农用电动车辆预换挡过程转速鲁棒控制方法
2020-03-11 04:00:42朱胤斐邱明明秦菲菲
农业机械学报 2020年1期
张 琰 赵 韩 朱胤斐,2 黄 康 邱明明 秦菲菲
(1.合肥工业大学机械工程学院, 合肥 230009; 2.斯威本科技大学软件与电气工程学院, 墨尔本 3122)
0 引言
日益严峻的环境问题和能源压力推动了新能源车辆产业的蓬勃发展,电动车辆具有效率高、能耗低、污染小、噪声小等优点,逐渐成为农业机械领域的热门课题[1]。电驱总成作为其中关键部件,其控制质量对车辆性能具有重要影响[2-3]。与传统燃油车辆的发动机驱动系统相比,电机驱动系统没有离合器部件,对传动精度要求更高,对其控制方法也提出了更高的要求[4-7]。换挡控制作为多挡电动车辆控制的重要部分,极大影响了驾驶平顺性,受到了广泛关注:文献[8-9]对换挡策略进行了研究,文献[10-12]采用分段方法控制换挡过程。同步控制是换挡控制的核心问题[9],极大影响了换挡品质,文献[13-14]研究了其中的电磁同步过程及其控制方法。
农用电动车辆换挡过程中的电磁同步控制问题存在诸多难点。与一般道路车辆相比,农用车辆工作条件恶劣,载荷波动频繁。同时,系统惯性和状态测量误差等可能导致高频颤振,因而必须考虑控制方法的鲁棒性。鲁棒控制包括H∞、μ、Kharitonov和Lyapunov等多种方法[15],其中Lyapunov方法是唯一具有理论基础并应用于非线性非自治系统的方法[19]。
本文研究一种基于电驱动系统模型和转速误差的电机速度同步鲁棒控制算法,基于Lyapunov方法对其控制稳定性等进行证明,并通过仿真与试验进行进一步验证。
1 动力学模型
目前纯电动农用车辆多采用单电机驱动,难以满足农田作业的多工况、经济性要求[7],本文考虑一种两挡纯电动车辆的电驱总成系统,如图1所示,其布局方式继承传统燃油车辆,包含驱动电机、变速器和主减速器等部分。其中驱动电机选用具有良好可控性的永磁同步电机(Permanent magnet synchronous motor, PMSM),换挡执行器选用同步器。图中,ωm为变速器输入轴角速度,即电机转子转速,Tm为驱动电机的输出扭矩,Jin为输入轴等效转动惯量,ωt为输出轴角速度,Tt为传动系统的传递扭矩,Jout为输出轴等效转动惯量,ωv为车轮角速度,Jv为车辆等效转动惯量,Tv为车辆行驶阻力矩,in和ig分别为当前变速器和主减速器的传动比。
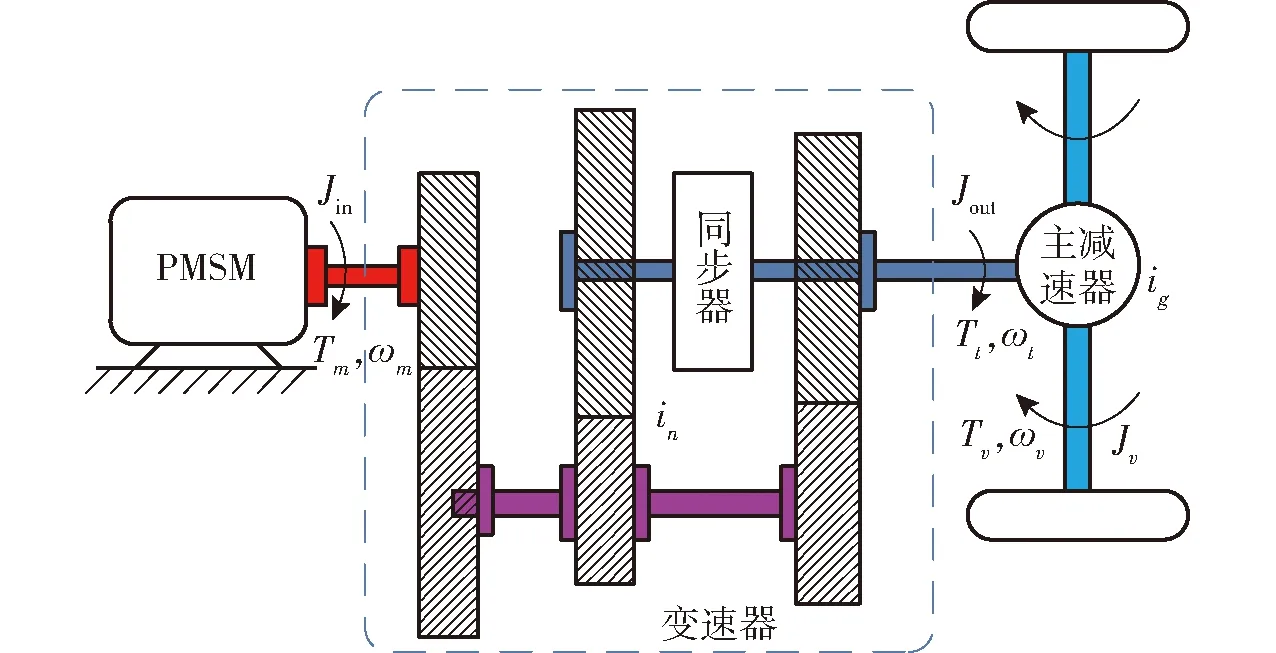
图1 电动车辆电驱动系统Fig.1 Drive system of electric vehicles
当车辆正常行驶时,同步器处于结合状态,变速器挡位固定,传动比为常数。电机-变速箱以及车轮-车辆动力学系统通常可处理为单一惯性系统,其动力学方程可表示为
(1)
当车辆换挡时,系统处于动力中断状态,此时Tt=0,并且忽略输入轴自身转动惯量,将Jin近似等于电机转子上的等效转动惯量J,则式(1)转换为
(2)
换挡过程最终目的是完成换挡时同步器输入端与输出端的转速同步,消除当前挡位与目标挡位的转速差。由于车辆的惯性相对较大,而换挡时间相对较短,因而将同步阶段车速近似于一个常数,PMSM当前挡位与目标挡位角速度差为
(3)
式中in+1——目标挡位变速器传动比
v——车辆行驶速度
Rt——车轮半径
换挡转速同步通过电磁同步和机械同步共同实现,整个换挡过程可分为同步器摘挡、预换挡(电磁同步)和同步器进挡(机械同步)3部分。通过定义剩余角速度差[Δω]判定何时完成预换挡,进入下一步的机械同步过程。

(4)
式中Te——电机电磁转矩
Bm——粘性阻尼系数
Tl——电机负载转矩P——磁极对数
iq——矢量控制时交轴上的电流分量
Ψf——电机转子磁链
如果将iq作为控制变量,则式(4)可以改写为
(5)
2 鲁棒控制
2.1 鲁棒控制器设计

e(t)=θ(t)-θd(t)
(6)
则有
(7)

(8)
则式(4)可以改写为
(9)
PMSM系统受到J、Bm、Tl等变量参数不确定性的影响,其中Tl的不确定性包括前文所述的模型误差和其他外界干扰。为了减少参数不确定性以提高控制性能,引入名义变量、m、l分别对实际变量J、Bm、Tl进行估计,定义为
(10)

(11)
其中
(12)

(13)
其中
(14)

(15)
对于控制增益而言,ε综合调节稳态误差与控制代价,通常取值较小,可以通过选取一个极小的ε来实现高精度跟踪,但可能由此导致控制输入产生严重颤振。因此,需要权衡控制稳定性与跟踪效果。而Kp、Kv分别是比例项与微分项控制增益,其取值可以根据实际模型和控制精度来调整,与传统PD控制调试方法一致[21]。
鲁棒控制器结构如图2所示,该控制继承了传统PID控制和鲁棒控制的优势,兼具误差控制和模型控制的特点。控制器式(13)的前3项是名义控制项,而最后一项p控制是对不确定性的补偿。分段函数式(14)本质上是一个鲁棒反馈项,用于减弱模型不确定性和外部干扰的影响。在没有p控制的情况下,该控制将演变为一种与传统的单纯基于PD控制不同的、基于模型和基于误差的PD反馈控制。该控制方法使得式(9)一致有界并且最终一致有界。通过适当选择ε,该最终有界的范围可以达到任意小。

图2 PMSM系统鲁棒控制方法Fig.2 Robust control method of PMSM system
2.2 控制稳定性
通过Lyapunov方法进行控制稳定性证明,选择Lyapunov候选函数为
(16)
该Lyapunov候选函数的合法性以及前文所述控制器的稳定性证明如下。
2.2.1正定性和递减性
为了证明V是一个合法的Lyapunov候选函数,需要证明V是全局正定且递减的
(17)
(18)

(19)
由文献[19]中引理1可以证明V是一个全局正定函数
(20)
(21)
故可得
(22)
根据文献[19]中引理2可以证明V是递减函数。综上证明V是合法的Lyapunov候选函数。
2.2.2稳定性
利用上述Lyapunov候选函数V来证明控制器的稳定性。V沿被控系统式(9)对时间的导数为
(23)
(24)
因此由式(11)、(24)可得
(25)
根据式(23)、(25)可得
(26)

(27)
定义函数d(t)为
(28)
其中
(29)

(30)

3 计算与仿真
相对于工况较为单一的一般道路车辆,农用车辆田间作业种类繁多,作业负载覆盖范围广[7],在验证时需考虑其高不确定性特点以模拟农用车辆工况。基于Matlab软件进行数值仿真,将前文所述的鲁棒控制与传统PD控制进行比较。相关仿真参数的选取参照文献[12]中的实车参数,包括系统名义参数、控制器参数和系统模型不确定性,具体参见表1~3。农用车辆所受负载变化频繁,并围绕一个均值小幅度波动,为验证电动车辆在负载波动变化工况下的控制效果,根据牵引性能试验确定系统模型不确定性波动范围,根据文献[7]将不确定性幅值假定为名义参数值的20%,由噪声模拟[14],如图3所示,其余模型不确定性由正弦函数模拟[23],如表3所示。为比较两种控制的效果,在PD控制部分两种控制器选择的参数完全相同,控制器的不同之处在于是否含有模型项及p项的不确定性补偿。
采用鲁棒控制算法和传统PD控制算法进行仿真对比,采用龙格库塔法进行数值计算。

(31)
其中,n是节点数,仿真选取1 ms为采样周期,采样时间t={0,0.001,…,0.6}则n={1,2,…,600}。

表1 系统名义参数Tab.1 Nominal parameters of system

表2 控制器参数(仿真)Tab.2 Parameters of controllers

表3 系统模型不确定性Tab.3 System’s model uncertainty

图3 负载不确定性Fig.3 PMSM’s speed synchronizing performance
PMSM响应转速曲线如图4所示,两种控制方法都能达到预期的速度,而鲁棒控制可以提供较小稳态误差和较好的动态响应性能。图5及表4显示了两种控制的同步误差对比,可以看出,鲁棒控制的峰值误差与稳态误差均明显低于传统PD控制。由表4可以看出,鲁棒控制同步误差的各统计参数均具有明显优势。

图4 PMSM转速同步性能Fig.4 PMSM’s speed synchronizing performance
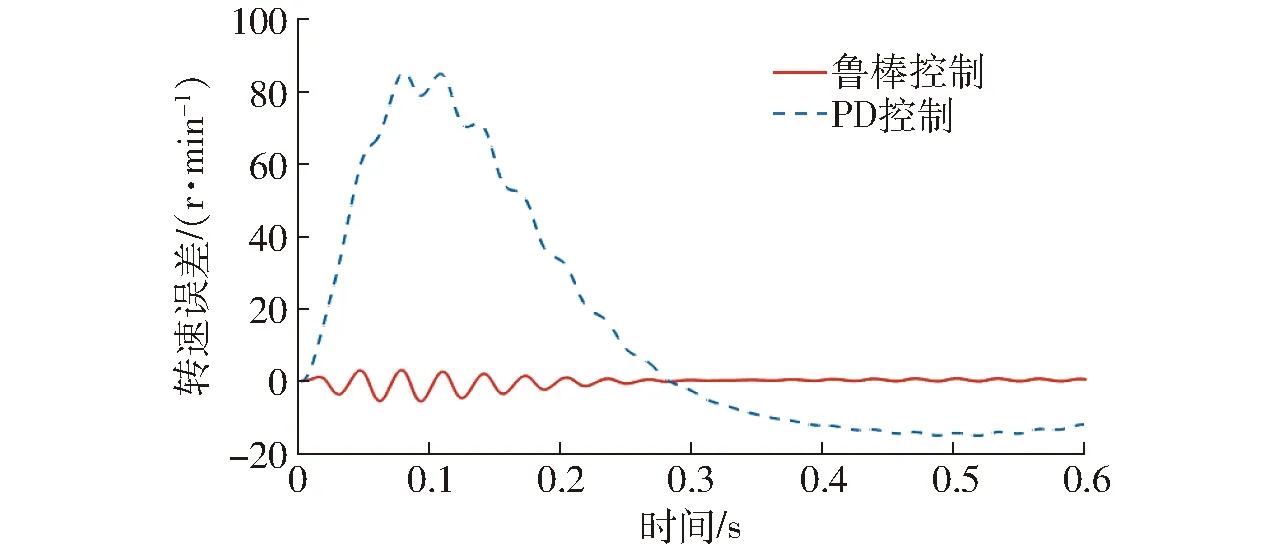
图5 转速同步误差Fig.5 Speed synchronizing error
表4 同步误差统计分析对比
Tab.4 Statistical analysis and comparison ofsynchronizing errorr/min

控制方法eemaxσePD控制29.7485.4327.10鲁棒控制1.145.841.43
图6、7为两种控制的控制力矩和控制电流对比,可以看出两种控制器的控制输入相差不大。由于实际系统的各种环境不确定性和模型不确定性,控制设计中需要解决初始条件不相容的问题。图8、9为两种控制在初始条件不相容情况下的控制效果,可以看出,鲁棒控制仍然具有更好的转速同步效果和更小的同步误差。
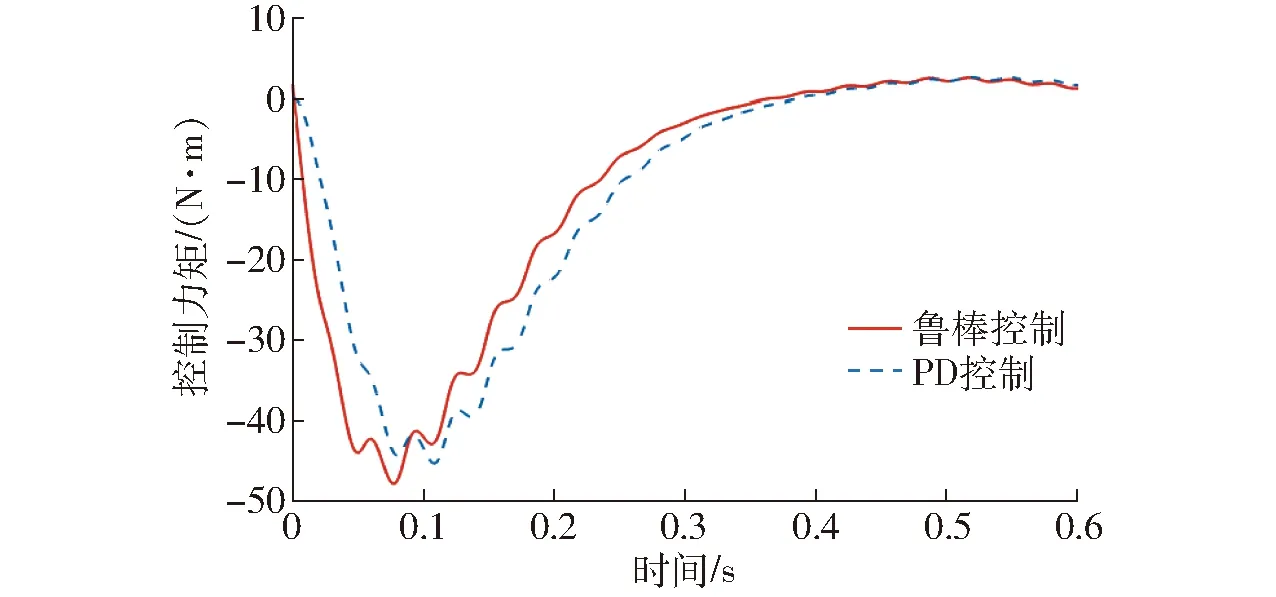
图6 PMSM控制力矩Fig.6 Control torque of PMSM
通过以上数值仿真和分析,可以初步认为含有p项的鲁棒控制比不含p项的传统PD控制具有更好的控制性能。

图7 PMSM控制电流Fig.7 Control current of PMSM

图8 初始条件不相容情况下转速同步性能Fig.8 PMSM’s speed synchronizing performance with initial condition deviation
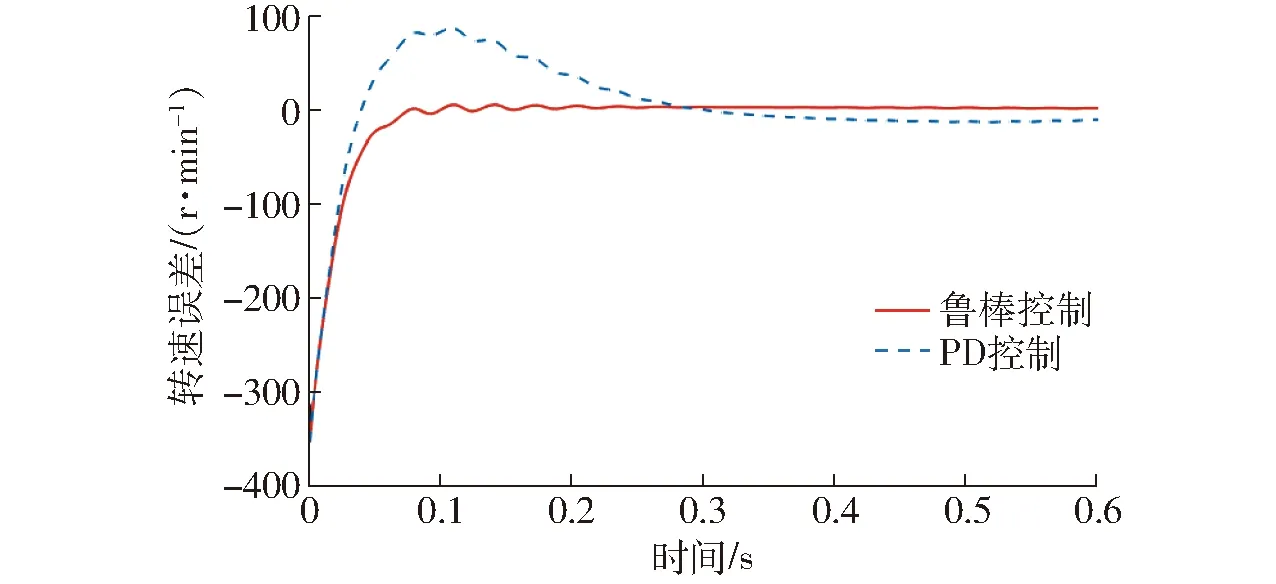
图9 初始条件不相容情况下转速同步误差Fig.9 PMSM’s speed synchronizing error with initial condition deviation
4 试验
为进一步验证鲁棒控制器的有效性,搭建PMSM系统试验台如图10所示。试验台由伺服电机平台(图10a)、cSPACE驱动控制器(图10b)和装有控制软件的上位机(图10c)组成,其中伺服电机平台由负载直流电机、联轴器及装有光电编码器的PMSM组成。驱动控制板接收来自光电编码器的PMSM旋转角度位置信息,并利用功率管驱动PMSM工作,负载直流电机提供可调节的负载。采用直轴电流id=0的矢量控制方法进行嵌套双闭环控制[24],电流控制环采用PI控制,PMSM控制器速度控制环采用前文所述的鲁棒控制。通过采集相电流实现电流闭环,通过转子位置信号计算出当前速度信号作为图2中的传感器负反馈信号,实现速度闭环。

图10 PMSM伺服控制试验台Fig.10 PMSM servo control test platform1.负载直流电机 2.联轴器 3.PMSM 4.光电编码器 5.上位机软件界面
由于传统控制器通常采用串行开发模式,即首先进行功能定义,然后进行硬件设计,使用C语言等进行代码编写,完成软硬件及外部接口集成,最后进行系统试验。本试验平台采用cSPACE快速控制原型开发系统为开发平台提供了一种高效的实时控制算法系统。通过Matlab/Simulink软件及控制板产生控制信号,由电机驱动板卡对PMSM进行实时控制及系统校验。由于cSPACE在Matlab环境的基础上开发,与仿真软件一致,整个开发周期无缝集成到单一Matlab环境,使得仿真和测试之间的各个开发阶段可以直接运行并重复调试,无需频繁调整。
试验步骤如下:
(1)利用Matlab/Simulink软件实现PMSM模型和控制器的建模,并参照实物选取相关参数。
(2)结合cSPACE硬件接口获得图形化编程模块,并自动生成代码由USB接口下载到驱动控制板中,利用功率管驱动PMSM工作。
(3)通过上位机接口观察试验结果,并在线调试变量参数。
(4)利用上位机采集数据,利用Matlab的各项功能对数据进行分析处理。
相关试验参数参见表5、6。目标速度轨迹与仿真一致。两种控制器的PD参数保持一致,而不同之处在于是否含有模型项及p项的不确定性补偿。为验证控制器的鲁棒性能,在负载直流电机上分别加载恒定载荷和时变负载(正弦负载),图11~14为试验结果。对预换挡过程中的转速响应进行局部放大,图11、12为两种负载下鲁棒控制和PD控制下的转速同步性能。试验运用直轴电流id=0的矢量控制方法,将iq作为控制输入,图13、14为两种负载下两种控制的控制电流。从图中可以看出,不论是恒定负载还是时变负载,鲁棒控制相对于PD控制都能更加快速精确地进行速度收敛,且在稳态下具有更好的跟踪效果。参考仿真部分对同步性能参数进行统计分析处理,如表7所示,可以看出,不论是对于恒定负载还是时变负载,鲁棒控制相对于PD控制都具有更优的结果。同时,鲁棒控制器的控制电流输入峰值略有减小并且整体更加平滑,有利于降低功率变换器的负担,同时有利于电动车辆电路系统维护。试验结果表明鲁棒控制器具有更好的速度跟踪控制性能。

表5 试验参数Tab.5 Test parameters of system

表6 控制器参数(试验)Tab.6 Parameters of controllers

图11 恒定负载下PMSM转速同步性能Fig.11 PMSM’s speed synchronizing performance with constant load

图12 时变负载下PMSM转速同步性能Fig.12 PMSM’s speed synchronizing performance with time-varying load

图13 恒定负载下PMSM控制电流Fig.13 Control current of PMSM with constant load
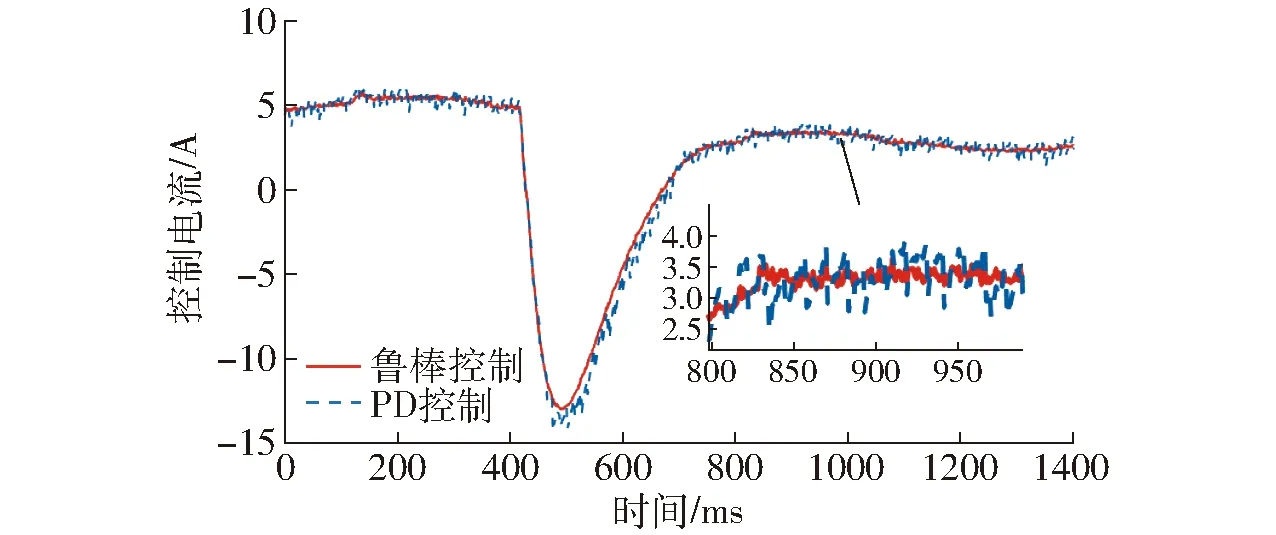
图14 时变负载下PMSM控制电流Fig.14 Control current of PMSM with time-varying load

r/min
5 结论
(1)提出了一种PMSM速度同步非线性鲁棒控制算法,从传统PD控制和鲁棒控制两个方面分析了其误差控制和模型控制。针对农用车辆工作条件不稳定、负载扰动大等特点,将模型不确定性和外部干扰集中到一个具有假定上限的函数,并进行了鲁棒补偿控制。
(2)基于Lyapunov方法从理论上分析了控制的稳定性,证明其具有一致有界性和最终一致有界性。
(3)通过数值仿真验证了一般情况和初始条件不相容情况下的速度同步效果,并通过台架试验进一步验证恒定负载及时变负载下的同步性能。结果表明,对于同一PMSM目标转速轨迹,在相同PD控制参数条件下,鲁棒控制器的仿真转速同步误差平均值与标准差均具有明显优势,在台架试验中优于传统PD控制30%以上。
猜你喜欢
法律方法(2022年2期)2022-10-20 06:41:56
自动化学报(2019年6期)2019-07-23 01:18:22
中国外汇(2019年7期)2019-07-13 05:45:04
厦门理工学院学报(2016年1期)2016-12-01 04:50:41
北京航空航天大学学报(2016年7期)2016-11-16 01:51:01
系统工程与电子技术(2016年4期)2016-08-24 07:46:22
系统工程与电子技术(2016年4期)2016-08-24 07:46:18
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17
自动化博览(2014年4期)2014-02-28 22:31:15