
全自动餐具分类回收一体机的设计*
2020-02-25 05:00曹建猛王占瑞颜廷宇石姚林
机电工程技术 2020年1期
曹建猛,刘 敬,王占瑞,颜廷宇,石姚林
(滨州学院机电工程学院,山东滨州 256600)
0 引言
在学生餐厅、职工餐厅等公共饮食场所就餐人数较多,饭后会留下大量的餐具等待分类回收[1-2]。目前餐厅多采用人工分离回收餐具,这种分类方式速度慢、效率低且工作量大,而且随着社会劳动力的短缺,人工成本也逐渐升高[3-4]。目前,市场上的餐具回收装置以传送、清洗功能为主,所附加的餐具分类功能不完善,不能将勺子、筷子、碗与餐盘进行有效分类收集,且食物残渣得不到及时的回收[5-8]。餐具的分离需要完成勺子、筷子、碗与餐盘的分离,并将分离出的残渣收集,若将这些工序由一台机器连续完成,则能够节约大量劳动力,并大大提高工作效率。为了克服现有技术的不足,本文设计了一款全自动餐具分类回收一体机,能够代替人工实现餐具的分类回收,提高工作效率的同时改善就餐环境。
1 整体结构及设计理念
机器的整体尺寸根据实际需要设计,在充分考虑勺子、筷子、碗与餐盘的分离以及残渣分离收集的功能需求下,构思并设计全自动餐具分类回收一体机的整体结构,以确保不同工序由1台机器连续完成。
图1所示为全自动餐具分类回收一体机的整体结构示意图,主要由机架、勺子分离机构、传送机构、饭筷筛选机构、饭筷分离机构和碗盘分离机构组成。将餐具放置于传输机构,当餐具经过勺子分离机构时,磁性转盘将勺子吸起,挡勺板将勺子挡落在勺子滑轨,最终勺子落入勺子收集箱。餐具随传送机构向机器后方继续传输,经过饭筷筛选机构时,在3根错落布置的刷轴作用下,将食物残渣和筷子扫落至饭筷分离机构。
清除残渣后的碗和餐盘随传送带运至后方的碗盘分离机构。筷子和食物残渣落至饭筷分离机构后,随推板在漏饭栅板上往复推移,残渣从漏饭孔落入下方的残渣收集箱,筷子则从栅板两端落入筷子收集箱。
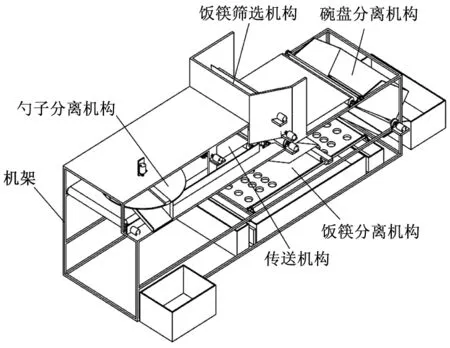
图1 全自动餐具分类回收一体机结构示意图
当碗和餐盘运至碗盘分离机构,落入该机构的筛选斗,筛选斗能够上下往复振动,促使盘子从餐盘出口落入下方的餐盘收集箱,碗从出碗口落入下方的碗收集箱。
2 机械结构设计
2.1 勺子分离机构
该机构包括吸勺机构、勺子滑道和挡勺板,如图2所示。吸勺机构由磁性转盘、转轴和转盘电机构成,磁性转盘上表面分布有强力磁铁,磁性转盘上表面与转轴固接,转轴通过联轴器与转盘电机相连。当餐盘上的勺子经过吸勺机构时,磁性转盘将勺子吸附于下表面。挡勺板竖向设置,挡勺板上端与磁性转盘下表面相切,下端固定在机架上,所述勺子滑道固定在挡勺板侧面。当勺子随磁性转盘转动至挡勺板处,勺子与吸勺机构分离,并沿固定于挡勺板侧面的勺子滑道滑落于勺子收集箱中。
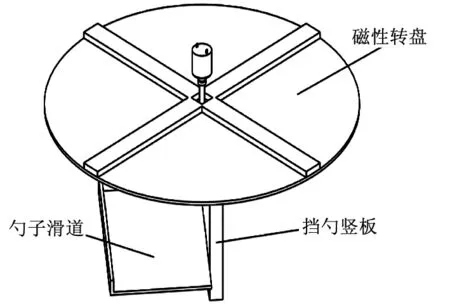
图2 勺子分离机构示意图
2.2 传送机构
传送机构由传送带、带轴、滚轴和传动电机构成,其中,传送带有2个,处于同一水平面并且沿传送方向前后对称设置。第1传送带位于机器前端,绕第1带轴和第2带轴转动,第1带轴通过联轴器与第1传送电机相连,第2传送带绕第3带轴和第4带轴转动,第3带轴通过联轴器与第2传送电机相连,第1传送带和第2传送带之间有一定距离(120~140 mm),2个传送带之间设置有与带轴平行的滚轴,滚轴与2个传送带间距相等,且处于同一水平面;带轴和滚轴两端均通过轴承座固定在机架上;第3带轴和滚轴的同一侧均安装有链轮,2个链轮通过传动链条连接,传动链条在竖直平面内转动,如图3所示。
2.3 饭筷筛选机构
饭筷筛选机构主要包括第1刷轴、推碗轴、第2刷轴,其中推碗轴上等间隔固定4个推碗板,如图3所示。第1刷轴位于第1传送带的中部上方,与第1传送带间的竖直距离为80~100 mm,当第1刷轴转动时,刷毛可以深入碗内将残渣扫出。推碗轴和滚轴在同一竖直平面且与滚轴间的竖直距离为100~120 mm,当推碗轴在电机带动下转动时,推碗板随之旋转,推动碗越过第2刷轴至第2传送带上,碗继续向机器后方传送;所述第2刷轴将筷子及残渣与餐盘分离,第2刷轴位于第2传送带起始端,与第3带轴位于同一竖直平面内,第二刷轴与第2传送带间的竖直距离为20~30 mm,此竖直距离只有餐盘可以通过;饭筷筛选机构的工作过程为,当餐具经过饭筷筛选机构时,第1刷轴将碗中残渣扫出,推碗轴带动推碗板将碗推至第2传送带,餐盘从第2刷轴下方经过,第2刷轴将餐盘中的食物扫落在下方的饭筷分离机构。
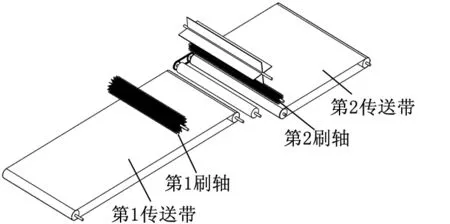
图3 饭筷筛选和传送机构的位置关系示意图
2.4 饭筷分离机构
饭筷分离机构主要包括漏饭栅板和饭筷推板,如图4所示。其中,漏饭栅板上开有漏饭孔,漏饭孔交错分布且直径小于筷子长度的1/2,饭筷推板与漏饭栅板相切。饭筷分离机构的工作过程为,当饭筷落在漏饭栅板上时,往复运动的饭筷推板将饭筷来回推动,在推动过程中筷子随饭筷推板平行前进,食物残渣从漏饭孔落入下方的残渣收集箱,筷子则从漏饭栅板两端落入下方的筷子收集箱。

图4 饭筷分离机构
2.5 碗盘分离机构
碗盘分离机构主要包括筛选斗、上下往复振动机构,如图5所示。筛选斗设置在机器后端,并与第2传送带末端承接,筛选斗的底板倾斜设置,底板末端开有宽为100~120 mm的出碗口,筛选斗底板下端开有宽10~15 mm的餐盘出口,所述上下往复振动机构包括第2光轴、偏心振动轮、第3光轴、振动电机组成,振动电机固定在机架上,振动电机工作时带动偏心振动轮转动,进而实现筛选斗的上下振动。碗盘分离机构的工作过程为,当碗和餐盘落入筛选斗,沿筛选斗底板下滑,最终碗从出碗口落入下方的碗收集箱,餐盘从餐盘出口滑出,落在下方的餐盘收集箱,整个过程振动机构不停振动筛选斗,使分离更加顺畅。
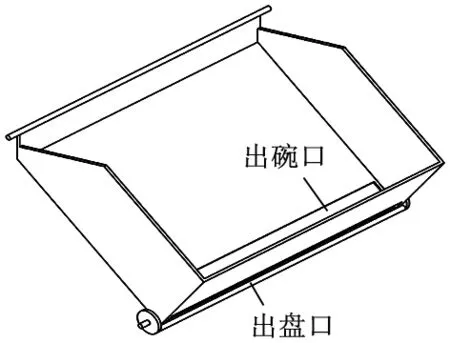
图5 碗盘分离机构
3 控制系统
为使机器各机构能够合理顺畅的工作,该机器以机电一体化为基础,通过控制系统对全自动餐具分类回收一体机进行集成控制,实现勺子分离、饭筷筛选、饭筷分离、碗盘分离等一系列处理工艺的自动化。
本研究所设计的控制系统以STM89C51单片机为控制核心,同时采用L298N电机驱动器、光电传感器和降压模块等电器元件进行辅助,实现餐具的自动分类回收功能。在模块电源方面设计了过流和过压保护,进一步增加控制系统抵抗电压和电流的冲击能力。
4 样机制作与试验
依据如上设计对样机进行试制并试验餐具分类回收效果。结果表明:该机器能够顺利实现餐具分类回收的自动化,每分钟可分类6~10套餐具;食物残渣去除率达78%~85%,未去除的食物残渣主要集中在餐盘底部,对餐具表面的破坏程度小;传输机构可流畅连续地进行传送;经试验,设定磁性转盘的旋转速度为30~50 r/min,振动盒的振动频率为20~40次/min,饭筷推板运动速度为5~10 cm/s。后期改进可考虑在碗盘分离机构上附加水管,以便及时冲洗碗盘。

图6 全自动餐具分类回收一体机样机
5 结束语
本文设计了一款新型全自动餐具分类回收机,各机构在控制系统的配合下能够自动实现勺子、筷子、碗盘及残渣的分类回收,不仅能够大大提高工作效率,还能节约大量劳动力,该机器可用于就餐人口密集的学生食堂、员工餐厅,具有广阔的应用前景。
猜你喜欢
中学生数理化·高一版(2021年1期)2021-03-19
——“模型类”相关试题选登
教学考试(高考物理)(2020年4期)2020-11-16
小读者·爱读写(2020年1期)2020-02-25
家居廊(2019年1期)2019-09-10
故事作文·高年级(2019年4期)2019-04-17
中学教学参考·理科版(2016年11期)2017-06-08
美食(2017年4期)2017-05-04
创新作文·初中版(2015年9期)2015-10-22
职工法律天地·上半月(2014年8期)2015-01-20
领导文萃(2014年9期)2014-05-26
