
直线电机气隙在线检测系统设计与实现
2020-03-02 14:51陈晓亮朱佳伟朱凌祺
现代城市轨道交通 2020年2期
陈晓亮 朱佳伟 朱凌祺

摘 要:为解决直线电机气隙人工检测中存在的检测效率低、检测数据不精准等问题,设计了一种基于激光位移传感器的气隙在线检测系统。该在线检测系统的硬件包括车轮轴位传感器、车号识别装置、可编程逻辑控制器、激光位移传感器等;系统的软件包括数据采集单元、数据处理单元和Web发布单元;系统完成后,进行了实际现场运行试验,结果证实系统的精准性和稳定性能够满足运营检修需求。
关键词:地铁;直线电机;气隙;激光传感器;动态检测
中图分类号:TP277;U264.1+4
直线电机地铁具有众多优点,例如较强的爬坡能力、可促使轨道交通系统小型化、可通过较小半径曲线等,但其气隙间距较难控制,这也是阻碍直线电机轨道交通发展的最大原因[1]。运行能耗与直线电机气隙间距有着紧密的联系,如果直线电机气隙间距过大,在同等列车动力下所需励磁电流也较大;如果气隙间距过小则容易发生电机刮擦,导致电机烧毁,甚至造成安全事故,影响地铁正常运营。因此,国内外各大地铁公司非常注重直线电机气隙间距的控制。由于气隙间距需动态测量,且受到众多因素干扰,例如磁场干扰、现场环境等,因此,动态检测难度较大[2]。
传统气隙间距测量的方式是手工测量,该方法测量强度较大,且存在较大的人工误差,同时无法对气隙间距进行动态检测,因此,对突发性事件无法预知。国防科技大学吕梁学者提出了一种基于电涡流法的直线同步感应电机气隙检测方法[3],该方法需要在轨枕上方安装2个检测线圈且分别对准直线电机齿槽位置,通过电涡流传感器检测线圈的等效电感,利用检测线圈电感与直线电机气隙一一对应的关系,实现直线电机气隙间距自动测量,但实际列车运行环境受振动等因素影响,线圈无法精准地对准齿槽的位置,因此,无法精准地测量电机气隙间距。国内地铁工程师王保坚于2009年提出将激光技术应用于车辆直线电机气隙测量的想法[4],但由于在关键技术上遇到了较多的困难,该想法并未能在工程上实现。
综合上述思想,本文提出一种基于激光位移传感器的气隙在线检测系统,可以进行气隙间距的实时测量,并向运营维修部门提供列车实时的运行状态,保证列车安全运行以及给电机维修提供科学依据。
1 系统总体结构
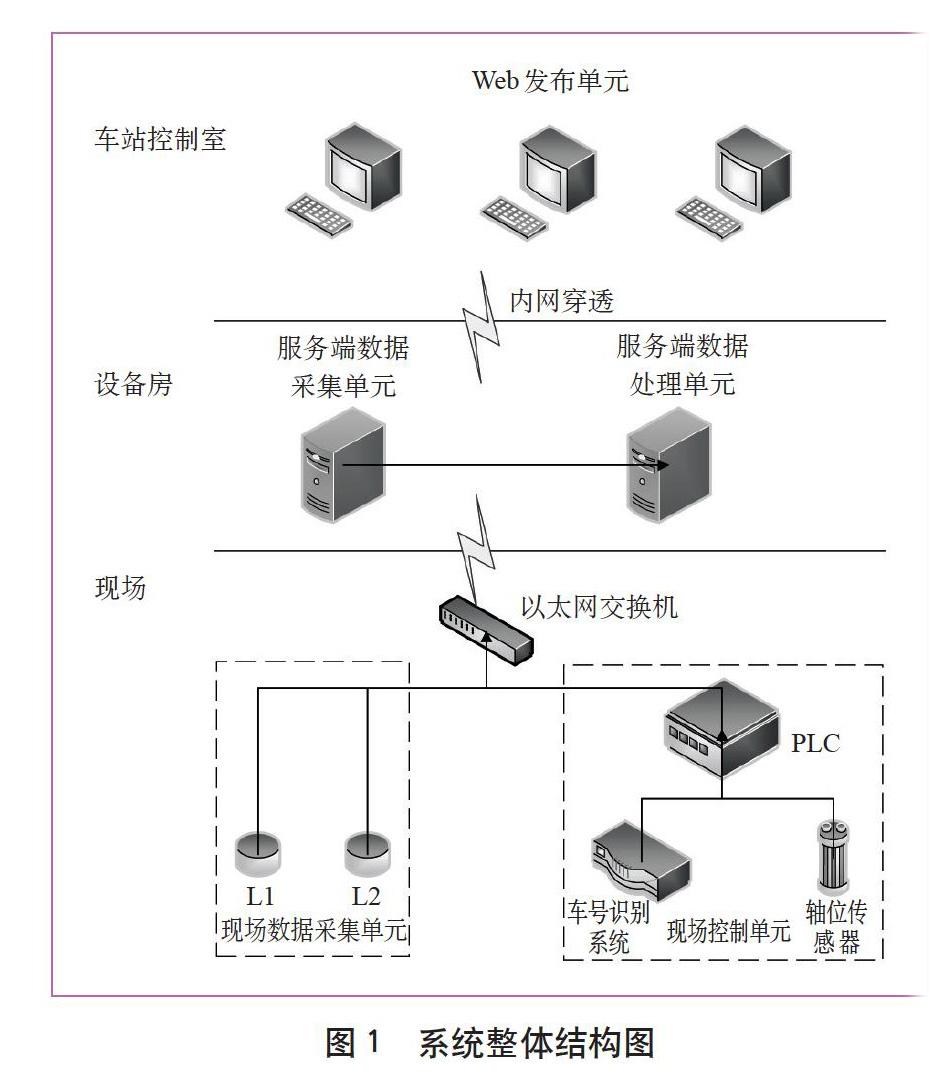
系统整体结构如图1所示(PLC为可编程逻辑控制器)。气隙在线检测系统分为现场控制单元、现场数据采集单元、数据传输单元、数据存储单元、数据处理单元和Web发布单元。
现场控制单元负责实时控制现场数据采集单元和提取车号信息。现场数据采集单元负责气隙数据的高速采集。数据传输单元将采集的数据通过TCP/IP[5]协议传输至存储服务器。数据存储单元负责存储原始气隙数据和经过特定算法处理后的气隙数据。数据处理单元通过特定算法处理原始气隙数据。Web发布单元将处理后的气隙数据以图表的形式动态显示,并实现实时监控报警、行车报表查询、数据趋势分析、阈值设定、设备状态查询等功能。
2 硬件系统设计
直线电机气隙在线检测硬件系统中包含现场控制单元和现场数据采集單元。设备安装布置如图2所示,沿列车运行方向传感器布置分别为车轮轴位传感器、车号识别天线、激光位移传感器。其现场设备安装图如图3所示。
2.1 车轮轴位传感器
车轮轴位传感器主要负责列车定位,该传感器是基于电磁感应原理实现的。当列车车轮接近轴位传感器时,传感器输出高电平,并触发PLC模块告知数据采集软件开启数据高速采集。
根据系统需求,本系统选择图尔克公司型号为NI50U-CK40-VP4X2-H1141的传感器作为车轮传感器,该传感器封装性好,安装简单,具有良好的抗振性、较强的抗干扰性和耐候性,能够适应城市轨道交通线路上的各种恶劣环境。
2.2 车号识别系统
车号识别系统[6]是指在列车车底安装的固定车号信息的电子标签,以及在站点特定位置安装的地面自动识别装置。当列车通过地面自动识别设备时,该列车的车号信息被自动识别并通过RS485串口传至PLC进行车号信息提取,为系统其他单元提供车辆信息。车号识别系统示意图如图4所示。
根据系统需求,选择深圳国宇源创的铁路车号自动识别装置,型号为GYYC900型,该装置是基于射频信号和空间耦合原理的自动识别技术实现的,具有体积小、质量轻、安装简便等优点,非常适合城市轨道交通线上的各种恶劣环境。
2.3 激光三角反射式位移传感器
现场数据采集单元通过激光位移传感器实现数据实时采集,传感器是基于激光三角法进行数据采集。激光三角法测量分为直射式与斜射式,直射式适合散射性好的测量物体表面,斜射式测量适合测量表面比较光滑的物体[7-8]。
根据系统需求,本系统选择型号为optoNCDT 2300的德国米铱激光测距传感器作为现场数据采集单元硬件设备,该传感器是基于斜射式激光三角法进行数据采集。激光位移传感器安装示意图如图5所示。
2.4 可编程逻辑控制器
在本检测系统中,PLC的主要功能为开启与关闭系统、处理与传输车号信息、触发脉冲控制激光位移传感器数据采集,选用西门子公司型号为S7200-SMART的PLC作为系统可编程逻辑控制器。该型号PLC是S7-200的升级版,集成了S7-200众多优点,拥有丰富I/O点数的CPU模块,产品配置灵活,拓展方便,同时CPU模块配有以太网接口,可以与计算机进行通信,轻松组网[9]。
3 软件系统设计
检测软件系统主要由3个部分组成:数据采集单元、数据处理单元、Web发布单元,系统软件功能如图6所示。
3.1 数据采集单元
数据采集单元流程图如图7所示。当列车驶入设备安装区时,PLC会接收车轮轴位传感器输出的高电平,同时接收车号识别主机发送的车号信息。PLC收到信号后通过TCP/IP协议将开启数据采集的信号以及车号信息发送给数据采集单元,从而实现数据高速采集。
3.2 数据处理单元
数据处理分为3大部分:数据预处理、提取电机数据和提取齿数据。
数据预处理包括数据角度和高度的校正以及干扰数据的剔除,数据预处理为精准提取各齿数据提供良好的基础。
各电机气隙数据通过阈值差分法获取,利用差分法能够提取每一个电机头尾数据的横坐标,但依然存在局部干扰数据,在本系统中称为“假电机”,即其类似电机形状但点数较少。通过大量过车试验,发现列车均以匀减速形式进站,每个电机采集到的点数至少为3000个,故在提取坐标范围后可通过阈值形式排除假电机,进而精准地提取各电机的采集数据。
为了更精准地提取各电机各齿数据,利用密度聚类分析(DBSCAN)和五点模板匹配法[10-12]进行齿数据的提取。五点模板匹配法是指在局部数据块中利用数据阈值法和高度差分法找到第1个完整锯齿状图形。该方法设计思想来源于列车车底的实际情况,经现场考察,发现列车直线电机初级的第1个齿必须上升沿阶跃。设计该方法的目的是为了精准地找到第1个齿和最后1个齿,其原理示意图如图8所示。
在设置合理的邻域距离阈值和邻域中样本个数的阈值情况下,利用密度聚类算法能精准地提取密集数据块。提取后的数据块还需结合齿的特性和个数并结合五点模板匹配法,才能精准地提取电机每一个齿的具体信息。经密度聚类算法提取后的效果图如图9所示。提取齿数据算法流程图如图10所示。
3.3 Web发布单元
气隙Web发布单元包括5个模块,分别为:用户中心模块、行车报表模块、故障报表模块、数据分析模块和系统管理模块。
Web发布单元从开发的角度可分为后台服务端(后端)和前台显示端(前端),其中后端是基于Spring Boot、Mybatis和MVC框架实现[13],前端使用HTML5和CSS3搭建静态网页,并利用AngularJS和Highcharts框架开发所需功能[14],前、后台端采用RESTful架构方式进行数据交互[15]。Web发布单元如图11所示。
4 现场试验与分析
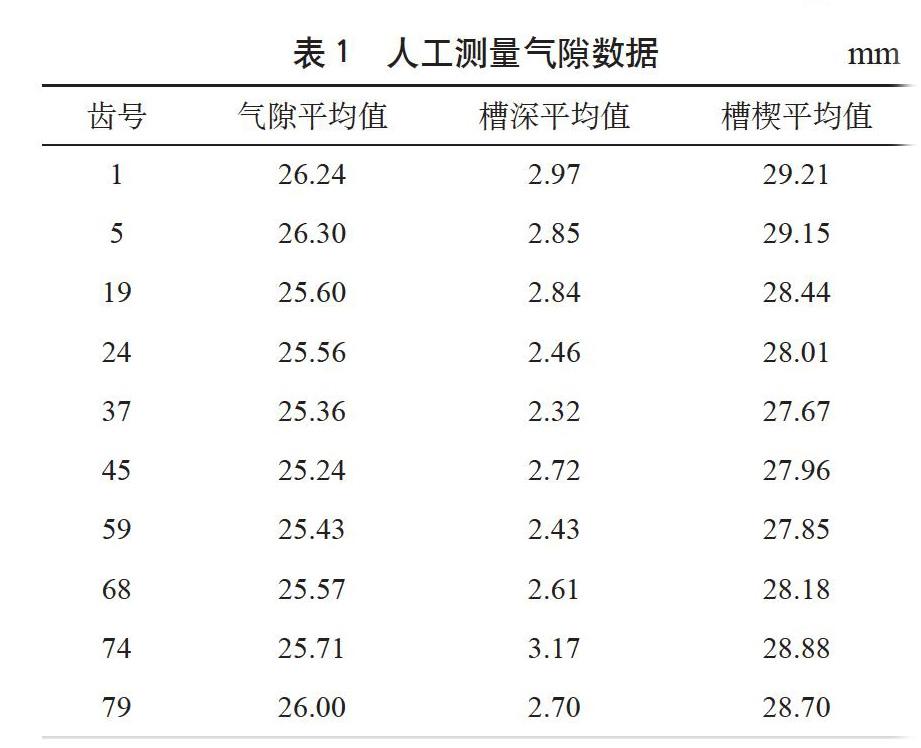
为了验证系统测量的精确性和可靠性,2018年5月4日在安装点进行现场试验,选取指定列车2号电机的特定齿作为动态检测对象,采集10次过车的数据,并与标准值进行对比。由于过车车辆电机气隙数据没有绝对的标准值,气隙间距仅依靠人工进行测量,因此,为降低人工测量误差,要求测量员在测量过程中对同一个齿进行3次测量,并取其平均值作为最终标准值,现场人工测量电机气隙数据如表1所示,在线检测系统测量气隙数据如表2所示。
由表1、表2可知,10次系统测量与人工测量平均偏差均在0.2 mm之内,说明系统测量具有很好的稳定性,同时气隙、槽深和槽楔的最大偏差值均在0.2 mm之内,说明所研究的检测系统具有较高的测量精度,完全满足现场检修要求。
广州地铁于2019年9月委托广州计量院对本文设计的气隙在线检测系统进行了功能和性能测试,测试地点为广州地铁飞沙角站。功能测试内容为系统各部分间相互作用,测试结果为正常;性能测试的内容包括:①静态测量标定架的阶梯尺寸;②动态重复性测试,对同一列车的直线电机的气隙值分为上行和下行进行多次测量,并比较几次测量的重复性。测试结果表明,本文设计的气隙在线检测系统测量误差均满足系统指标±0.3mm的要求。
5 结束语
本文提出一种基于激光位移传感器的直线电机在线气隙检测系统,能够实现精准可靠地检测直线电机气隙的间距,同时完成数据存储与数据可视化功能。经现场试验证明,该系统的测量精度完全满足测量误差要求且系统测量优于人工测量。因此,本文提出的基于激光位移传感器的直线电机在线检测系统能够取代工人手动测量,减轻测量劳动强度,为列车直线电机的维修和调整提供科学依据。
参考文献
[1]戴斌,李肖肖,王穗生,等. 广州地铁6号线直线电机列车牵引能耗研究[J]. 机车电传动,2016(3):92-94,105.
[2]杨雄,张凤阁,王秀平. 轨道交通用初级永磁型直线电机电磁特性分析[J]. 电气工程学报,2018,13(5):1-7.
[3]吕梁,樊树江,吴峻. 基于电涡流法的直线同步感应电机气隙检测[J]. 兵工自动化, 2005, 24(6):84-85.
[4]王保坚. 激光技术在车辆直线电机气隙测量中的应用[J]. 电气化铁道,2009(3):40-42.
[5]Wang Junsheng, Yang Guanghong. Data-driven methods for stealthy attacks on TCP/IP-based networked control systems equipped with attack detectors[J]. IEEE Transactions on Cybernetics, 2019,49(8):3020-3031.
[6]王崢,胡宾,牛孟杰,等. 基于射频识别技术(RFID)的铁路车号自动识别程序[J]. 电脑编程技巧与维护, 2015(8):106-108.
[7]黄世瑜,唐林,施尚英. 基于激光传感器的电子测量装置设计与实现[J]. 激光杂志,2018(2):81-84.
[8]严索,李顶根,于召亮. 三角法激光位移传感器的参数优化设计与分析[J]. 电子测量技术, 2012,35(10):21-24.
[9]杨军. 基于PLC的大型基础环境模拟试验室温度控制系统的设计[D]. 江苏南京:南京理工大学,2017.
[10] 谢娟英,高红超,谢维信. K近邻优化的密度峰值快速搜索聚类算法[J]. 中国科学:信息科学,2016,46(2):258-280.
[11] Xu Xiaohua, Ju Yongsheng, Liang Yali, et al. Manifold density peaks clustering algorithm[C]// Third International Conference on Advanced Cloud & Big Data. IEEE,2015:311-318.
[12] Chen Zhihua, Guo Jjianming, Liu Qing. DBSCAN algorithm clustering for massive AIS data based on the hadoop platform[C]// International Conference on Industrial Informatics-Computing Technology, Intelligent Technology, Industrial Information Integration(ICIICII). 2017:25-28.
[13] Suryotrisongko H, Jayanto D P, Tjahyanto A. Design and development of backend application for public complaint systems using microservice spring boot[J]. Procedia Computer Science,2017(124):736-743.
[14] Viknes Balasubramanee, Chathuri Wimalasena, Raminder Singh, et al. Twitter bootstrap and AngularJS: Frontend frameworks to expedite science gateway development[C]// IEEE International Conference on Cluster Computing. 2013:1.
[15] Mark A Miller, Terri Schwartz, Brett E Pickett, et al. A RESTful API for access to phylogenetic tools via the CIPRES science gateway[J]. Evolutionary Bioinformatics,2015(11):43-48.
收稿日期 2020-01-13
責任编辑 冒一平
猜你喜欢
红领巾·探索(2020年2期)2020-05-19
中国电子报(2019年54期)2019-10-24
电脑报(2019年10期)2019-09-10
时代英语·高一(2019年1期)2019-03-13
中学物理·初中(2017年8期)2018-03-06
小学生导刊(低年级)(2017年2期)2017-06-10
小天使·六年级语数英综合(2017年5期)2017-05-27
航空模型(2016年1期)2016-03-01
股市动态分析(2015年24期)2015-09-10
新高考·高一物理(2015年5期)2015-08-18
