多输出多维度3D 打印冗余并联机器人设计与实现
2020-03-03 13:10陈金舰
设备管理与维修 2020年4期
陈金舰
(湛江幼儿师范专科学校 岭南师范学院基础教育学院,广东湛江 524000)
0 引言
3D 打印技术不仅能生产出传统加工技艺可以生产的产品,同时在生产内部构造复杂、对外部切面精度要求较高的产品时拥有较大的优势[1]。3D 打印技术已逐渐发展为制造业广受关注的新型加工技艺。现在市场上绝大多数基于熔融技术的3D 打印机,一次性只可以打印一个产品,且主要采取串联设计,以单向分级的打印方式制造产品。在实际应用中,这种打印机存在打印稳定性差、精确度较低、效率极低等缺陷,当以单向分级打印的方法对复杂斜面曲面进行加工或二次修复时,极易导致最终成型产品表面质量较差、基础性能降低等问题。多输出多维度3D 打印冗余并联机器人设计使用,旨在提高打印精度,使产品质量得以保证。
1 多输出多维度3D 打印冗余并联机器人设计
1.1 主要零部件的选择
(1)电机及联轴器。按照3D 打印机器人对参数的不同要求,筛选出科学合理的电机和联轴器,以确保3D 打印机器人的正常运转和操作。在电机的选择上,动平台每联动打印喷头打印一层,工作台在水平坐标方向发生一次位移,据此计算出3D打印一层所需的时间T,规定3D 打印周期为Ts,电机旋转1 圈需对应丝杆导杆的位置[2]。机器人设计过程需综合考虑现实需求、生产成本等一系列因素,经过全面整合与分析,最终选择87BYGHW209 步进电机。联轴器是用于连接不同构造或零件的主动轴和从属轴,使其一同完成旋转、扭矩动作的机械零件,是机械生产加工工艺中经常用到的连接部件。常见的精密型联轴器主要包括膜片联轴器、弹性联轴器、滑铁联轴器等。经过比对分析,选择弹性联轴器LS3-75-0902 作为多输出多维度3D 打印冗余并联机器人的传动设置。
(2)电动推杆。电动推杆作为一种将电机的旋转运动转变为直线牵拉运动的电动执行零件,其工作方法类似于常见的液压缸、气缸等执行部件,能实现远端控制或智能控制。电动推杆主要由电机、降速机、丝杠和推杆构成。构造设计有电机和推杆水平型、电机与推杆垂直型和电机推杆同向型。电动推杆具备构造简单、安全性好、单位面积小、质量轻、成本低廉,维修管理较为方便等优势。按照机器人设计的现实需要,设置机器人工作空间为80 mm×80 mm,以此确定推杆距离为90 mm[3]。另外,因为推杆承力较小,所以需要选择负载小、速度快的电动型推杆,在此基础上选择型号为JF-TGA-920 的电动推杆,其主要参数为距离90 mm,推(拉)力为50 N,电机选择交流伺服电机,电压22 V,额定功率15 W,产品参数如表1 所示。
(3)滚珠丝杠。滚珠丝杆型号基本已全面实现标准化,因此只需选择适合的型号即可。滚珠丝杠的承力基本有打印部件、工作台的质量以及摩擦引发的阻力。通过计算和查阅机械生产制造设计手册,选取滚珠丝杠直径为20 mm,螺旋距离5 mm,型号为BSS1914 滚珠丝杠。

表1 厂家电动推杆产品参数
通过设计解析,对主要零件进行基本选型,型号参数指标:电动推杆(JF-TGA-70),工作台电机(87BYGHW2099),弹性联轴器(LS3-75-0902),滚珠丝杠(BSS1914)。
1.2 3T1R并联机构
基于螺旋理论的冗余并联构造综合方法,构成打印机器人闭环运动支链(Limb)的运动副均可以表示为相对应的螺旋方式。其中,圆柱副S、虎克铰U、球副C 均能借助移动副R 和转变副P 表示。移动副R 的运动螺旋表示为:

式中:s0=r×s,r 代表水水平移动副R 的轴线至标准坐标原点下的常规矢量。转变P 的运动螺旋表示为:

式中:s 代表转动副距离轴线的距离矢量。每条运动支链中,限制螺旋Φr和运动螺旋的转变距离ΦT之间的互易积是0,即公式为:

式中:ΦT=[Φ4Φ5Φ6,Φ1Φ2Φ3],Φi代表第i 个旋转坐标系中的运动螺旋Φ。其中,前3 个螺旋代表位移,后3 个螺旋代表转动速度。那么,冗余并联动平台的约束螺旋表示为:

设机构的自由度为F,则:

式中:K=Rank(WP)代表WP 组成矩阵的标准秩,当K=2时,平台具备6 个自由度。
本文打印机器人设计的6 自由度并联构造,所需自由度需为双移动四转变,且只可以绕横坐标轴或纵坐标轴方向转动。所以,按照螺旋理论支持运动支链构造的基本运行条件,这种3T1R 冗余并联设计需要满足以下要求:①每条支链的限制螺旋属于纯限制力;②机器人运动支链的转动关节轴线必须平行或垂直于限制力;③运动支链的移动关节(驱动关节)必须垂直于限制力。
依据这种3T1R 冗余并联构造设计的3D 打印机器人具备2 个或2 个以上的末端执行器(动平台),且这些末端执行器的运动轨迹基本一致。如果想要并联构造更为紧密,可以将{-R}改为U 副,沿水平坐标平移转动6 自由度并联构造,运动支链如表2 所示。

表2 各运动支链运动副的构成(绕X 轴转动)
1.3 3D打印并联机器人
设计一种共用驱动、多输出、具有多个动平台的3D 打印冗余并联机器人,需要借助在同一个驱动上增加运动轨迹基本一致的运动支链,达到一次打印多个产品的目的。机器人具体的动平台数(输出数)设为6,其中包括驱动关节和动平台。这种状况下,可以利用与驱动平台相对应的驱动关节,获得2 个运动轨迹基本一致的动平台;关节能够同时驱动2 条支链,而部分关节需要利用丝杆或同步带使2 个关节的运动轨迹保持一致。整体设计由支架,工作台,末端执行器,驱动支链,电机,打印喷头,同步带,滑轮组成。
2 实验与效果分析
为了节省生产成本,设计的多输出、多维度3D 打印冗余并联机器人实验样机多维模型具备2 个输出,且以3D 打印并联机器人为分析对象,为了更加直观的检验实际应用效果,特与传统3D 打印机器人设计进行对比,对其打印精度进行比较。
2.1 实验准备
为保证实验的准确性,将两种机器人设计置于相同的试验环境之中,在保证其他条件不变的前提下进行打印精度对比试验。
2.2 实验结果分析
实验过程中,通过两种不同的机器人设计同时在相同环境中工作,分析其打印精度的变化。效果对比如图1 所示。
根据实验对比结果可知,多输出、多维度3D 打印冗余并联机器人与传统打印机器人相比,在打印精度上占有优势,随着打印时间的延长,其精度波动比较小,产品质量之间的差异比较小。
3 结束语
分析多输出、多维度3D 打印冗余并联机器人设计与实现,根据3D 打印的操作难点,以多输出、多维度为出发点,对3D 打印冗余并联机器人进行设计。实验论证表明,本文设计的方法具备一定的有效性。
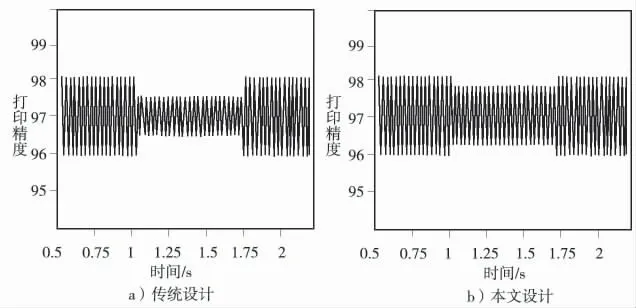
图1 实验对比结果
猜你喜欢
宝钢技术(2022年4期)2022-12-23
机械管理开发(2022年5期)2022-07-07
机械制造(2022年3期)2022-04-07
潍坊学院学报(2021年2期)2021-07-22
上海大中型电机(2020年1期)2020-03-27
中国核电(2017年1期)2017-05-17
汽车科技(2015年1期)2015-02-28
北京航空航天大学学报(2014年1期)2014-12-19
振动、测试与诊断(2014年4期)2014-03-01
中国机械工程(2012年15期)2012-07-25