
基于可压缩可拆卸太阳能智能垃圾桶的研究①
2020-03-02 06:26李烯胡勇袁涛
科技创新导报 2020年32期
李烯 胡勇 袁涛
(西南石油大学工程训练中心 四川成都 610500)
目前,国内人口数量庞大,垃圾桶分布广泛,不利于人工集中清理运输和维护,且垃圾桶需求大。而传统的垃圾桶功能形式单一,功能性无法满足垃圾分类需求,空间利用率低,垃圾不能真正投放与回收[1]。随着人们生活质量的提高和科技的进步,智能垃圾桶应势而生,智能垃圾箱的性能和价格优于其他同类产品,彻底取代传统的手动垃圾箱的繁杂,技术领先,对社会富余劳动力,智能垃圾箱作为生活必需品属于循环消费,特定的市场优势使它研究价值很高[2]。由于垃圾智能管理系统的设计比较专业,已有的智能垃圾桶造价高、布线繁琐、功能不稳定等原因没有被广泛使用。为了解决以上存在的问题,我们设计一种新型实用的太阳能智能垃圾桶,不仅具备了传统垃圾桶投放垃圾的功能和智能垃圾桶的特点,也弥补了一些智能垃圾桶的不足,提高了环卫工人的工作效率,同时节约了成本,真正做到了节能环保。
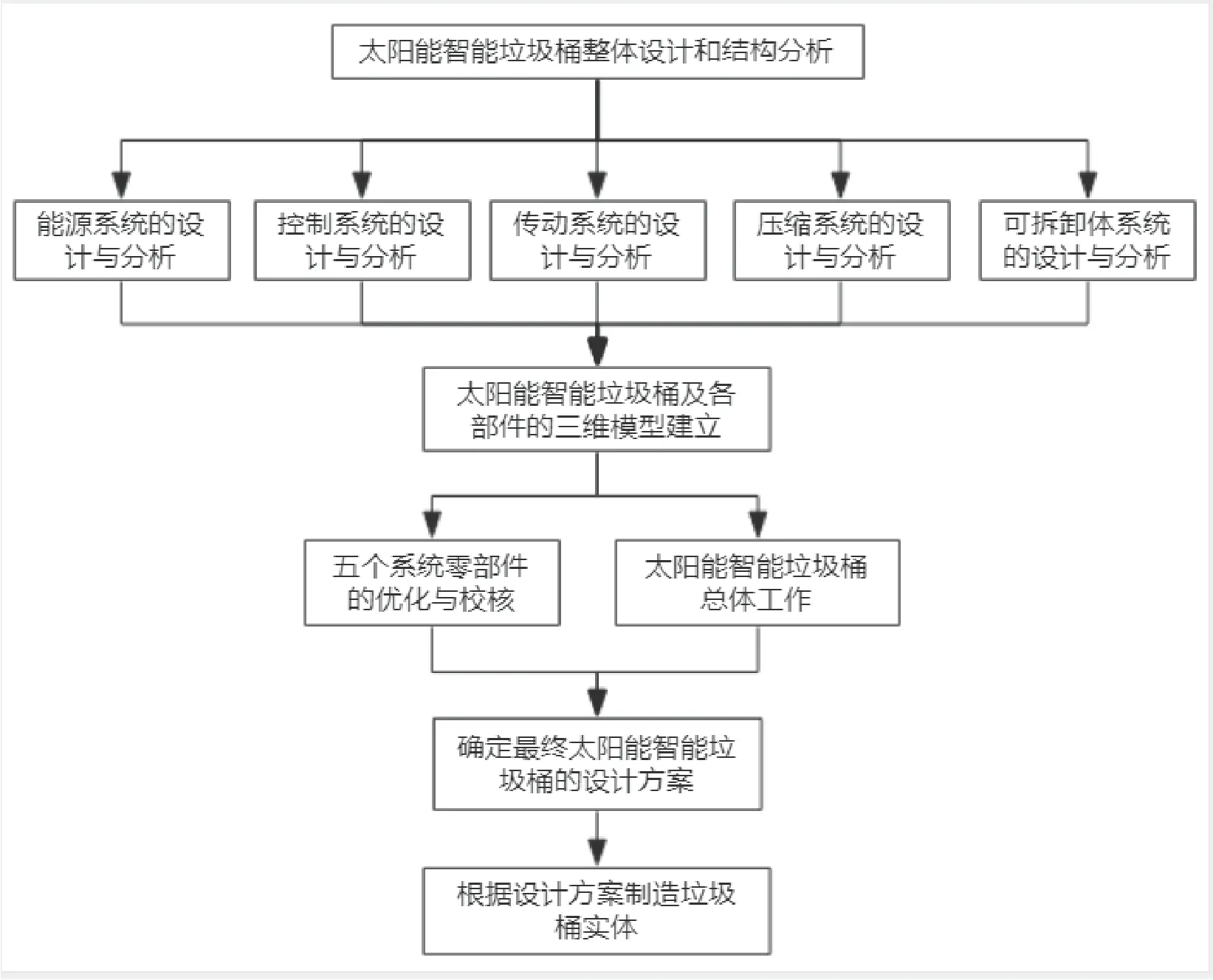
图1 实际设计流程图
1 工作原理
一种以电动剪式压缩机构为主要工作系统的智能垃圾桶,其主要结构包括有:太阳能板、太阳能控制器、红外线传感器、信号处理器、蓄电池、电机、剪式结构、活动门、可拆卸体等,上述结构组成了该垃圾桶的五大工作系统:能源系统,控制系统,传动系统,压缩系统和可拆卸体系统。五个系统相互配合工作使垃圾桶的正常工作运行智能统一并且更加高效[3]。
智能垃圾桶依靠信号处理器给各系统下达工作的指令,利用红外线传感器、压缩系统和可拆卸体之间的配合进行主要工作。当红外线传感器检测到垃圾桶主箱体内桶装满时,信号处理器会接受到信号并发出指令使齿轮电机运行带动垃圾桶顶盖下降盖住垃圾投放口,目的是防止垃圾桶在进行压缩工作时有垃圾被误丢入垃圾桶主箱体内桶之外的地方,造成垃圾桶故障,垃圾桶顶盖下降时,可拆卸体活动挡板同时打开。顶盖与活动门都就位后,压缩系统开始工作,电机传动带动剪式结构的工作,左侧压缩装置将垃圾压缩到右侧后,前部右方的压缩装置再将垃圾推入可拆卸体腔体内,接着可拆卸体内的压缩装置将可拆卸体的内部活动腔体运送到可拆卸体固定挡板一侧,然后前部右方的压缩装置复位、左侧压缩装置复位,最后活动门复位、垃圾桶顶盖复位,垃圾桶完成一次压缩工作。下一次压缩时,少去“可拆卸体内的压缩装置将可拆卸体的内部活动腔体运送到可拆卸体固定挡板一侧”这一步,其余整个过程与第一次压缩工作过程一致,两次压缩工作完成后,可拆卸体腔体便满载了。可拆卸体腔体满载后由信号处理器将信息发送至工人手机,可拆卸体即等待被处理和更换。新拆卸体未更换之前,若垃圾主箱体垃圾再次满载,则进行第三次压缩工作,第三次压缩工作与第二次压缩工作相比,少去活动门开与关这两个步骤,其余整个过程与第二次压缩工作过程一致。
2 系统的结构设计
一种可压缩可拆卸的太阳能智能垃圾桶,是由能源系统、控制系统、传动系统、压缩系统、可拆卸体系统组成,其五个系统结构特征为:
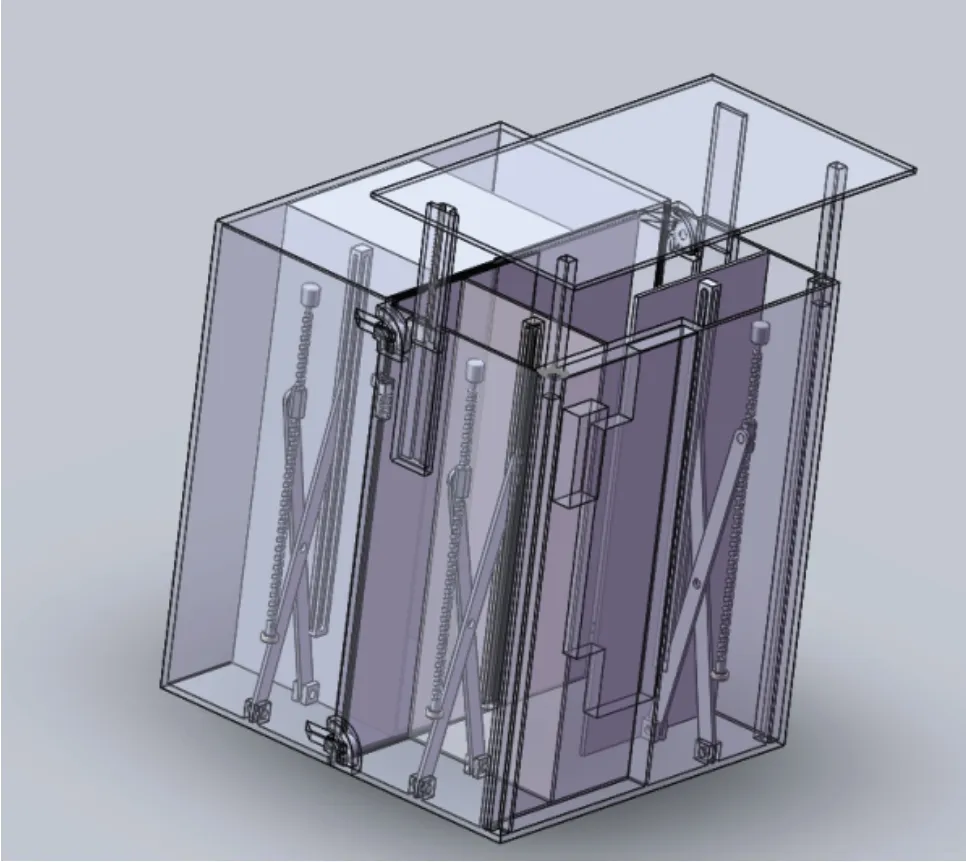
图2 整体结构示意图
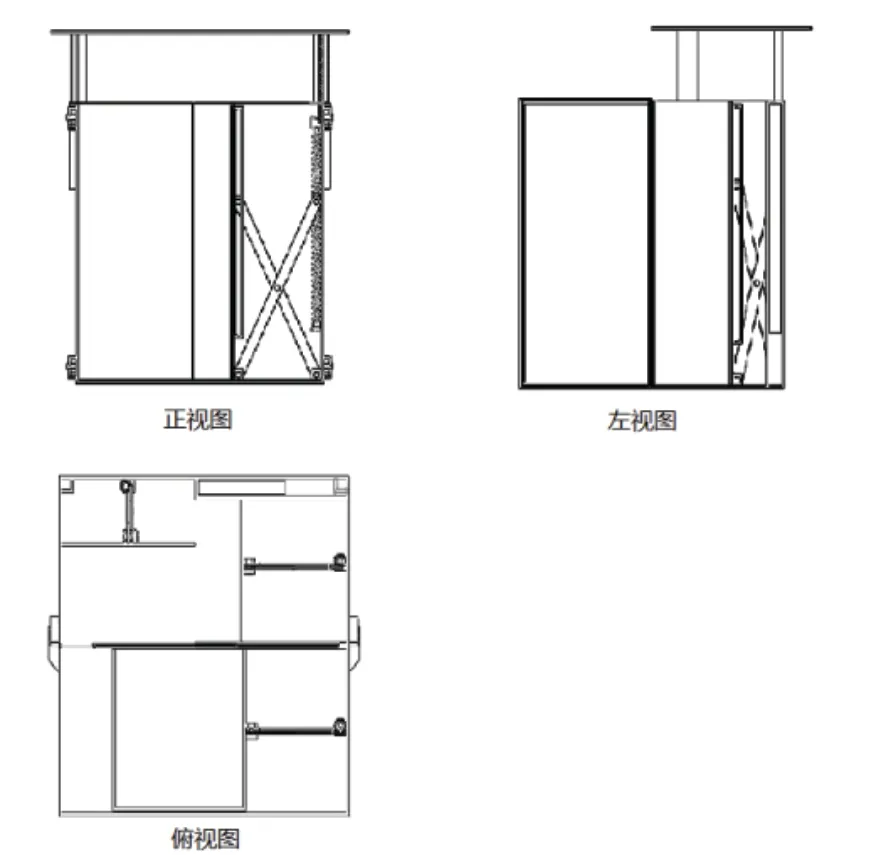
图3 垃圾桶结构三视图
(1)能源系统是由太阳能板、垃圾桶顶板、太阳能控制器、方形支撑柱、“凸”字形支撑柱、蓄电池组成,太阳能板安装在垃圾桶顶板上方,垃圾桶顶板与三根方形支撑柱和一根“凸”字形柱相连接。太阳能板通过导线与垃圾桶箱体内的太阳能控制器、蓄电池连接,垃圾桶前部的小方形柱内部中空,方便导线从顶板联通到垃圾桶内部。蓄电池通过垃圾桶内部线路与红外线传感器、信号处理器、电机相连。另外,蓄电池还通过导线连接了位于垃圾桶主箱体后部的弹簧插座,弹簧插座可与可拆卸体的固定插头配合,蓄电池可通过此配合给可拆卸体压缩系统供电。
(2)控制系统是由红外线传感器、太阳能控制器和信号处理器配合构成。主箱体外箱前部箱口檐左下方安装有红外线传感器,红外线传感器下方安装信号处理器。主箱体外箱左下方最底部安装有蓄电池与太阳能控制器。信号处理器包含有微电脑控制芯片,处理红外线传感器数据、系统状态、电机运作、通信等任务[4]。
(3)传动系统是由“凸”字型柱、电机齿轮、齿条、电动推杆、固定挡板、活动挡板组成。“凸”字型柱“凸”字下半部分处在垃圾桶主箱体外箱外部,“凸”字上半部分处在主箱体外箱内部,处在内部的凸字型柱的下半部分上安装有齿条,电机齿轮与齿条啮合。垃圾桶主箱体外箱后部左边安装双层固定挡板,右边安装单层活动挡板,单层活动挡板与双层挡板过盈配合,活动挡板可向左滑动至双层挡板间的间隙内。主箱体的活动挡板右端有卡条,可拆卸体的活动挡板右端有卡条卡槽,卡条卡条卡槽配合,实现两处活动挡板联动的功能。垃圾桶主箱体外箱左后部安装电动推杆,电动推杆与活动挡板连接。
(4)压缩系统由杆、丝杆、螺母、轴承、电机、导轨、活动挡板共同组成。电机转轴上安装有一根丝杆,两根杆一端连接丝杆,两根杆中部可旋转地固定连接,形成剪式结构,其中一根杆的一端固定在垃圾桶外箱上,固定住可旋转,另一端端末设置有轮子,轮子一端在对应的活动挡板上设置有导轨,轮子与导轨相配合;另一根杆一端固定在活动挡板上,固定住可旋转,另一端末有螺母,螺母与丝杆配合安装,丝杆始端与电机连接,丝杆末端与轴承连接,轴承固定安装在箱体上。压缩机构共有3个,一个位于主箱体外箱前部右方,一个位于主箱体外箱左侧,一个位于可拆卸体左侧。主箱体外箱内部压缩机构的电机和轴承均固定于垃圾桶外箱上;可拆卸体内左部的压缩装置剪式结构的两端分别与丝杆和可拆卸体箱体相连,另外两端与可拆卸体内部活动腔体相连。
(5)可拆卸体系统外部安装有4个轮子,左端前部中间位置有一固定插头;内部有压缩装置和活动腔体,压缩装置与活动腔体相连,可拆卸体左前部有双层固定挡板,右前部有单层活动挡板,单层活动挡板与双层固定挡板过盈配合,活动挡板可向左滑动至双层挡板的间隙内。轮子的直径与垃圾桶主箱体外箱的导轨内径相同,使外箱体与可拆卸体之间配合连接。
3 系统工作实施方式分析
智能垃圾桶各系统的零件和结构布局基本确定,其各系统的具体实施方式如下:
(1)在能源系统中,位于垃圾桶顶板上的太阳能板将收集到的太阳能通过隐藏在小方形柱内的导线输送到太阳能控制器当中,由太阳能控制器对能量进行整理后再输送到蓄电池中,最后由蓄电池通过导线将能量输送到各个用电装置中,蓄电池保证垃圾桶的随时供电。此外,蓄电池还可通过可拆卸体固定插头与主箱体带弹簧插座的配合将电能输送到可拆卸体压缩装置中。
(2)在控制系统中,红外线传感器实时对垃圾桶的状态进行检测,若发现垃圾满了,便将信号发送至信号处理器,信号处理器便控制传动系统下降垃圾桶顶板并打开垃圾桶外箱活动挡板,再控制压缩装置运动把垃圾进行压缩和运送到可拆卸体内储存,再控制垃圾桶顶板打开和垃圾桶外箱活动挡板关闭,准备下一次压缩和储存。当可拆卸体装满或系统出现故障时,则发信息告知工人更换可拆卸体或进行维修,若只是可拆卸体满载,则还可以进行一次主箱体内的压缩。
(3)在传动系统中,齿轮电机转动,带动齿轮旋转,齿轮带动齿条的移动使垃圾桶顶板升降[5]。电动推杆工作带动垃圾桶主箱体外箱活动挡板移动,垃圾桶主箱体外箱活动挡板移动时,会因为主箱体活动门和可拆卸体活动挡板之间的卡条卡槽配合带动可拆卸体活动挡板的同时移动。
(4)在压缩系统中,压缩系统的电机连接的丝杆上固定有剪式结构的两端,电机转动带动丝杆转动,丝杆转动带动剪式结构的压缩或拉伸。主箱体左侧压缩装置首先运动将垃圾压缩到右侧,主箱体前部右方的压缩装置再进行运动,将垃圾运送到可拆卸体的活动腔体内,可拆卸体内的压缩系统又将垃圾从左部运送到右部,然后前部右方的压缩装置复位、左侧压缩装置复位、活动门复位、垃圾桶顶盖复位,所有结构全部复位后,压缩工作完成,准备下一次压缩[6]。
(5)在可拆卸体中,首次压缩垃圾时,垃圾桶主箱体外箱的活动挡板和可拆卸体活动挡板组成的活动门首先打开,可拆卸体剪式结构处于拉伸状态,活动腔体位于可拆卸体活动挡板一侧,垃圾桶主箱体的压缩后的垃圾运送到腔体内后,剪式结构进行收缩,将活动腔体移动到可拆卸体固定挡板一侧,留空可拆卸体活动挡板一侧,保证本次压缩垃圾不泄露的同时,给下次压缩垃圾的进入留出空间,然后可拆卸体活动挡板向右滑动到最大位置关闭,下一次压缩垃圾时,两活动挡板组成的活动门打开,垃圾被送到可拆卸体活动挡板一侧,后活动门关闭,此时可拆卸体储存两次的压缩垃圾,达到满载状态。在进行更换时,可拆卸体通过轮子在主箱体的导轨上移动即可实现可拆卸体与主箱体的拆卸与配合的功能,工人处理起来更加方便快捷,并且可拆卸体上的固定插座与主箱体上的弹簧插头的配合方式更加方便主箱体与可拆卸体之间的拆卸与配合。
4 设计新型压缩装置
当垃圾桶的垃圾满了,只有人工及时清理之后才能垃圾桶继续正常使用,因为垃圾桶里面大多是纸类,软塑料类等可压缩物品,这些东西放在里面很占用了垃圾桶的空间,降低垃圾桶的储存率;虽然现在已经有可以压缩垃圾的垃圾桶,但这些垃圾桶机构比较复杂,成本较高,不利于这一类垃圾桶的普遍使用。为此我们设计用两根中部旋转固定的连杆组成剪式结构,电机连接的丝杆上固定剪式结构一侧的两端,另一侧一端固定在挡板上,一端在挡板上可活动。电机转动带动丝杆转动,丝杆转动带动剪式结构的压缩或拉伸,剪式结构的压缩和拉伸推动挡板实现垃圾桶压缩垃圾和复位的功能[6]。当红外线传感器检测垃圾桶内桶装满时,其压缩系统就可开始工作;当不工作时剪式结构处拉伸状态,空间占有率小。其采用剪式压缩的方法,整个压缩装置结构简单,成本较低,易于维护,在不占用垃圾桶的空间的同时,又可实现压缩垃圾的诉求,大大提高了垃圾桶的垃圾储存率。
5 增加可拆卸体
由于垃圾桶分散范围大,工作人员清理维护这些垃圾桶时成本就很高,增加储存率降低清理频率是一个降低成本的行之有效的方法,于是我们在通过压缩垃圾提高储存率的同时增加了可拆卸体这一创新性元素进一步提高垃圾桶的储存率,有了可拆卸体,垃圾桶可以再多储存两次压缩垃圾。主箱体可拆卸体外部有4个轮子可与外箱的4个轮子导轨相配合,可拆卸体左端前部中间位置有固定插头,固定插头的位置与主箱体主箱体弹簧插座的位置相对应,可拆卸体与垃圾桶主箱体之间通过活动挡板配合,其可拆卸体内也设计一压缩机构对垃圾进行处理,当可拆卸体满时就会由信号处理器发送信息至工人手机等待更换。在轮子和导轨的配合下,实现了垃圾桶可拆卸体与主箱体的快速组装或拆卸,可拆卸体的轮子设计还能保证运输方便,解决人工倾倒的不便。
6 容量检测与能源设计
在智能垃圾桶上端安装红外线感应器, 通过红外线感应技术,不仅测量范围广,而且响应时间短,实时感应垃圾状态。信号处理器采用微机控制芯片,是一种工作性能高、耗电低、稳定的微控制器集成电路,自动控制各系统的工作,向工人的手机发送信息,进行垃圾箱的收集和维护工作。系统的能源是新能源供给,使用太阳能电池供电,降低环境污染,内部内置有锂电池,太阳光照射后可以储存来自太阳电池面板的电能[4-6]。
7 实物设计图
根据系统的结构完成对垃圾桶的Solid Works模型设计,整体设计流程如图1所示,具体见图2和图3。
8 结语
本文设计了一款利用剪式结构自动压缩垃圾、可拆卸体增加存储率、太阳能充电及蓄能、容量自动检测的垃圾桶,可以大大地提高垃圾储存率,提高垃圾运输效率,减少垃圾倾倒的次数又便于维护,节省了人力财力。这样一个经济、环保的智能垃圾桶放在城乡街道和社区不仅方便了大家,也维持了环境的整洁干净[3]。
猜你喜欢
橡塑技术与装备(2022年10期)2022-10-03
华南理工大学学报(自然科学版)(2022年3期)2022-04-29
有色金属材料与工程(2021年4期)2021-11-27
工程力学(2021年5期)2021-05-25
科学与生活(2021年33期)2021-03-26
橡塑技术与装备(2021年2期)2021-02-01
成都信息工程大学学报(2019年6期)2019-08-13
现代兵器(2017年4期)2017-06-01
西北工业大学学报(2015年4期)2016-01-19
制造技术与机床(2012年6期)2012-01-27
