
基于ABB机器人的I/O模块与信号配置*
2020-02-25 05:00张宁菊俞张勇
机电工程技术 2020年1期
张宁菊,俞张勇
(无锡职业技术学院,江苏无锡 214121)
0 引言
《中国制造2025》(国发〔2015〕28号)提出工业机器人是我国十个重点发展领域之一,是典型的智能装备,是智能制造的关键切入点[1-2]。目前使用工业机器人的品牌众多,就其所在的行业内部而言,主要有国际知名的4大家族:KUKA、ABB、FANUC、安川,国内则有以新松为代表的国产机器人的“四小家族”。就长三角地区来讲,ABB机器人以其重复定位精度高、手臂刚性好、便于系统二次开发等优点,在自动化领域中应用较为广泛。
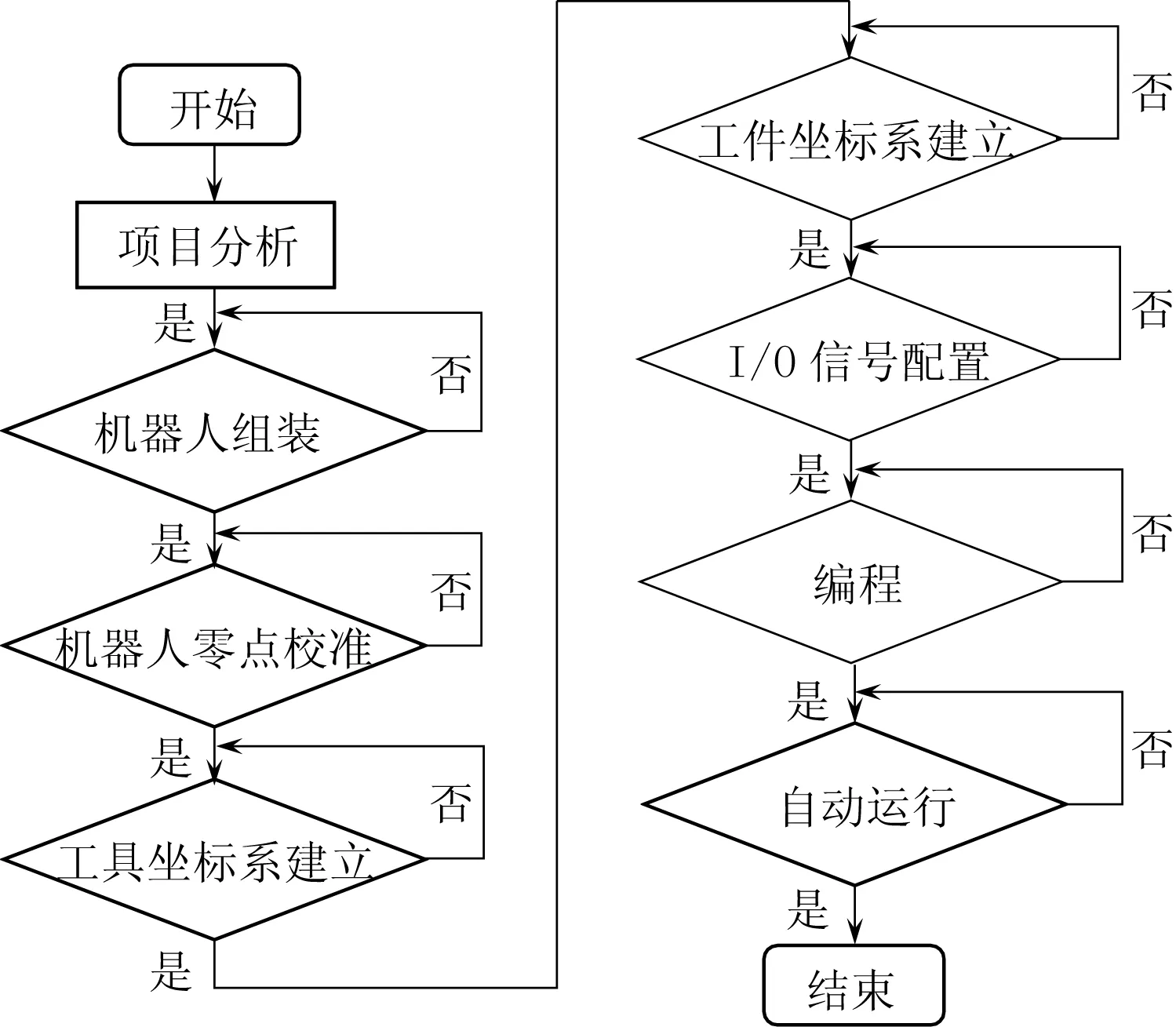
图1 机器人项目实施流程
ABB机器人从结构来讲是由机械部分、控制部分、传感部分有机组成,其常规型号包括IRB120、IRB1410、IRB1600、IRB2400等。对于工业自动化生产线来讲,机器人的项目实施流程一般有8个环节[3],如图1所示,8个环节中I/O信号配置在工业现场尤为重要,本研究重点结合ABB的IRB120工业机器人的搬运系统,研究I/O模块与信号配置。
1 I/O模块
ABB工业机器人有丰富的I/O通讯接口,其通讯种类如表1所示,它可以方便地与其他设备相连。ABB可以选配标准的PLC,可以省去与外部PLC进行通讯设置的麻烦,并且在机器人示教器上就能实现与PLC相关的操作。ABB标准的I/O板(表2)提供的常用信号处理有:数字输入、数字输出、模拟输入、模拟输出等。本设计以常用的ABB标准I/O板DSQC652和Profibus-DP为例进行研究。
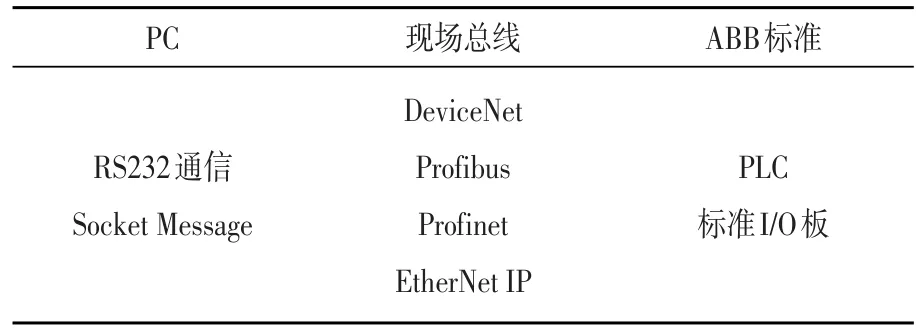
表1 常用ABB工业机器人I/O通讯种类
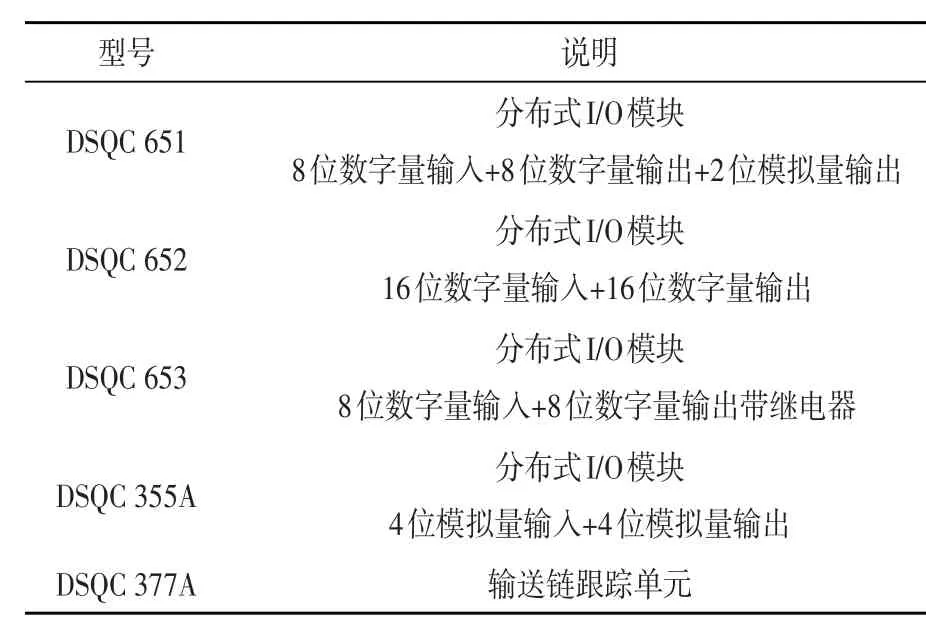
表2 常用ABB工业机器人标准I/O板
DSQC652型为分布式I/O模块,如图2所示,X1/X2为机器人数字输出端口,X3/X4为机器人数字输入端口,ABB标准I/O板是挂在DeviceNet网络上的,通过总线接口X5与DeviceNet总线进行通讯,X5上6~12的跳线用于决定模块的地址,地址可用范围为10~63。
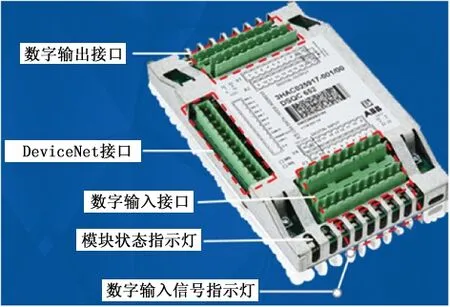
图2 I/O模块

图3 获得模块地址10
IRB 120默认标配为DSQC 652,它的地址为10,可将第8脚和第10脚的跳线剪去,2+8=10,就可获得10的地址,如图3所示。
2 输入及输出信号的配置
搬运机器人一般用于上下料,负荷较大,运动速度快,搬运工件的方式主要采用抓取和吸取2种方式,一般吸取操作流程如图4所示。首先选择真空吸盘安装到机器人法兰盘的末端,连接气动电气系统,并将信号线连接到输出端口X2上。
ABB标准I/O板安装后,需要对各信号进行一系列配置后才能在软件中使用。IRB 120默认标配为DSQC 652板,配有16位数字量输入16位数字量输出(表2),设置步骤有2步。

图4 机器人搬运的操作流程
2.1 定义DSQC652板的总线连接
定义DSQC652总线连接的相关参数说明如表3所示。操作步骤如下所示。
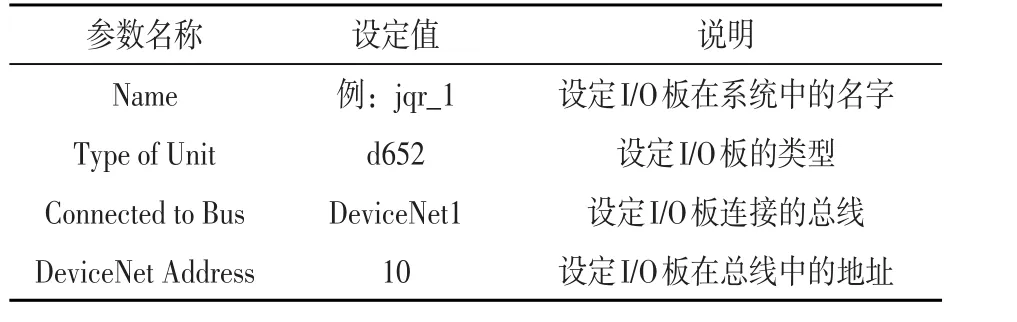
表3 相关参数说明
(1)点击[主菜单]下[控制面板],进入控制面板界面,如图5所示;点击[配置],进入配置界面,如图6所示。
(2)点击[DeviceNet Device],进入配置界面,如图7所示;点击添加,选择默认中DSQC652模板,如图8所示。
(3)更改Name参数名称,如图9所示;箭头向下移动到Address,双击输入“10”,点击“确定”,如图10。
此时系统提醒,重新启动控制器,参数配置在控制器重新启动后才能生效。
2.2 I/O信号配置
搬运机器人一般用于上下料,现需配置di-jg(用于工作原点检测)和do-xp(用于吸盘搬运工件)。
(1)点击[主菜单]下[控制面板],进入控制面板界面;点击[配置],进入配置界面;点击[Signal],进入信号界面,如图11所示;点击“添加”,如图12所示。
(2)对Name、Type of Signal、Assigned to Device、Device Mapping进行配置,设置后的di-jg如图13所示;再次点击“添加”,对Name等4个参数进行配置,设置后的do-xp,如图14所示。全部设置完成后,务必重新启动控制器,参数配置才能生效。此时如前面配置有错误,会提示错误。

图5 “控制面板”界面

图6 配置界面
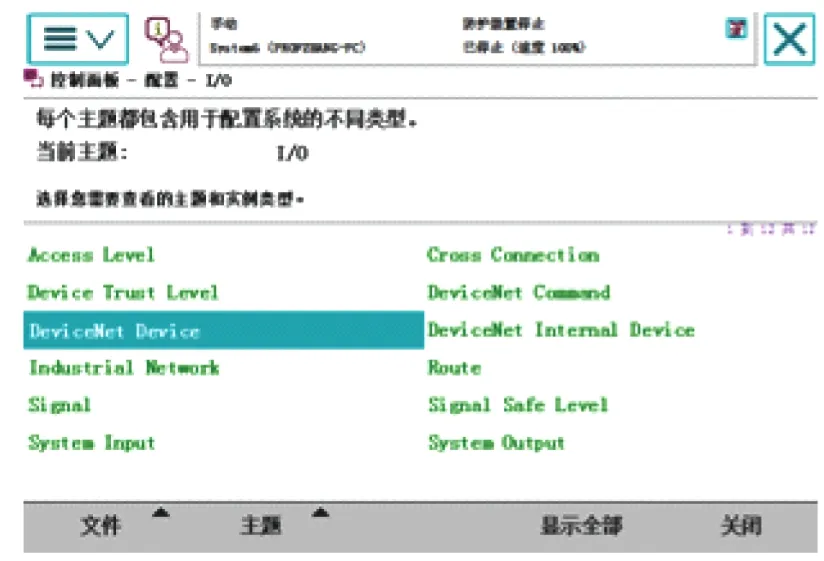
图7 DeviceNet Device界面
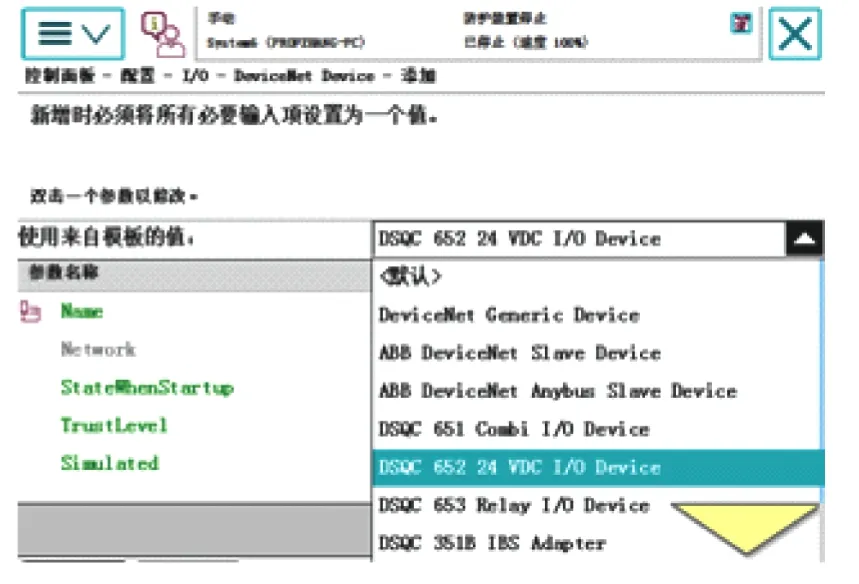
图8 DSQC652模板
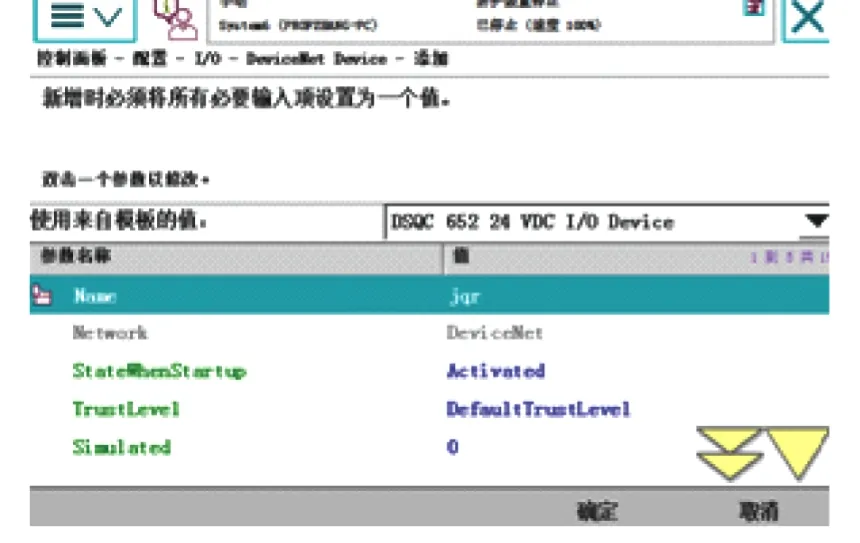
图9 更改Name参数名称

图10 Address设置
(3)信号查看
点击主菜单,进入“输入输出”界面,点击“视图”,点击“数字输入”,选择刚才配置的di-jg,设置为“1”,如图15所示,查看机器实际的激光是否亮,如亮则信号配备正确。
实际使用时,可以将常用信号添加到常用列表中。点击主菜单,进入“I/O”界面,勾中di-jg和do-xp等信号,点击“关闭”,点击“是”,这样便于后面的操作。

图11 Signal界面
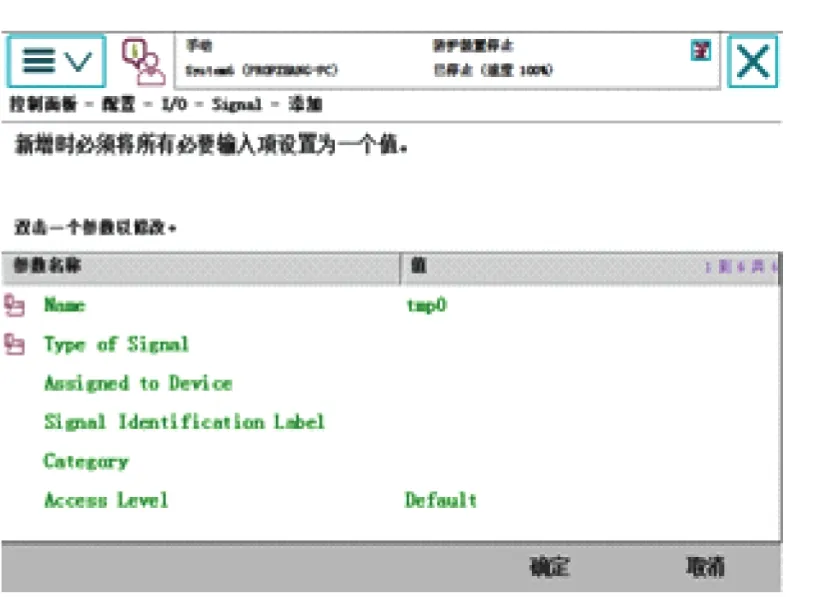
图12 4个参数

图13 di-jg设置
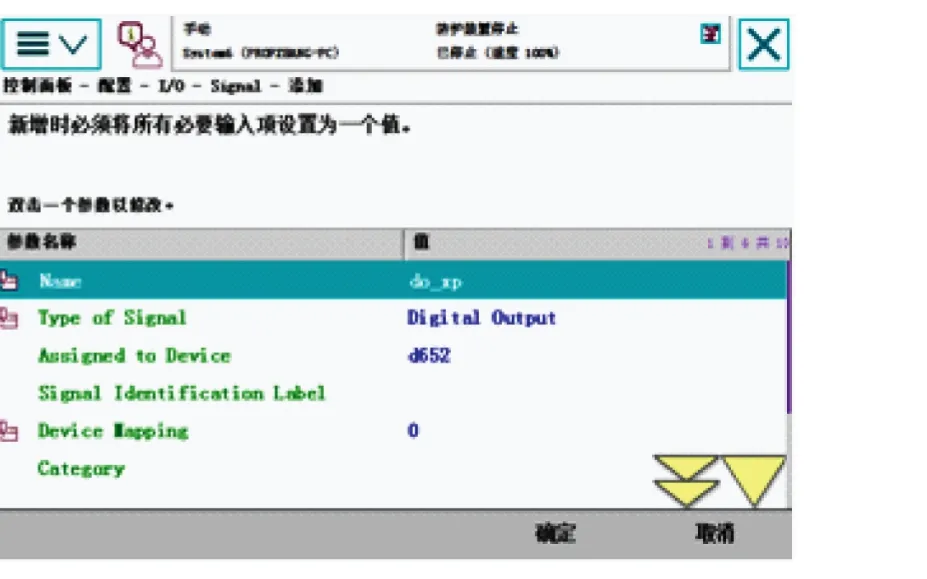
图14 do-xp设置

图15 信号查看
通过以上步骤,完成了对ABB机器人的输入、输出信号配置,配置后的机器人可直接用于自动化生产实践中。
3 结束语
目前工业机器人领域的研究范围比较宽,但对于如何基于某种机器人,进行I/O模块与信号配置的阐述较少[5-6]。智能制造时代的到来,在自动化生产线中用工业机器人进行集成时,对于I/O模块及输入、输出信号配置尤为重要,本研究对于其他品牌机器人的使用也一定有借鉴意义。
猜你喜欢
少先队活动(2021年4期)2021-07-23
水上消防(2020年5期)2020-12-14
当代陕西(2020年13期)2020-08-24
上海建材(2020年12期)2020-04-13
电脑爱好者(2018年18期)2018-11-05
制造技术与机床(2017年5期)2018-01-19
电脑爱好者(2017年9期)2017-06-01
中国材料进展(2016年10期)2016-12-26
中国医学装备(2016年6期)2016-12-01
汽车维修技师(2016年5期)2016-11-16
