
卧式数控机床对刀间隙自动检测系统设计
2020-03-04 02:48李铁
现代电子技术 2020年2期
关键词:图像采集
李铁


摘 要: 为了克服人工操作检测系统对刀间隙检测精度低的弊端,设计新的卧式数控机床对刀间隙自动检测系统。系统核心由光源、CMOS图像采集模块与自动检测模块构成,使用红色环形光源照射工件与刀具的间隙部位,CMOS图像采集模块通过CMOS摄像机采集间隙图像,并通过USB接口传输至自动检测模块,自动检测模块通过基于Hough 变换的对刀间隙自动检测算法,对得到的间隙图像进行计算,获取刀具和工件的间隙值。经验证,所设计系统能够有效检测对刀间隙,且检测精度与检测鲁棒性优于同类检测系统,应用价值可观。
关键词: 对刀间隙; 自动检测系统; 卧式数控机床; 图像采集; 间隙计算; 实验验证
中图分类号: TN948.7?34; TG519.1 文献标识码: A 文章编号: 1004?373X(2020)02?0029?03
Design of tool aligning gap automatic detection system for horizontal NC machine tool
LI Tie
Abstract: A new tool aligning gap automatic detection system for horizontal NC machine tool is designed, which can overcome the low precision of tool aligning gap detection in the manual operation detection system. The system core is composed of the light source, the CMOS image acquisition module and the automatic detection module. In the system, the red ring light source is adopted to illuminate the gap area between the workpiece and tool, the CMOS image acquisition module is used to collect the gap images with the CMOS camera and transmit them to the automatic detection module through the USB interface. The automatic detection module is applied to calculate the collected gap images by means of the tool aligning gap automatic detection system based on the Hough transformation, with which the gap value between the workpiece and tool is obtained. It is verified that the designed system can effectively detect the tool aligning gap, and the detection accuracy and robustness are better than that of the similar detection systems, which has the considerable application value.
Keywords: tool aligning; automatic detection system; Horizontal NC mechine tool; CNC machine tool; image collection; gap calculation; experiment verification
0 引 言
卧式数控机床的研发使世界机床工业发生巨大变变化。其不仅速度快、误差小、自动性优,而且附加值也较大,该领域的技术与产品备受关注[1]。伴随机械制造业的快速发展,卧式数控加工时对刀装置的设定也逐渐增多,对刀保证刀具在数控机床操控中,让加工工件相对于定位基准存在合适的尺寸关系[2]。对刀间隙情况的控制与加工误差、程序设置的简单水平存在较大的关联性。本文围绕卧式数据机床对刀间隙自动检测问题进行深究,提出卧式数据机床对刀间隙自动检测系统的设计,以期实现高精度卧式数控机床对刀间隙自动检测。
1 对刀间隙自动检测系统
1.1 系统硬件设计
卧式数控机床对刀间隙自动检测系统包含了光源、CMOS图像采集模块、自动检测模块。CMOS模块中包含了分辨率是[1 280×1 024]、像元尺寸是[5.2 μm×5.2 μm]的MVC?1000MF黑白面阵CMOS相机。镜头属于物方远心镜头,焦距是67 mm。为了提高对刀间隙检测精度和图像清晰水平,在相机和镜头里放入一个2倍光学放大倍率的放大镜头,得到的图像大小是[1 280×1 024]。卧式数控机床对刀间隙自动检测系统的设计结构见图1。
卧式数控机床对刀间隙自动检测系统使用红色环形光源照射间隙部位,CMOS图像采集模块通过CMOS摄像机采集间隙图像,并通过USB接口传输至自动检测模块。自动检测模块通过基于Hough 变换的对刀间隙自动检测算法对得到的工件图像进行计算,获取刀具和工件的间隙值[3]。
1) CMOS图像采集模块
CMOS图像采集模块中设计了高帧频CMOS成像单元、保存单元、数据采集单元。高帧频CMOS成像单元属于CMOS图像采集模块成像部件,其属于卧式数控机床对刀间隙自动检测系统的视觉部门,可获取运动目标图像。保存单元中配置了静态保存器SRAM和缓冲电路,用于记载图像传感器输出图像信息。数据采集单元中设置数据采集卡和采集接口电路,实现对保存单元的图像数据采集任务[4]。
2) 自动检测模块
自动检测模块的工作原理见图2。
自动检测模块采用基于Hough 变换的对刀间隙自动检测算法,对得到工件特征进行提取并完成间隙计算。在卧式数控机床轴向X方位,把CMOS图像采集模块采集的图像进行工件与刀具的数据提取,并依次判断工件与刀具尖点位置,调换刀具和工件的Y,Z向的差距[5?6]。
1.2 基于Hough变换的对刀间隙自动检测算法
1.2.1 形状角类型分类
形状角的值和所处方位与方向不存在关系,但和工件轮廓的几何性状具有相关性,使用几何不变量?形状角[Aα]将CMOS图像采集模块的工件图像实行先期性状类型区分[7]。形状角[Aα]为:
[Aα=1mi=0m-1βi=1mi=0m-1arccosbi,ni] (1)
式中:針对工件轮廓中的各点,设定它的轮廓质心连线是[ni],此点的法向量是[bi],夹角是[βi];工件轮廓中各点相应[βi]均值即为工件形状角[Aα],m与i均表示量词。
1.2.2 矩形工件特征点提取
对工件图像平面里直线中的各点,采用Hough 变换至参数空间变成一条曲线,运算每个曲线角点能获取工件图像空间里的直线。
先检测工件图像非零点,把一点设成起始点[Bx1,y1],把这作为中心框得到一个矩形范围,将此范围里非零点[Cixi,yi]依次扫描[8]。将当中2个非零点相应直线参数组合[?i,φi]实行运算:
[?i=xicos φi+yisin φiφi=arctany1-yix1-xi] (2)
式中,x与y为坐标点,该参数组合为矩形工件特征点。
1.2.3 圆形工件特征点提取
为了提高圆形工件的检测效率,将工件图像按水平方向进行扫描[9]。采用自上至下的第j条水平扫描线[Gsj]扫描工件轮廓线,能获取左焦点[YLj]与右交点[YRj]连线的中点[YMj],这样经过多个扫描线[0≤j≤M],便能获取多个中点,再通过Hough变换对全部中点[YMj]实行一维检索计算获取垂直直线[Zv]。顺着垂直方向扫描工件图像获取每个垂直扫描线[XSj]和轮廓线两角点连线的中点,对全部中点实行直线Hough变换获取水平直线[Zh]。[Zv]和[Zh]建立两个垂直相交的直径线,它的角点[xa,ya]是圆心,使用边缘线像素坐标能够获取圆的半径r,便可掌握圆形工件的上述特征点。
1.2.4 间隙检测实现
基于上述工件特征点的提取后,将刀平面实行直线插值拟合[10],拟合出工件中边缘直线方程为:
[Qx+Px+R=0] (3)
式中:[Q],[P],[R]均属于参变量,分别表示矩形工件特征点、圆形工件特征点以及形状角参变量;x表示坐标。并且检测获取刀具轮廓下边缘y坐标最小点,按照点至直线距离计算方法获取对刀间隙:
[H=Qx+Px+RQ2+P2] (4)
基于上述计算便可完成卧式数控机床对刀间隙自动检测。
2 实验分析
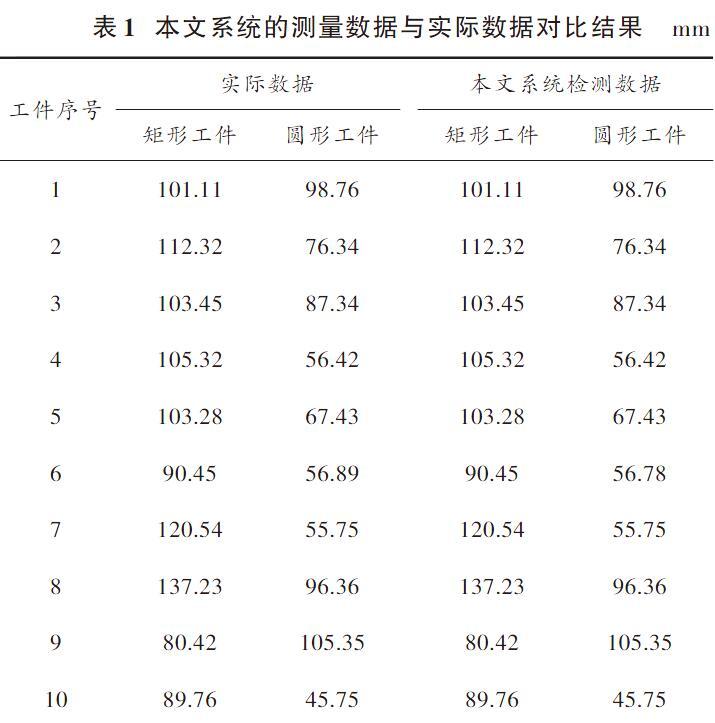
为验证本文系统对卧式数控机床对刀间隙检测的有效性,将本文系统安装至卧式数控机床上,进行实验验证。对比结果如表1所示。
分析表1数据可知,本文系统对卧式数控机床加工矩形工件和圆形工件时,对刀间隙检测结果和实际数据几乎一致,仅在第6个工件中的检测结果和实际出现偏差,但偏差仅有0.11 mm,这是因为圆形工件表面易出现反光,在采集工件图像时会影响图像的边缘性。
为深度分析本文系统检测能力,将本文系统、人工操作检测系统以及微机间隙自动检测系统进行性能对比实验,对比指标依次设成检测精度和检测鲁棒性。
1) 检测精度
设定矩形与圆形两种待加工工件,采用三种系统进行对刀间隙自动检测,分析三种系统的检测精度并进行对比,对比结果如图3所示。
分析图3数据可知,将三种系统应用在卧式数控机床中加工矩形工件时,本文系统最高检测精度为0.98,已超越另外两种系统检测精度;加工圆形工件时,本文系统对刀间隙检测精度最大值是0.96,仍大于另外两种系统的检测精度。由此可见,本文系统的检测精度最高。
2) 鲁棒性
鲁棒性是卧式数控机床对刀间隙检测性能的核心指标之一,如果鲁棒性低,则意味着检测过程中易遭到其他因素影响,导致检测误差较大,工件加工会出现异常。对比结果如图4所示。
由图4可知,将三种系统应用在卧式数控机床中加工矩形工件时,不管是矩形工件,还是圆形工件,本文系统的对刀间隙检测鲁棒性变动趋势始终位于人工操作检测系统和微机间隙自动检测系统的上方,检测鲁棒性最大值均是98.88%。则本文系统的检测鲁棒性最高,能够较为稳定地完成卧式数控机床对刀间隙自动检测任务。
3 结 论
本文以高精度卧式数控机床对刀间隙自动检测为目的,设计新的卧式数控机床对刀间隙自动检测系统,将本文系统、人工操作检测系统、微机间隙自动检测系统进行对比实验。实验结果表明,本文系统检测性能较好,符合卧式数控机床对刀间隙自动检测性能的标准。
参考文献
[1] 董广强.流体传动机构数控综合对刀装置设计[J].机床与液压,2016,44(22):28?29.
[2] 赵正华,杨文珍.卧式数控车床上下料三轴机械手的控制系统设计[J].机床与液压,2017,45(15):32?34.
[3] 史安娜,曹富荣,刘斯妤,等.卧式数控机床主轴系统热特性测试及研究[J].組合机床与自动化加工技术,2018(6):132?135.
[4] 彭玉建,夏继强,满庆丰,等.数控系统可靠性试验数据监测系统的设计与实现[J].组合机床与自动化加工技术,2018(7):60?62.
[5] ZHANG T, YE W, SHAN Y. Application of sliced inverse regression with fuzzy clustering for thermal error modeling of CNC machine tool [J]. International journal of advanced manufacturing technology, 2016, 85(9/12): 2761?2771.
[6] 刘世豪,杜彦斌,姚克恒,等.数控机床进给机构智能设计优化系统[J].农业机械学报,2017,48(5):397?404.
[7] LIU X, GROVE J C, HIRANO A A, et al. Dopamine D1 receptor modulation of calcium channel currents in horizontal cells of mouse retina [J]. Journal of neurophysiology, 2016, 116(2): 686?697.
[8] 葛济宾,周祖徳,娄平,等.嵌入式数控机床热误差补偿装置设计与实现[J].武汉理工大学学报,2016,38(6):102?108.
[9] VIGAN A, BONNEFOY M, GINSKI C, et al. First light of the VLT planet finder SPHERE. I. Detection and characterization of the sub?stellar companion GJ 758 B [J]. Astronomy & astrophysics, 2016, 587(2): 1?11.
[10] 何博文,尹韶辉,龚胜.数控机床非球面磨削加工精度建模仿真[J].计算机仿真,2018,35(6):231?235.
作者简介:李 铁(1972—),男,山东滕州人,工程师,研究方向为数控技术。
猜你喜欢
物联网技术(2017年2期)2017-03-15
科技创新导报(2016年25期)2017-03-13
哈尔滨理工大学学报(2016年4期)2016-11-10
电脑知识与技术(2016年23期)2016-11-02
科技视界(2016年24期)2016-10-11
