面向斜拉桥索塔巡检的旋翼UAV避障航迹规划
2020-02-27 12:34闫茂德李超飞
计算机测量与控制 2020年1期
徐 伟,闫茂德,赵 煜,朱 旭,李超飞
(1.长安大学 电子与控制工程学院,西安 710064; 2.长安大学 公路学院,西安 710064)
0 引言
近年来,因各种原因导致的桥梁巡检不到位、不及时而遗留的桥梁安全隐患,正逐步成为导致桥梁安全事故发生的主要原因。斜拉桥索塔作为斜拉桥的主要组成部分[1],因其高耸的结构,给桥梁管养人员对其进行巡检带来了诸多不便。因此,越来越多的桥梁管养人员开始借助旋翼UAV这一新型工具进行索塔巡检[2-3]。但是,目前旋翼UAV进行索塔巡检时全程仍以人为操控为主,巡检效率不高。为更高效的完成索塔巡检工作,提高索塔巡检质量,一种面向斜拉索塔巡检的旋翼UAV避障航迹规划方法需要被提出。
目前,针对无人机的航迹规划问题,常用的方法有基于图论的方法[4]、基于单元分解的方法[5]、基于数学规划的方法[6]。智能进化算法[7-9]等。例如,以凸多边形区域的全覆盖问题为研究对象,陈海等提出了一种"点边式"宽度算法[10],但该方法仅考虑了二维平面环境下的航迹规划问题;方旭等以三维空间中快速航迹规划需求为研究对象,提出了一种基于人工势场的三维航迹规划方法[11],但该方法未考虑区域的覆盖问题,不适用于巡检航迹规划领域;H. Mo等针对桥梁检测的全覆盖航迹规划问题提出了一种基于单元分解和两点搜索全覆盖航迹规划方法[12];文献[13]在考虑桥梁环境障碍物的情况下,基于人工势场法完成了桥梁巡检航迹的规划;袁栋等也为应对桥梁复杂环境中航迹规划的避障要求,基于PIXHAWK和改进人工势场法,提出了适用于桥梁检测的无人机自动避障路径规划方法[14]。然而,上述方法均未提出一种适用于索塔巡检环境下进行航迹规划的方法。
在巡检过程中,旋翼UAV在进行纵向运动和横向运动时的能量消耗是有所不同的。由于旋翼UAV在进行纵向运动时需要克服机体本身重量而做功,使得消耗的能量相比横向运动更多,这便导致了旋翼UAV在做不同方向运动时的能量消耗不同。同时,在索塔巡检环境下,分布着密集的斜拉索,在旋翼UAV即将与斜拉索发生碰撞时,很难采用常规的避障方式,如抬升高度或左右绕飞等方式来躲避斜拉索,这将导致巡检用旋翼UAV的飞行安全无法得到有效保证。如何确保规划的航迹使得旋翼UAV的能量消耗最少,同时兼顾斜拉索的避障,成为了亟待解决的问题。
基于上述讨论,本文提出一种面向斜拉桥索塔巡检的旋翼UAV避障航迹规划方法。该方法以能量消耗最少为目标,并考虑索塔巡检环境下的斜拉索避障问题,能够有效地为索塔巡检规划出安全航迹。
1 问题描述
无人机执行索塔外观巡检是指:利用旋翼UAV搭载的高清云台摄像头在与索塔保持固定距离的条件下,依次对索塔的各表面进行图像采集。通过对无人机采集的图像数据进行分析,桥梁管养人员便可以在较短的时间内对索塔的服役状况进行评估。
在设计航迹规划方法时,需要考虑两方面因素影响。一方面是期望获得的航迹使得旋翼UAV的能量消耗最少。因为受旋翼UAV本身搭载的电池容量或燃油多少限制,旋翼UAV在巡检过程中消耗的能量越少,单次巡检的范围就越大。这就要求航迹规划方法所得的航迹要尽可能的以航迹消耗最少目标,从而提高巡检效率。另一方面,旋翼UAV的飞行安全受到密集分布的斜拉索障碍物影响。不同于常规障碍物的空间分布,索塔的斜拉索有其独特的空间分布特性。如一般条件下,斜拉索间不是绝对的平行关系,各自与桥面呈不同的倾角,且呈前后相邻分布。如图1所示,假设按预定航迹飞行的无人机与索塔斜拉索在C点将可能发生碰撞。因斜拉索空间分布特性的影响,若要将拉索面完全绕过,则可能导致旋翼UAV飞行航迹过于远离索塔,在严重影响巡检效率的同时也会使得图像信息采集不完整。若采用常规的方法驱使无人机在横向做单一的前后平移、纵向做单一的下降或抬升操作,有可能与相邻的斜拉索发生碰撞。图1是旋翼UAV在索塔面遇险情况示意图,图中点C1、C2、C3、C4为潜在的碰撞点。

图1 无人机在索塔面遇险情况示意图
有鉴于以上分析,提出一种以能量消耗为评价航迹优劣指标,同时考虑旋翼UAV的斜拉索避障问题的航迹规划方法,即融合双圆弧避障的航迹规划方法,以解决上述问题。
2 融合双圆弧避障的航迹规划方法
为设计符合问题描述的航迹规划方法,基于两个点对遗传算法进行改进,并提出双圆弧避障策略实现斜拉索的安全避障飞行。
对于遗传算法,考虑高度变化带来的能量消耗不同,引入“高度能量损失因子”μ来构建能量消耗函数,从而设计适应度函数。同时采用信息熵理论描述种群多样性,进而自适应调整交叉和变异概率,防止遗传算法陷入“早熟”。并采用改进后的遗传算法优良的寻优特性求取能量消耗最少的航迹。
基于对斜拉索空间分布特性的研究认识,提出的双圆弧避障算法,对航迹上存在斜拉索障碍的局部区域进行航迹重新规划,使得整个航迹能有效躲避斜拉索障碍的干扰。综上所述,融合双圆弧避障的航迹规划方法其具体执行步骤如下:
1)环境建模。为克服索塔造型各异带来的环境建模难等问题,受三维栅格描述空间环境启发[15],以栅格描述巡检环境,定义每一个栅格代表一个巡检视点。旋翼UAV在每一个巡检视点上进行拍摄时均可确定一个图像采集区域,所有巡检视点集合便构成了对该索塔面的完整描述。
按图2中的方式建立三维空间坐标系,x轴垂直于桥面延伸方向,y轴平行于桥面延伸方向,z轴垂直于桥面方向。以位于坐标原点附近且沿x轴正方向的一侧索塔面建立环境模型,图中每一个小格代表一个巡检视点对该处一个索塔面区域的描述。基于此,建立环境矩阵如下:
(1)
环境矩阵M的每一行,其前3个元素分别为对应的巡检视点的三维坐标。第四个元素为其状态位,表示该巡检视点是否可正常通行,有1和0两种状态,1代表可正常通过,0代表该巡检视点存在斜拉索障碍。

图2 斜拉桥索塔面的环境建模
2)染色体编码与种群初始化。当环境矩阵建立以后进行染色体的编码与种群初始化。为简化三维航迹规划的复杂度,染色体采用可变长度的一维数组进行编码,如下式所示:
Ci=[Node1Node2Node3…Noden]
(2)
式中,Ci为种群中的第i条染色体,Nodei为第i个巡检视点,它映射了环境描述矩阵M中第i个巡检视点的信息。
初始种群采用随机函数生成,随机函数基于环境描述矩阵对巡检视点的描述,生成多条随机染色体,并构成初始种群,以此完成种群的初始化。
3)进行选择、交叉、变异操作。相关算子设计如下:
(1)选择算子:对当前世代以固定大小进行分组。然后,保留每组中适应度排名前百分之三十的个体。若设每代种群的数目为m,每组个体数量为g,通过分组一共产生m/ (g* 30 %)的基染色体,其余m-m/(g* 30 %)个体均由后续的交叉算子、变异算子产生。
(2)交叉算子:为使得染色体中某段较好的巡检视点遍历次序较好地保存下来,按当前种群交叉概率从每组中选择一定数量的染色体进行交叉操作。下面以含8个巡检视点的染色体为例给出交叉规则。设随机算子生成的交叉长度为3,起点为1。因此选取下一组最优个体上{1,2,3}的基因片段,作为改良基因片段。接下来,遍历染色体1,按原次序取出不含该基因片段的其余基因。组成原基因片段。最后,将改良基因片段从起点开始置入新染色体,然后再按顺序填入原基因片段,组成新的染色体。
(3)变异算子:按当前种群变异概率在该世代种群中选择一定数量的染色体进行如下3种方式的变异:
(1)区间翻转算子:将染色体部分区间的巡检视点按逆序重新排列,区间两端的巡检视点顺序不变;
(2)单点互换算子:将位于任意位置的巡检视点进行位置互换;
(3)循环位移算子:在染色体中将染色体某区间段的巡检视点依次循环向右移动一位,区间末位移至区间首位。
4)种群适应度计算。经遗传操作后,对种群中染色体的适应度进行计算。考虑到在移动相同路程的情况下,旋翼UAV在向同一高度的索塔面巡检视点进行飞行时消耗的能量低于向不同高度的巡检视点飞行所消耗的能量。因此,引入“高度能量损失因子”μ来描述高度变化带来的多余能量损失,构建能量消耗函数:
(3)
式中,Wi,j为环境描述矩阵中从第i个巡检视点到第j个巡检视点消耗的能量,xi、yi、zi为第i个巡检视点三维坐标,xj、yj、zj为第j个巡检视点三维坐标,K为单位距离的能量损失系数。
所提航迹规划方法的优化目标为遍历所有巡检视点的总能量消耗最小,可表示为:
(4)
建立第i条染色体所生成航迹的适应度Fi:
(5)
由该式计算染色体适应度,能量损失越小,适应度Fi越大,否则相反。
5)收敛条件判断。经过适应度计算后,若求出的最优解达到指定的收敛条件或者迭代次数达到最大值,则终止迭代,并执行步骤7),否则继续顺序执行至步骤6)。
6)交叉变异概率调整策略。步骤3)中所述的交叉、变异操作均使用固定概率。在极端情况下可能导致迭代找寻的解陷入局部最优的情况。因此,引入信息熵理论描述种群的多样性,并基于种群的多样性对每世代的交叉与变异概率进行调整。若种群多样性低于应有的种群多样性时,原有的交叉、变异概率将得到增大,以提高种群的多样性,避免发生陷入局部最优解或“早熟”现象的产生。所提调整策略设计如下:
定义种群中每条染色体第j个基因位及其所有等位基因上出现第e个巡检视点的概率为该种群中等位基因位上出现第e个巡检视点的次数与种群的个数m的比值。记作pje。则第l世代该基因位的信息熵可表示为:
(6)
当且仅当初始种群个数m与染色体基因总基因位数n相同时,式(6)取得最大值log2m,利用该值构造与种群代数相关的多样性阈值函数为:
(7)
式中,R为调节系数,G为增益因子,l为当前迭代次数,L为总的迭代次数。
定义pfc与pfv分别为初始交叉概率与变异概率,则考虑种群多样性的第l代交叉与变异概率为:

(8)
式中,puc和puv为每单位概率偏差对应的概率调整值。设u为概率偏差衡量系数,偏差衡量函数f(x,y)定义为:
(9)
利用式(7)计算当前世代的种群多样性,由式(8)计算调整后该世代的交叉概率、变异概率。
7)双圆弧避障策略。求出能量消耗最少航迹后,针对航迹中部分区域存在斜拉索障碍的情况,采用双圆弧避障算法进行重新规划。
由图3可知,空间中处于同一高度的两点A1(xA1,yA1,zA1)、A2(xA2,yA2,zA2),中间被斜拉索所隔开,在两点间若沿原航迹飞行,则会在C点处发生碰撞,为得到安全的避障航迹,双圆弧避障算法采用的步骤如下。

图3xoy平面角平分线视角的避障航迹
步骤1:利用空间距离公式得到A1、A2两点的直线距离,记为dA。
步骤2:以A1,A2为起点,向后下方做倾斜角为θmax(θmax为高度最低处斜拉索的倾斜角)、线段长度为dl的空间线段l1、l2。线段l1、l2的终点分别为B1、B2,且有:
(10)
步骤3:以B1、B2为圆心,dA为半径,得到与地面呈θmax角的空间圆,分别记作圆1、圆2。
步骤4:根据空间几何原理,圆1、圆2有且仅有一个切点,联立两圆空间坐标方程,得到切点坐标并将其记为点T(xT,yT,zT)。将A1、T、A2用直线连接得到粗略避障航迹。

(11)
步骤5:在粗略航迹的基础上,利用B样条曲线基于空间点A1,A2,T做拟合,得到一条光滑的曲线,即为躲避A1、A2点间存在的障碍点生成的一条平滑航迹。
8)输出能量消耗最少、且能安全躲避斜拉索障碍物的最优航迹。
综上所述,融合双圆弧避障算法的航迹规划方法流程图如图4所示。

图4 融合双圆弧避障的航迹规划方法流程
3 仿真实验
为验证所提旋翼UAV避障航迹规划方法,利用MATLAB仿真平台对咸阳市渭城桥索塔的巡检进行仿真实验。在进行仿真实验时,所用索塔主要参数如表1所示,设定旋翼UAV飞行航程为1 m时,对应消耗1个单位的能量,高度能量损失因子取3,巡检视点大小为1*1 m2。以与图2处于相同位置的索塔面进行旋翼UAV避障航迹仿真实验,得到旋翼UAV避障航迹如图5所示。
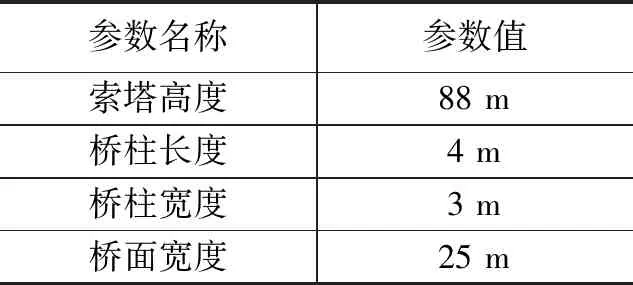
表1 索塔主要参数


图6 旋翼UAV避障航迹局部放大图
图5 面向斜拉桥索塔巡检的旋翼UAV避障航迹
在图5中,给出了对于仿真对象的避障航迹。该航迹的总能量消耗为544.083 2个单位。若按传统的“Z”字型飞行,则飞行的距离为680 m,将消耗680单位的能量。因此可见,在该仿真实例与假设条件下,本文所提方法将旋翼UAV飞行中的能量消耗在传统的“Z”字型航迹的基础上降低了19.99%。
图6为旋翼UAV避障航迹局部放大图,由图可见,经双圆弧避障算法处理,巡检视点间需要经过斜拉索障碍物的航迹得到了重新修正,当无人机沿修正后的航迹进行飞行
时,便能有效地躲避斜拉索障碍,保证了旋翼UAV在进行斜拉索索塔巡检时的飞行安全。
4 结束语
为进行安全、高效的索塔巡检,提出了一种斜拉桥索塔外观巡检的无人机避障航迹规划算法。该方法以能量消耗最少为航迹优劣评价指标,同时重点考虑了索塔环境下的斜拉索避障问题,有效地解决了利用旋翼UAV进行索塔巡检时的图像采集航迹规划问题。仿真实例表明,相比传统的“Z”字巡检航迹,当高度能量损失因子μ=3时本文算法将航迹的能量消耗降低了19.99%;且当遇见斜拉索障碍物时,能够进行有效避障。总之,所提出的航迹规划方法可以有效地确保旋翼UAV进行斜拉桥索塔巡检时的飞行安全,并最大限度减少其能量消耗,在桥梁领域具有广阔的应用前景。
猜你喜欢
体育科技文献通报(2022年4期)2022-10-21
航空学报(2022年9期)2022-10-14
北京航空航天大学学报(2022年7期)2022-08-06
世界地震工程(2022年3期)2022-08-04
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
体育科技文献通报(2022年3期)2022-05-23
城市道桥与防洪(2022年1期)2022-02-25
汽车实用技术(2022年2期)2022-02-21
作文中学版(2020年1期)2020-11-25