
三峡升船机运行控制中闭锁的运用及优化
2020-02-26 06:28:32鄢玲祉郑琴霞
水运工程 2020年2期
鄢玲祉,郑琴霞,李 飞,李 若
(长江三峡通航管理局,湖北 宜昌 443002)
1 运行工艺简介
三峡升船机运行流程主要分为5个环节,以上行为例,分为船厢与下游解除对接、船厢与主体设备解除对接、船厢上行、船厢与主体设备对接、船厢与上游对接。集控操作方式主要分为自动运行、分步运行、手动运行。三峡升船机工艺流程与操作如表1所示。
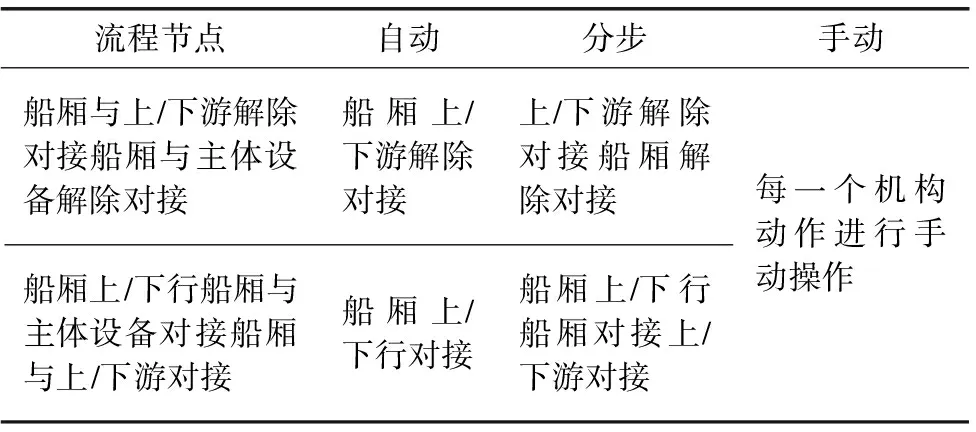
表1 三峡升船机工艺流程与操作(不含调整船厢水深时间)
2 闭锁的作用与影响
2.1 运行控制与闭锁作用
三峡升船机运行工艺流程自动化程度及控制精度较高,工艺流程采用顺序控制方式。流程的各环节有严谨和完善的逻辑关系和保护,各现地控制站的动作必须满足相应的站间闭锁关系后方能动作,即当前一步动作未完成时,下一步动作不能进行。三峡升船机运行控制系统主要包含集控站、流程站、安全站和现地站等,其中现地站是控制系统的作用单元,它包括上下闸首控制站、上下厢头控制站及传动控制站,不仅各站内部设有闭锁条件,而且各站之间也有闭锁保护,形成了一个相互联系相互制约的运行控制系统,现地控制站闭锁关系如图1所示。

注:→箭头指向表示存在闭锁条件约束。
集控模式的3种操作方式闭锁条件要求完全一致,每一个操作命令的下发都需要满足对应的闭锁条件,才能够有效执行。三峡升船机工艺流程有25步,每一步都有一定的闭锁保护,上位机共有50条闭锁,其中上闸首9条、上厢头13条、传动站8条、下厢头13条、下闸首7条,环环相扣,保障运行工艺流程和机构的安全运行。
除了常用的集控操作模式,还有现地和检修操作模式,作为故障处理和特殊操作使用,也有相应的闭锁要求。本文仅对集控流程的闭锁条件进行研究。
2.2 闭锁条件对运行的影响
三峡升船机试通航运行初期,由于闭锁条件不满足而导致的停机故障出现较多,严重影响了运行效率。2017年1—7月,不间断运行厢次、艘次较多,故障典型最能体现初期运行控制状态,7—10月进行了升船机试通航以来第1次大规模停航优化改造,因此选取该阶段运行情况作为分析的原始信息。2017年1—7月试通航期间非闭锁停机和闭锁停机故障见表2。

表2 2017年1—7月停机故障
在此期间,共发生432次停机故障,其中由于闭锁条件不满足导致停机故障122次,相当于每月均有62次停机故障,因为闭锁条件不满足的停机故障18次。经统计,出现频率最高的闭锁停机故障有对接锁定信号丢失、开船厢门、进出厢和调整船厢水深等,其影响及发生情况如表3所示。
自然功率因数是供配电系统未输入无功补偿装置时的有效功率与无功补偿装置输入配电系统后的功率之比。自然功率因数的选择可以有效改善整个动力系统。为了实现这一目标,可以减少线路损耗并减少无功功率和恒定有功功率下的负载电流负载,可以使用改进的自然功率因数无功功率补偿器实现就地补偿。该补偿器可以减少无功功率传输线损耗并实现电气工程中的节能目标,达到电气工程节能的目的[9]。

表3 2017年1—7月常见闭锁停机故障
3 闭锁停机影响的应对方法
上位机的闭锁条件不满足而引起的停机故障大致可以分为:1)水位条件不满足;2)传感检测信号丢失不满足;3)机构执行动作未到位。当闭锁条件不满足时,操作员应以更高效的方法进行操作,减少闭锁丢失导致故障停机的时间,缩短船舶在船厢滞留时间,降低闭锁停机故障带来的影响。下面分别分析试通航运行中出现频率最高的开船厢门、对接锁定信号丢失和调整船厢水深中断3个典型的闭锁停机影响的应对方法。
3.1 闭锁停机应对方法
3.1.1开船厢门动作停止的应对操作
对于水位波动不满足条件引起的闭锁,操作员应了解当日水位变化趋势,对关键水位做到心中有数。当船厢对接时,凭借水位信息系统等手段观察水位变化趋势,提前预判。遇到开船厢门过程中动作停止时,操作员要提醒船方,出厢信号灯变绿以后再解缆出厢,避免提前解缆后因为水位波动导致船舶在船厢来回漂移。应对和操作流程如图2所示。

图2 开船厢门动作停止后集控应对流程
由于水位波动是不可避免的,所以操作员要谨记关键水位数值,提前观察水位,做到防范于未然,才能减少水位波动不满足条件的闭锁停机,提高运行稳定性。常见的与水位波动有关的闭锁条件如表4所示。

表4 闭锁条件中常见的水位值
续表4

动作 子站水位下闸首卧倒门开启下闸首3.4m≤下闸首工作大门槛上水深≤5.95m上闸首卧倒门开启安全站-0.4m≤上闸首与上游间隙水位差≤0.15m下闸首卧倒门开启安全站-0.4m≤下闸首与下游间隙水位差≤0.25m开上∕下厢头船厢门传动站3.3m≤船厢水深≤3.8m上厢头密封框装置退出上闸首3.55m≤上闸首工作大门槛上水深≤7.55m下厢头密封框装置退出下闸首3.48m≤下闸首工作大门槛上水深≤5.75m下闸首工作大门提升∕下降下闸首下闸首底槛水深6.05m船厢上∕下行传动站3.36m≤船厢水深≤3.6m
从表4总结出上位机关键水深节点范围,见表5。

表5 操作员重点关注的水深范围 m
3.1.2对接锁定信号丢失的应对操作
操作员要准确把握是信号不稳定导致丢失,还是机构异常。当发生此类故障时,操作员首先在界面上查看机构状态,现地人员去现场观察开关是否触发,确认无误后,重新发令,使丢失信号到位。若对接锁定信号丢失,船厢长时间处于与航道对接状态,水位呈现上涨趋势致使船厢水深处于较高位(> 3.6 m),导致对接锁定机构受力较大,对接锁定块发生位移,超出机械开关控制行程范围,使锁定信号丢失,可进行如图3的操作。

图3 对接锁定信号丢失集控应对流程
3.1.3调整船厢水深中断的应对操作
调整船厢水深流程中断,此故障发生概率较大的原因是闸首门因水位波动产生较小的向上位移,使卧倒门开到位信号未被触发,所以集控人员观察行程值是否正常,闸首液压油位是否正常,现地人员查看上闸首卧倒门机房内是否正常,都确认无误后,重新发开门令,闸首门开到位后,再启动调整船厢水深。
3.2 减少闭锁停机发生的方法
3.2.1减少开船厢门过程受水位闭锁的影响
对于开船厢门闭锁停机,最初的方式是依据水位信息系统,船厢对接时计算船厢位置与水位差值,当水位变化较快时,操作员须不断观察并计算,增加了工作量,也不便于监护机构的运行状态,降低了工作效率。对此,通过优化上位机界面显示,新增船厢位置与水位差值的实时显示,提高预判能力。如果在未开启船厢门之前,操作员已经预判船厢水深会波动变幅大,须立刻停止对接;船厢位置与航道水位偏差允许范围内时,可以先开启船厢门,再开启卧倒门,减少因闭锁条件的影响造成的船厢门反复启停。
3.2.2降低对接锁定信号丢失故障
对接锁定信号丢失故障发生频率较高,而且该故障也增加了碍航的风险。为减少该故障的发生,应尽量减少船厢对接时间和船厢一直处于高水位(3.6 m以上)的情况。对此,通过优化上行船舶靠墩等待的进厢方式减少船厢对接时间。以往上行进厢船舶遇到会船时,会选择靠离下游闸首较远的南侧靠船墩进行等待,试通航运行中通过对船舶会船以及进厢方式的观察研究得知,离闸首门较近的北侧靠船墩及其水域可以进行会船,因此调整了船舶调度,允许上行进厢汇船的船舶靠下游北侧4#、5#、6#靠船墩,缩短了进厢时间,特别是吃水较深的大尺度船舶,缩短了近25 min。
3.2.3降低调整船厢水深中断故障
因为航道水位常态性的波动,同时因为船舶进出厢时对厢头水体的扰动,导致闸首门产生向上的小幅度漂移[4],使作为调整水深的闭锁条件的卧倒门开到位信号丢失,调整船厢水深被中断。因而尽量减少船厢与航道的对接时间,避免航道水位波动的影响。以上关于上行船舶靠墩等待的进厢方式的优化,同样适用于减少调整船厢水深流程中断的发生。
3.3 闭锁优化
3.3.1优化船舶进出厢变灯令
增加厢头和闸首的强制变灯令,当船舶进出厢、船厢水深不满足闭锁条件范围时,确认船厢水深满足船舶动态吃水需求[5],保证船舶进出厢行驶安全后,点击旁路“上下厢头(闸首)信号灯绿灯(变灯)”。增强对吃水较浅的船舶进出厢指挥的灵活性和动作的流畅性,缩短进出厢时间。同时,上位机界面增加水深数值的警示提示,当船厢水深不满足闭锁范围时,数值由黑变红,便于操作员及时发现和应对,提高操作效率。
3.3.2优化安全站水位判断方式
优化各机构因为安全站水位不满足的闭锁限制,仅仅在机构动作前作为判断条件,减少机构在运行时由于水位波动造成的停机,减轻设备结构冲击,降低停机故障率,提高设备的稳定性。
3.3.3优化闭锁条件报警显示
闭锁条件设在一定范围时,参数对象可能会出现在临界值范围波动的情况,机构可能因为条件的波动反复启停,这样会给各机构运行带来很大冲击,有损设备的使用寿命。目前,闭锁条件不满足时不能像故障报警一样弹出反馈界面,出现动作中断或机构反复启停不能及时察觉,影响运行效率。因此,建议设置闭锁故障反馈显示,当闭锁不满足时,提醒操作员,提高运行状态的可视化和操作的人性化。
3.4 结果分析
优化前后常见相同闭锁停机次数故障对比见表6。
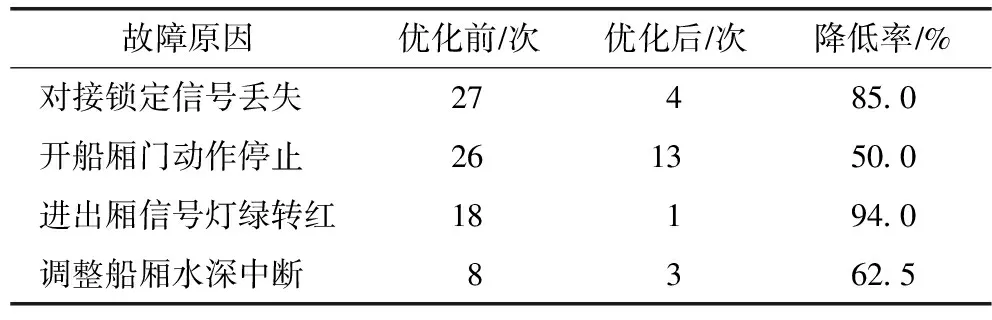
表6 优化前后常见相同闭锁停机次数故障对比
从表6可知,通过集控操作技巧、调度方式的改变以及停航改造期间的流程优化,对接锁定信号丢失、开船厢门动作停止、进出厢信号灯绿转红及调整船厢水深中断故障率均显著降低,提高了流程稳定性和通航效率。
4 结论
1)根据船厢水深、船舶吃水及航道水位状态的相对关系,同时优化集控界面的显示,给集控操作员提供直观的信息,便可按照当前状态选择直接开船厢门、先关门调水再开门或者重新对接,应对开船厢门停止的闭锁停机。
2)以工艺流程为中心,利用集控与检修模式的优势,采用2种模式相结合的方法,快速解除对接锁定信号丢失的闭锁停机故障。
3)优化上位机界面显示及调整上行船舶靠墩等待方式,缩短进厢时间和对接时间,改善水位变动对设备的影响,显著减少对接锁定信号丢失和调整水深中断的闭锁停机的发生几率。
4)优化开船厢门闭锁条件中水位判断方式后,显著减少了机构因闭锁条件影响反复启停的次数,减轻了对设备结构的冲击,有利于延长设备使用寿命。
猜你喜欢
河北水利(2022年10期)2022-12-29 11:48:12
海洋通报(2022年4期)2022-10-10 07:40:32
军事文摘(2022年13期)2022-08-27 01:26:36
现代仪器与医疗(2021年4期)2021-11-05 08:25:06
当代旅游(2019年3期)2019-09-19 13:05:05
自动化学报(2017年11期)2017-04-04 02:52:30
党员电教与远程教育(2016年3期)2016-03-19 16:46:56
汽车维护与修理(2016年3期)2016-02-28 13:17:07
浙江国土资源(2015年4期)2015-05-09 08:43:59
少先队活动(2014年6期)2015-03-18 11:19:18
