垃圾转运车机械臂上料机构设计难点分析
2020-02-26 02:06:52合加新能源汽车有限公司汽车技术中心
专用汽车 2020年1期
1. 合加新能源汽车有限公司汽车技术中心 谢 勇
2. 神龙汽车有限公司技术中心 王亚莲
通过对国内外垃圾成分以及收运模式的差异以及抱桶手爪设计分析,说明了垃圾转运车机械臂设计中的需要满足的条件和设计难点。分析出抱桶手爪设计时需在不破坏垃圾桶的条件下完成重载垃圾桶的上料工作是机械臂上料机构设计的关键点。
使用机械化作业的垃圾转运车对塑料垃圾桶中的生活垃圾进行转运已经成为国内生活垃圾转运主流模式。垃圾转运车需要一套上料机构将塑料垃圾桶中的垃圾倒入垃圾箱中。各种后装上料机构、侧装上料机构目前在国内已有广泛的运用,但这些机构都需要先将垃圾桶挂到机构上,导致环卫工人的劳动强度较大。机械臂上料机构在国外垃圾转运车中已有广泛的应用,其最大的特点就是无人化,大大减轻了环卫工人的劳动强度,大大降低了垃圾收运的成本,是未来垃圾收运的发展方向,但国内还没有成熟可靠的运用机械臂进行垃圾收集的模式出现,本文将对机械臂上料机构的设计难点进行分析,并提出满足国内塑料桶垃圾收集的机械臂设计性能要求。
国外垃圾转运车机械臂上料机构简介
国外机械臂种类很多,但是归结起来,机械臂上料都要完成展开、夹桶、提桶、翻桶4个动作。
1.Heil 公司
Heil公司的3种机械臂( PYTHON® 型、RAPID RAIL®型、MULTIPACK®型)均采用折叠式,抓取范围广,占用空间小,但运行控制困难,稳定性较差。

2.Bridgeprot 公司
Bridgeprot公司的3种机械臂(Ranger 型、Ranger+Drop+Frame 型号、Ranger+SA-2型)均采用直角坐标移动式,运行平稳可靠,控制简单,但抓取范围小,占用空间较大。
3.Faun 公司
Fa u n公司的三种机械臂(S i d e p r e s s C1100型、Sidepress FC1100型、Sidepress F3000型)中,SidepressC1100型和 Sidepress FC1100型采用折叠式,具有折叠式机械臂的优缺点,Sidepress F3000型采用直角坐标移动式,具有直角坐标机械臂的优缺点。
国内垃圾桶垃圾转运特点分析
虽然国外机械臂上料机构很多种,但并不适用于我国生活垃圾收运的现状。由于我国垃圾成分和收运模式的特点,导致机械臂上料机构的设计较国外更具难度。
1.国内外垃圾成分的差异
国外发达国家基本上已经实现垃圾分类收集,主要垃圾成分见表1[1]。

表 1 部分发达国家以及我国台湾省垃圾成分比较 单位:(%)
我国的垃圾分类目前还处于起步阶段,主要城市垃圾成分见表 2[1]。
从表1、2可以看出,国外城市生活垃圾以纸张等低密度的垃圾成分为主,而我国城市垃圾成分中以厨余垃圾等高密度垃圾为主。我国垃圾含水率很高,特别到了夏天,西瓜等水果进一步增加垃圾桶的质量。我国农村地区泥土、建筑垃圾等特别多,特别是北方地区,到了冬天,家家烧煤取暖,生活垃圾中混合了泥土、建筑垃圾、煤灰、雨雪等,如图1所示。
由于国内生活垃圾成分与国外生活垃圾成分的巨大差异,导致国内垃圾桶单桶垃圾的质量变化很大,240L的垃圾桶单桶质量可以达到 150~200kg,远超国外垃圾桶单桶垃圾质量。比较大的单桶质量,对机械臂负载能力提出更高的要求。

表 2 我国主要城市垃圾成分比较 单位:(%)
2.国内外垃圾收运模式的差异
国外生活垃圾基本上已实现分类收集,垃圾桶质量轻,含水率低。垃圾桶整齐地摆放在马路边上,这些条件都很有利于机械臂抓取垃圾桶。国外垃圾桶基本不会装满,机械臂上料时就算发生倾斜也不会出现垃圾洒落现象。
国内还没有实现生活垃圾分类,垃圾桶内垃圾成分复杂,含水率高,垃圾桶重。垃圾桶往往摆放在小区里面,小区里道路情况复杂,同时垃圾桶常常好几个堆放在一起,摆放无规律。生活垃圾收集时常常在夜间进行,如果收集农村生活垃圾,其路面条件可能更为复杂。国内垃圾桶常常装满了垃圾,甚至已经溢出垃圾桶(如图2所示)。机械臂上料的过程中如果不能保持垃圾桶垂直于地面,垃圾很容易洒落地面。国内生活垃圾收运条件的复杂性导致机械臂抓取垃圾桶的工况也更为复杂,且对机械臂的灵活性、运动过程的平稳性、负载能力等都提出了更高的要求。

图 1 中国北方冬季垃圾成分

图 2 生活小区堆放的垃圾桶
抱桶手爪机构设计难点分析
1.国外典型抱桶手爪结构
国外典型的抱桶手爪结构主要由抱桶油缸、传动齿轮、抱桶机械臂、抱桶带、抱桶带张紧装置等几大部分组成,如图3 所示。
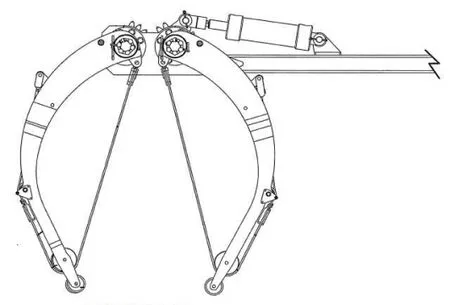
图 3 国外典型抱桶手爪结构
由于国内垃圾桶质量大,摆放不整齐,垃圾桶容易满溢、作业道路情况复杂等情况,国内机械臂上料机构需要具有更好的灵活性和负载能力。不过,真正导致国内机械臂上料机构不能像国外机械臂那样广泛使用的原因是国外的抱桶手爪基本无法满足国内垃圾桶实际收运情况。为了有效地完成垃圾桶上料工作,抱桶手爪必须能紧紧地抓住垃圾桶,但是国内垃圾桶由于结构尺寸、质量、材料、强度等因素,抱桶手爪很难有效抓住垃圾桶。国外塑料垃圾桶结构形式多样,如图 4 所示。

图 4 国外典型垃圾桶结构
从图4中可以看出A型垃圾桶为上宽下窄方形结构、B型垃圾桶为上下同宽的方形结构、C型垃圾桶为上下同宽前圆后方的结构,只有D型垃圾桶是专门用于机械手抱桶装置的塑料垃圾桶,该垃圾桶下半部是一个圆筒形的结构,非常有利于机械手抱桶,而且不管垃圾桶放正还是放歪了,机械臂都可以有效地抱起垃圾桶,同时垃圾桶的上半部形成一个方形的台阶,这样垃圾桶就算很重也不容易掉落。
我国建设部发布的CJ/T 280《塑料垃圾桶通用技术条件》对120L、240L塑料垃圾桶的结构、尺寸、壁厚要求、材料、机械性能等进行了规定。从该通用技术条件可以看出,我国规定的塑料垃圾桶主要是针对侧挂、后挂上料的方式设计制造的,塑料垃圾桶上有专门用于挂桶的吊挂尺寸说明,如图 5 所示。
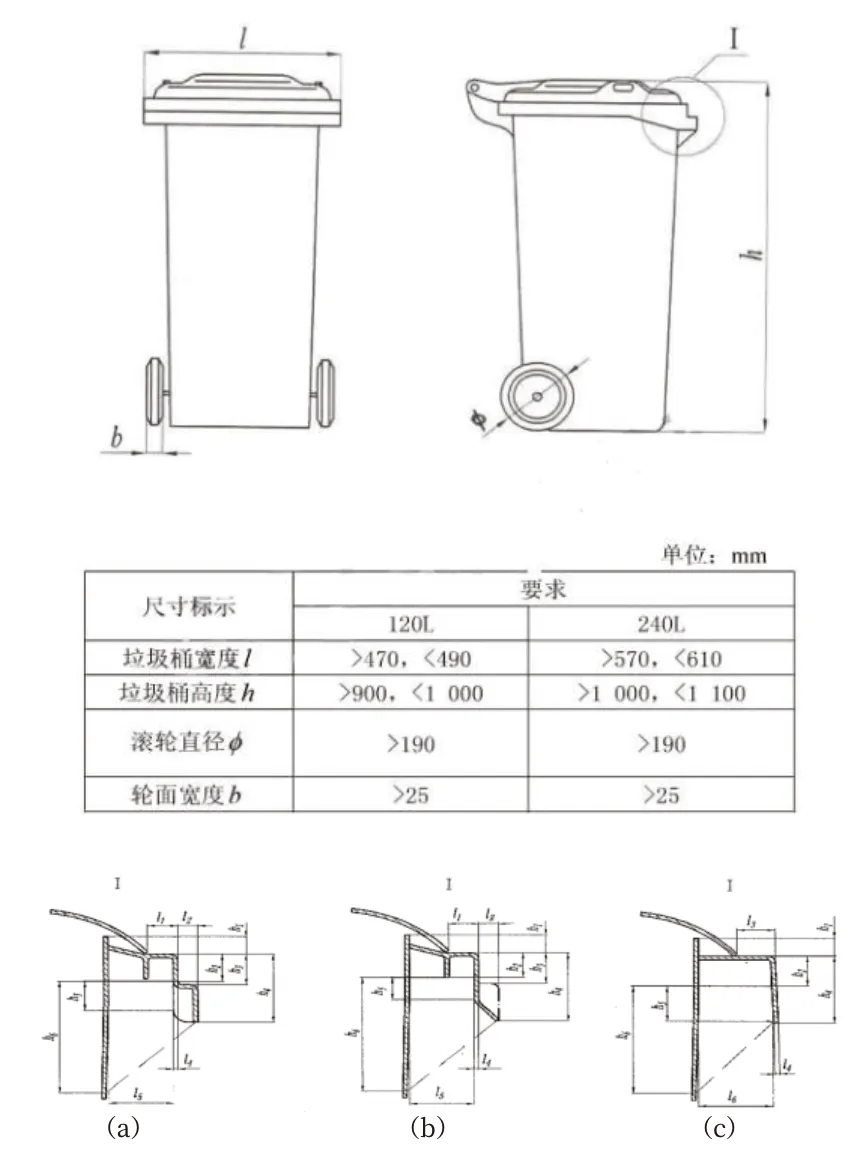
图 5 我国垃圾桶尺寸
我国的塑料垃圾桶为方形结构,如果垃圾桶放歪了,非常不利于手爪抱桶,垃圾桶桶身的材料采用高密度聚乙烯,而且为了使得垃圾桶更加美观,垃圾桶表面非常光滑,垃圾一旦重了,抱桶手爪抱桶时会出现打滑现象。
2. 垃圾桶受力变形分析
2.1 垃圾桶质量与材质分析
我国垃圾桶成分复杂,如果只装生活垃圾桶,240L垃圾桶的质量约为110kg。如果出现下雨等情况,240L垃圾桶的质量约为200kg。如果垃圾桶内装满了粉煤灰、泥土、建筑垃圾等情况,240L 垃圾桶的质量可以达到500kg。
我国垃圾桶使用的材料五花八门,有铁皮垃圾桶、玻璃钢垃圾桶、塑料垃圾桶等等。根据CJ/T 280《塑料垃圾桶通用技术条件》垃圾桶桶身与桶盖的材料应该采用高密度聚乙烯,桶壁和桶底的厚度不低于4mm。同时外观要求表面光滑平整,不允许有波纹、划痕、黑点、杂质、气泡、裂纹等。高密度聚乙烯机械性能差、透气差、易变形、易老化、易发脆、易应力开裂。
2.2 抱桶手爪抱桶状态
抱桶手爪抱桶状态图6所示。当抱桶手爪抱住垃圾桶时,抱桶带紧紧地包络住桶的两边,垃圾桶两边受力变形,在摩擦力的作用下,抱桶手爪提起垃圾桶向上运动。抱桶带夹紧力越大,摩擦力越大。根据摩擦力的计算公式:f =μN,得到N=f/μ。
垃圾桶身的材料采用高密度聚乙烯,同时外观要求表面光滑平整,垃圾桶身的摩擦系数为 0.12。抱起装满生活垃圾的垃圾桶需要的正压力约为8900N,抱起装满水的垃圾桶需要的正压力约为16300N,抱起装满了粉煤灰、泥土、建筑垃圾等物的垃圾桶需要的正压力至少需要 40800N。为了减少单位面积压强,尽量设计大面积的受力面积约为 0.3m2。
有限元分析参数设定如表3所示。

图 6 抱桶手爪抱桶状态图
2.3 分析结果
软件对垃圾桶所受压力和变形进行材料应力分析得到结果如图7~9所示。抱起装满生活垃圾的垃圾桶需要的正压力约为8900N时,垃圾桶受到的最大正压力为25MPa,垃圾桶最大变形量为71mm。抱起装满水的垃圾桶需要的正压力约为1 6 3 0 0 N时,圾桶受到的最大正压力为44MPa,垃圾桶最大变形量为90mm;抱起装满了粉煤灰、泥土、建筑垃圾等物的垃圾桶需要的正压力至少需要40800N时,垃圾桶受到的最大正压力为6 2 M P a,垃圾桶最大变形量为 126mm。

表 3 有限元分析参数表

图7 装满生活垃圾垃圾桶夹紧时变形量
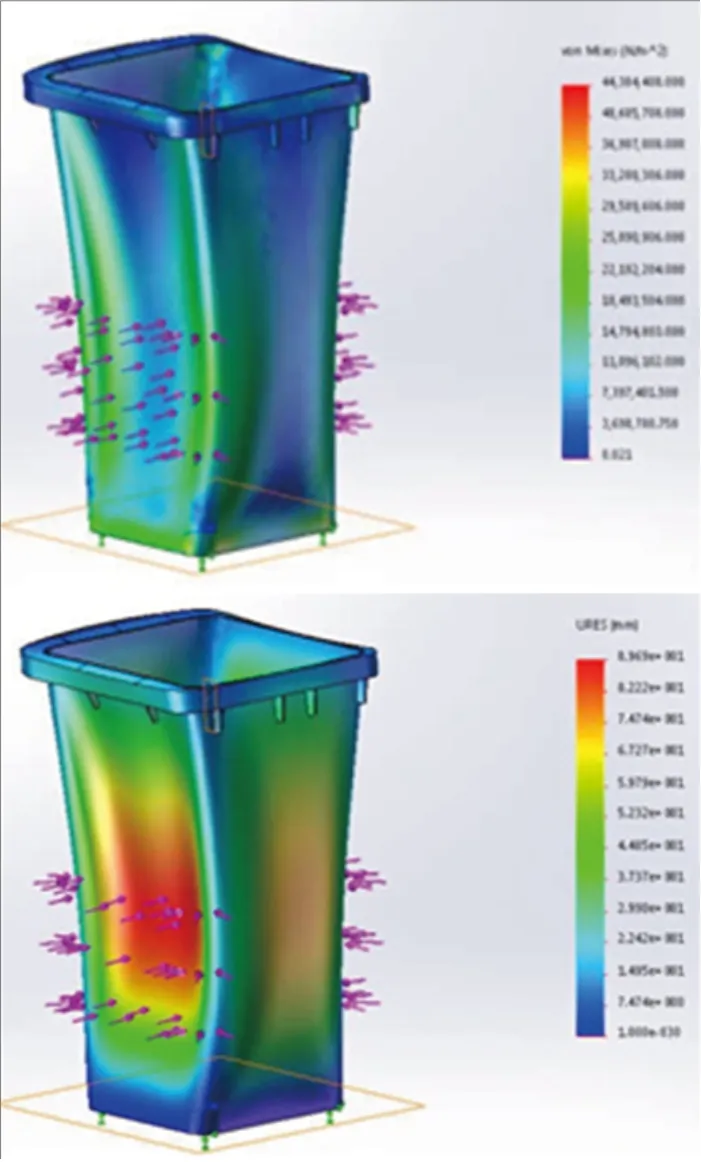
图8 装满水垃圾桶夹紧时变形量图

图 9 装满泥土垃圾桶夹紧时变形量
从受力分析结果可以看出,垃圾桶在机械抱爪夹紧的情况下,并不是均匀受力,垃圾桶的四边因为强度高,变形量小,故也是应力集中处。参考高密度聚乙烯抗压强度约为22.5MPa,同时结合高密度聚乙烯易变形、易老化、易发脆、易应力开裂的特点,可以很容易地得出结论:在我国垃圾桶质量以及垃圾桶现有结构不变的条件下,使用机械手爪反复抓取垃圾桶,很容易造成垃圾桶受损。因此设计出在不破坏垃圾桶的前提下完成重载垃圾桶的上料工作将是机械臂上料机构设计的关键点与难点。
结语
本文通过对国内外垃圾成分以及收运模式的差异以及抱桶手爪设计分析,说明了垃圾转运车机械臂设计中需要满足的条件和设计难点。首先机械臂要具有足够的自由度和灵活性,这样才能在垃圾桶摆放不正或摆放位置偏远的条件下仍可以抓住垃圾桶;其次机械运动过程在一定速度条件下必须保证平稳性,这样才能在保持高效装载的条件下垃圾不洒落地面;然后机械臂上料机构负载能力要强,这样才能适应垃圾成分复杂,垃圾桶偏重的情况;最后总结出,抱桶手爪设计时需保证不破坏垃圾桶的条件下完成重载垃圾桶的上料工作是机械臂上料机构设计的关键点。
猜你喜欢
交通运输系统工程与信息(2023年6期)2023-12-28 02:54:20
中国资源综合利用(2022年6期)2022-07-04 07:59:26
橡塑技术与装备(2021年24期)2021-12-30 07:07:16
今日农业(2021年13期)2021-11-26 11:50:54
环境卫生工程(2021年5期)2021-11-20 05:45:26
橡塑技术与装备(2021年12期)2021-06-24 09:30:34
橡塑技术与装备(2021年1期)2021-01-05 04:00:56
河北省科学院学报(2020年4期)2020-03-19 02:02:38
电子制作(2018年24期)2019-01-03 02:30:30
荣誉杂志(2017年7期)2017-08-23 08:05:59