
野战救护智能辅助系统的设计与实现
2020-03-13 03:23朱捷周丽梅袁丹凤杨傲周继红王正国
军事护理 2020年2期
朱捷,周丽梅,袁丹凤,杨傲,周继红,王正国
(1.陆军军医大学大坪医院 野战外科研究所,重庆 400038;2.联勤保障部队第901医院 护理部,安徽 合肥 230031)
在有限野战医疗资源条件下,如何实现及时有效的野战急救是亟待研究和解决的问题。伴随微机电、微电子和无线通信等技术的进步,基于微型传感器及无线通信技术的普适感知环境技术在医疗监控、应急救治等方面的广泛应用,为解决这一问题提供了研究思路。随着传感器技术的快速发展,微型传感器芯片不仅能实现多种个人信息的采集和传输,还可以对周围战场环境进行监控,从而构建普适感知的战场环境。为有效解决战场伤员实时感知、精确定位、高效救护等问题[1],本研究提出一种适用于野战条件的医疗救护智能辅助系统,可在突发和紧急情况下通过组网协作为士兵提供医疗救护服务,现介绍如下。
1 野战救护智能辅助系统的设计原则
本野战救护智能辅助系统基于无线网络和多传感器组合进行设计,依靠无线网络实现数据传输,利用无线射频识别技术(radio frequency identification,RFID)、近场通信、北斗、血压感应器等传感器实现人员身份识别、状态监控和信息实时传送,传感器嵌入单兵便携装备如智能手表、手机和通信机等。本系统具有两个特征:状态感知和组网协作。前者是该系统工作的基础,后者则是该系统具体实施方式。
系统在检测到单兵重要生命参数出现异常情况时,发出预警或求救信号。考虑到战场环境错综复杂,可通过该系统查找附近士兵,并由指挥中心向士兵发出救治行动命令。另外,系统还依靠先进的通信手段和数据共享实现伤情现场的后方还原,从而使具有医疗经验的后方医护人员实时指导伤员自身或救援士兵正确处理伤情。
1.1 状态感知 野战救护智能辅助系统给多个终端提供实时单兵状态信息,包括位置信息、环境信息、心率及体温信息等,后方指挥或医护人员根据这些信息提供针对性帮助。从单兵装备获得的信息具有离散性和不相关特性,考虑到战场环境复杂及救治时间紧迫,后方保障人员难以完成所采集数据的实时分析和处理,要求系统具备对采集数据的智能分析功能,如自动完成伤员生理参数采集、战伤评分计算、伤势分类,结合战场态势智能化形成救治策略和优先级别。
单兵自身传感器和战场传感器的融合也是系统设计需要考虑的重要内容,大量战场分布的传感器为医疗救治的实施提供了辅助信息。例如,一个智能的位置系统应包含基于全球导航卫星系统定位的个人地理信息、基于Zigbee定位的局部位置信息以及附近人员位置信息。实际中,这些数据会被后方指挥、医护人员及单兵自身使用,因此系统架构的设计和实现应是一种松耦合的结构。
1.2 组网协作 野战条件下的组网协作非常重要,在伤情处置中同样如此。为提高野战条件下的医疗救助效率,不能仅仅按班排形成团队,而是需要利用一切可以利用的资源,包括战场上的任意一名单兵、指挥员或医护人员。由于战场突发情况不可预见性,各种伤员救护预案往往不能满足需求。因此,系统应根据伤员具体情况临时组成一支救治小组,不同组员具有不同功能,如早期救助、前方后送、医疗救治、运输安排等,组员间可进行实时通信和数据共享,这样才能在突发情况下完成搜救任务。相比于民用医疗救助系统,野战条件下的组网协作不仅要求尽可能采用简单高效的组网技术,还应具备更高的智能化程度,从而降低对参与救治人员医护素养的要求。
2 野战救护智能辅助系统模型
2.1 野战救护智能辅助系统模型的组成 系统通过传感器和无线通信技术连接,实时监测战场战况及伤情的发生,指挥员、医护人员和单兵通过监测中心实现数据的共享。主要包括单兵(individual soldier, IS)、传感器模块(sensor module,SM)、个人信息处理模块(personal information processing,PIP)、医护人员模块(medical supporter, MS)、监测中心模块(medical center,MC)、后方指挥模块(rear command,RC),见图1。
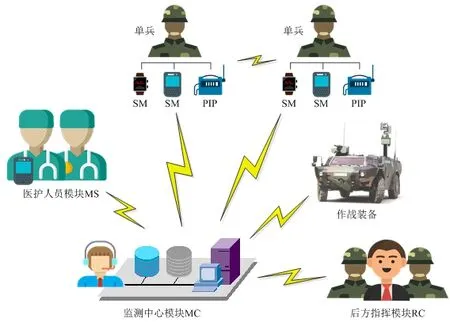
图1 野战救护智能辅助系统模型示意图
2.2 传感器模块 传感器模块由单兵个人携带和战场部署组成,实时采集环境和个人原始信息发送到个人信息处理模块。单兵携带了多种传感器用于监测小范围的信息,如位置、心率、血压及环境参数等;战场传感器包括部署在作战装备上的大型传感器或通信设备,可以监测我军和敌军等大范围的信息。
2.3 个人信息处理模块 个人信息处理模块处理传感器实时采集的数据,智能判断伤情等级和选择处理方式。当监测到异常情况时,实时通知单兵和监测中心,同时上报传感器采集的信息。
2.4 医护人员模块 医护人员模块存储并监控医疗组所有人员信息,包括人员位置、技能等,在突发情况下选择合适的医护人员对伤员提供医疗帮助,见图2。

图2 监测中心和医护人员的信息交互
2.5 监测中心模块 监测中心收到求救信息后立即对伤情进行评估并根据实际可支配医护人员分布给出解决方案,并将结果上报指挥中心。图2显示了监测中心和救护人员的信息交互。当监测中心接收到伤情求助后,根据上报采集的信息判断伤员情况,然后根据伤情选择合适的处置方案并发送求助信息(call for assist, CFA)到医护人员模块(分布于战场上的医疗救护人员),CFA信息包含伤员的身份(identity,ID)、位置和伤情等。医疗救护人员收到CFA信息后,向监控中心返回同意通知消息(answer note, AN),该消息包含了可以参与的医护人员ID和位置等信息,监控中心将这些信息与指挥中心交互后给对应人员或模块发出命令。如果出现伤员昏迷和医护人员不能立即赶到事发地点,监测中心将选择最近的单兵对伤员提供帮助,并让医护人员对其进行指导。如果伤情严重,监控中心联系指挥中心,在控制伤情后进行后送救治。
2.6 后方指挥模块 后方指挥模块实时监控,在各战场的监控中心合理分配医疗资源,并结合战场态势实时调整救治策略,根据战伤大数据研究结论,配置野战条件下严重创伤评估/评分方法和危险值域[2]。
3 基于WCF技术实现的系统框架
该系统采用了基于Windows 通讯基础(Windows communication foundation,WCF)技术的实现方案。图3是基于WCF技术实现面向服务的松耦合系统框架。WCF是NET架构中的技术,可用来创建面向服务的应用程序、交换不同通信方案中的消息,以及执行由服务操作生成的工作流。面向服务的架构被认为是目前在分布式系统上最优的框架结构,可以显著简化软件生命周期管理,根据需求的变化易于更改和维护。系统主要由监视援助层、信息管理层和团队组织层组成。
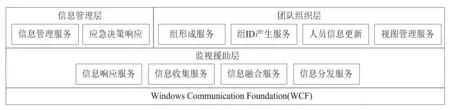
图3 基于WCF技术的系统框架
3.1 监视援助层 主要功能包括:(1)整合管理所有传感器;(2)收集、融合和分发各种传感器原始信息;(3)监测单兵实时状态,分析判断伤情;(4)紧急情况下,通知监测中心,发出求救信号。监视援助层组件交互如图4所示。通常采用定时方式,信息响应服务(information response service, IRS)向传感器发出数据请求,定时请求的时间间隔取决于实际对数据的要求。如为了得到实时位置信息,位置传感器可能被频繁地采样,而环境温度传感器的采样频率就低很多(例如10分钟采样一次)。一旦检测到从传感器获得有用原始数据信息,IRS立即转发到信息收集服务(information gathering service, IGS)和信息融合服务(information aggregation service, IAS)。IGS保存了近期的数据以及单兵的一些个人信息,以检测可能的危险情况,为后方指挥人员或医护人员提供救护所需信息。另一方面,IAS汇总不同背景来源获得的各种信息,并检测可能的危险情况。最后,信息分发服务(information distribution service, IDS)负责汇总数据并分发给相应的模块,例如,在紧急情况下,IDS发出一条救助信息到应急响应决策模块(emergency response decision module, ERDM)中,救助信息包括如单兵的个人信息、位置信息及重要生命体征等。系统支持救援主动行为方式,即在紧急情况下,单兵可通过个人通信系统无线广播救助信息,附近士兵接收广播救助信息后根据自身状态决定是否提供帮助。但这也会带来安全性和假警报的问题[2],安全性问题是指频繁的广播救助信息可能会被侦察,破坏人员的隐秘性;假警报问题是由于战场环境复杂,传感器系统的检测技术可能对危险情况存在一定的误判,因此在确认发生紧急情况时,检测其原因和类型的监测中心模块工作人员的参与非常重要。
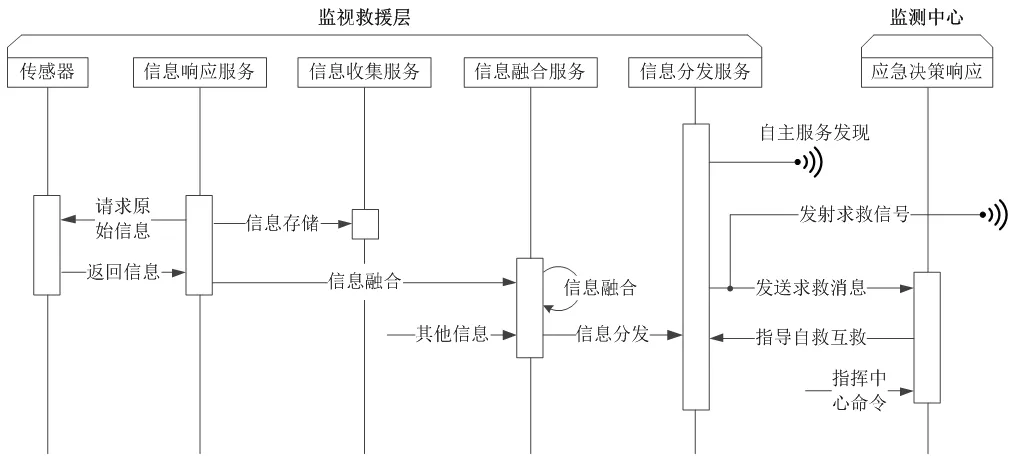
图4 监视援助层组件交互
3.2 信息管理层 监测中心从单兵的个人信息管理模块接收到伤情请求后,在消息管理层触发ERDM事件并上报请求进行伤员处置。图5显示了信息管理层的工作流程,ERDM模块根据当前伤员的伤情和位置信息,通过临近服务模块得到合适的医护人员或可以提供帮助的单兵,在MC模块根据人员的ID,可以得到人员的职别、医疗经验及兵种等信息。最后,ERDM模块将方案提交到团队组织(group formation service, GFS)模块,并建立医疗方案小组。

图5 信息管理层工作流程图
3.3 团队组织层 根据文献[2]设计的改进,团队组织层主要实现了组成、管理和解散医疗救治小组的功能。当需要建立医疗救治小组的时候,指挥中心初始化GFS模块,产生一个救治小组。为了达到这个目的,GFS通过组ID生成服务(group ID generation service,GIGS)模块随机产生一个小组ID用于标识,如图6所示。通常情况下,人员视图服务(view manager service, VMS)模块建立、维持、更新和发布成员列表信息到每个小组成员,该列表内包含了每个成员的简要信息,如组别ID、身份ID、职别、负责工作等。同时,为了提高效率和防止冲突,VMS模块实时从人员信息更新服务(personnel information update service,PIUS)模块通信得到小组人员当前的位置信息,估计出发、到达时间。
4 系统特点
4.1 智能化伤情判断和急救支援的探索 本系统结合军标的简易战伤计分、休克指数(shock index)、呼叫应答模拟神志状况、自身传感器采集的生理指标(体温、心率、血压等),通过模拟战伤数据库的大数据研究,探索野战条件下严重创伤评分方法和危险值域[3],根据美军战术作战伤员救护(tactical combat casualty care,TCCC)实用性原则区分可救或不可救[4],并结合战场态势智能化形成救治策略和优先级别。
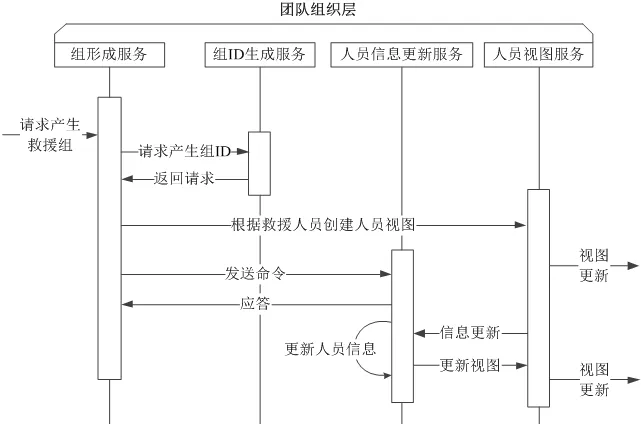
图6 救护小组建立交互
4.2 网状指控结构 本系统为网状指挥控制结构,相对于传统的树状指控结构,更强调个体之间的自同步。自同步是指两个或两个以上个体之间对外部情况进行主动协调的一种交互反应模式, 能对瞬息万变的战场情况做出自主的反应,其协调关系是动态、突发的, 不受严格的指挥等级约束, 具有速度快、信息共享能力强、互操作能力强等方面的优势。
5 小结
本文探讨了野战环境下救护智能辅助系统框架的设计和实现,并在原硬件平台上实现了系统的原型;相比于民用社区卫生数据采集、监护系统,本研究基于网状指控结构和即时战救团队组成及合作的方式,探索了野战条件下救治优先级别策略。理论上由于医护资源有限,一般需要把伤情最严重的给予最高的优先级,但在实际战场环境中,监测中心还要根据战场环境情况、交通情况以及医护人员信息,才能形成一个迅速正确的处置方案,是一个非常复杂的多属性决策问题。战场的电磁环境非常复杂,下一步研究的重点将在依靠更有效的传感器和通信技术,实现一个抗干扰能力强,更加稳健的救治系统。另外,因实战环境的制约,信息安全也是需要着重研究和考虑的问题。
猜你喜欢
装备环境工程(2022年6期)2022-07-09
领导决策信息(2018年8期)2018-05-22
领导决策信息(2017年39期)2017-11-27
领导决策信息(2017年24期)2017-07-18
幸福(2016年9期)2016-12-01
中国环境监察(2016年11期)2016-10-24
灾害医学与救援(电子版)(2016年3期)2016-03-11
中国卫生(2015年3期)2015-11-19
中国卫生(2015年8期)2015-11-12
幼儿教育·父母孩子版(2015年9期)2015-11-09
