
基于红外传感器的旋转式无人机保护装置
2020-02-22 08:05徐泽霖郑祥明杨彬淇杨超
科技创新导报 2020年27期
徐泽霖 郑祥明 杨彬淇 杨超

摘 要:旋翼安全是无人机飞行的关键问题,为防止旋翼桨叶伤人,本项目提出一种创新型的无人机旋翼保护装置。该装置采用了旋转式保护框结构,配合红外光学传感器实时地对周围环境进行侦测并在接触到危险时发出信号,通过单片机即时地做出保护反应。实验表明,装置能够全方位、全覆盖、即时地对旋翼进行防护,并且起到十分显著的保护效果且同时对无人机气动性能影响较小。该无人机旋翼保护装置同时还有结构和原理较为简单、成本及重量较低等优点,为无人机旋翼保护的方案设计提供一定的指导依据。
关键词:旋翼 无人机 保护 转子 红外传感器
中图分类号:TM75 文献标识码:A 文章编号:1674-098X(2020)09(c)-0086-06
Abstract: Rotor safety is one of the key problems to drones. Our project proposes an innovative drones rotor protection device in order to prevent the rotor blade cuts. The device uses a frame structure working with IR optical sensor to constantly detect surrounding environment, and then sends a signal to trigger a single-chip microcomputer to make protective response immediately when contacts with danger. Experiments show that the device can protect the rotor in an all-round, full-coverage and real-time manner, and it has a very significant protection effect and has little influence on the aerodynamic performance of drone. At the same time, the rotor protection device has the advantages of simple structure and principle, low cost and weight, which provides some guidance for the design of rotor protection scheme.
Key Words: Rotor; Drone; Protection; Spinning; IR sensor
无人机飞行过程中,旋翼安全问题不可忽视。近年来,无人机用途越来越普及,而无人机的用户比例中有相当一部分为兒童和青少年,他们对于使用无人机的潜在威胁缺乏应有的认知水平;不仅如此,越来越多的人在人群较为密集的地方使用无人机或者在低空近距离的范围内放飞无人机。显而易见,如今无人机旋翼对人们造成伤害的可能性正在逐步上升,且不容轻视。
无人机的旋翼桨叶的旋转速度可超过1000r/min,如果人不小心伸出的手指接触到高速旋转中的旋翼,很容易严重割伤手指;此外由新闻报道可知,高速旋转的无人机旋翼还可能造成割伤手臂、身体甚至一度发生过旋翼割伤造成永久性失明的恶性事件。
因此,为了预防和规避操作人员在使用无人机过程中可能遇到的危险,在不过多牺牲无人机本身的气动性能前提下,设计并推广一种新型的旋翼保护装置来保证无人机飞行安全就格外重要。
1 研究背景
目前,无人机旋翼保护装置设计方面主要分为两方面:其一是直接在旋翼周围加装固定式的保护罩,其二是在无人机中加装感应装置,在无人机旋翼或机体将碰撞障碍物时自动避让,如图1。
第一种保护方案属于被动防护型,即采用屏障置于旋翼与外部物体之间,防止可能的接触。现有的绝大多数旋翼保护装置都采用了这种传统的固定式保护罩,其虽然结构与材料都足够坚固,防护性能较为可靠。但是其往往占用体积较大、重量较大且制作材料成本较高。为了保证无人机的气动性能,这种保护罩必须留有足够的间隙,这也使得这类刚性固定结构保护装置无法做到完整的覆盖的保护。现有的无人机保护架、保护圈、保护罩、保护笼等等或多或少地都存在以上的问题。
第二种保护方案属于主动保护型,这种类型的保护装置往往采用敏锐的传感元件配合保护机制勘测周围环境中可能的威胁并做出避障动作。一些产品采用了超声波测距仪、红外激光传感器等。这种保护方案则需要高效的反应速度和感应效率来支撑,对设计的技术以及感应装置精准程度要求较高,需要花费大量的设计与仪器购买成本。同时精密的传感器重量不容忽视,其勘测范围也很难做到全方位的覆盖。
我们认为一个保护装置要起到良好的保护效果必须关注并兼顾以下几点:
(1)重量较低、体积占用较少且对气动性能的影响较小。
(2)保护范围尽可能地大,最好能全覆盖整个旋翼。
(3)保护性能要足够好,能明显降低危险性。
(4)成本能够在保证以上效果的情况下尽可能低廉。
(5)结构较为简单,尽量少地对无人机飞动系统做修改。
2 结构设计
我们的项目旨在兼顾两个旋翼保护设计方面的优点,提出一种能够极小程度影响旋翼气动性能并能进行全面且有效保护的旋翼保护装置,用以提升旋翼无人机的飞行安全性能并且同时尽量保持较高的气动性能。
2.1 转子结构
首先我们设计了一个比旋翼叶片稍大,能够完整包裹旋翼两侧的外框,称其为转子,作为整个旋翼保护装置的感应装置。转子通过物理结构连接在马达上转轴上,其能通过摩擦力随着旋翼叶片一起旋转。我们通过改变转子与马达连接部分的材料与调整转子与马达转轴间的压力,从而能够控制转子与马达间的摩擦系数,调整两者间摩擦力的大小。实验用的旋翼转速为1400r/min,我们制作出的转子应用在转轴上时实际转速为200r/min,约为旋翼转速的1/7。
转子可以以一个较低的速度绕马达转轴旋转,因其速度较慢且材料相比于旋翼叶片弹性更大且硬度较小,所以当其于人手或人体其他部分接触时,不会对人造成伤害。
同时其保持一定速度,包裹住旋翼旋转,全方位地覆盖无人机旋翼,能够保证人体在接触到旋翼叶片前,先接触到作为感应装置和缓冲装置的转子。
2.2 感应信号系统
接着我们设计了感应信号系统。感应信号系统用于判断转子是否接触到人体或者环境是否有危险,用以提供制动信号给制动系统。
我们设计了一个六叶底盘,其加装在转子结构底部,随着转子一起旋转。我们在六叶底盘侧面安装了一个红外传感器,如图2。六叶底盘的每一个叶片都具有光学反射的特性,当转子与六叶底盘一同旋转,六个叶片通过红外传感器传感部分的频率能够被测出,从而我们可以得出转子的转速。只需判断该转速是否发生骤减或者降为0即可判断转子是否接触到障碍物。
安装并测量六叶底盘转速的好处一是避免直接测量转子,可以方便安装使用传感器测量;二是六叶底盘叶片通过传感器感应部分的频率是转子的3倍,判断其频率变化的反应速度也相应地是原来的3倍,使得刹车装置的启动变得更加快速;三是可以仅在六叶底盘处使用光学反射性更好的材料,节约成本且感应准确率更高。
而红外传感器导出的信号我们后面可以通过单片机来处理,进而决定是否发送刹车信号给制动系统。
2.3 制动系统(刹车系统)
制动系统即能使得旋翼叶片快速失去转动动能的结构,防止旋翼桨叶进一步割伤人体。
我们选择采用电调制动的方法,因为使用电调制动不需要额外安装零件,且制动效果极快。
制动系统的刹车信号由单片机根据红外传感器给出的频率信号来决定是否发出。
旋翼在正常运行的时候,根据实验数据,由传感器测出的转子的频率和旋翼的转速之间的关系如表1所示。
由此可知,旋翼在正常运行的时候,转子的转速会稳定在一个范围内,单片机就是监测这个转子的频率,如果它稳定在这个范围内,则旋翼正常运转,如果转子遇到障碍物,转子的转速会骤减为0(或者远小于稳定频率),则单片机会发出一个刹车信号给电调,进而实现刹车功能。
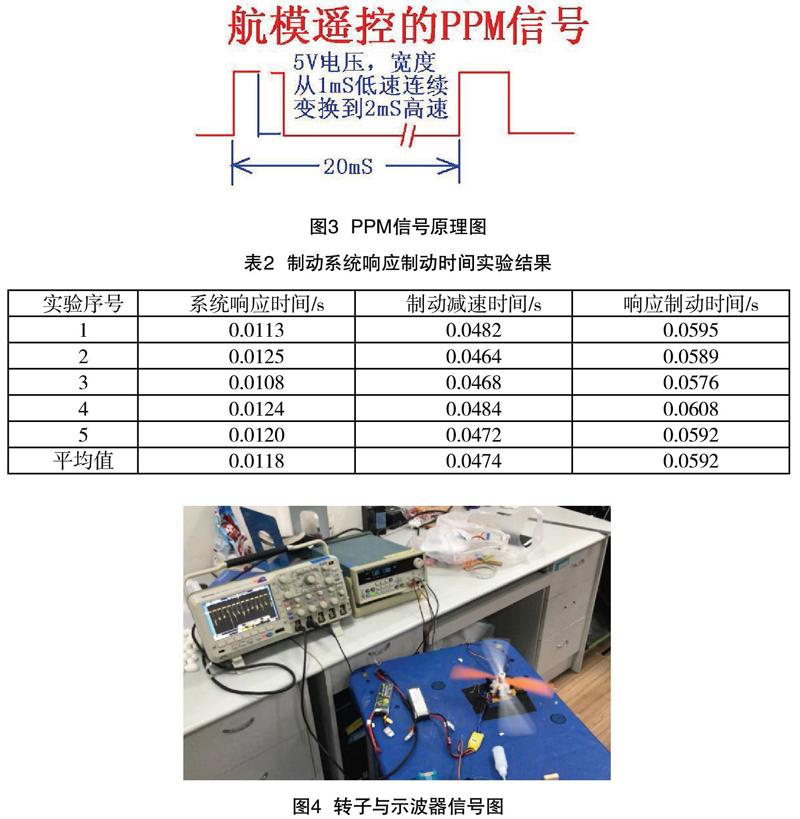
具体实现根据无刷电动机的控制原理可知,遥控器给电调各种速度变化信号,电调将其转变为方波信号,如图3所示。
该信号的周期是20ms,方波宽度为1ms到2ms连续变化,方波宽度越宽,旋翼转速越快,其中1ms代表速度为0,即为刹车信号,因此单片机输出的刹车信号就是输出这个宽度为1ms的方波信号,結果如表2。
一旦电调接收到刹车信号就会通过短路无刷直流电机的输入部分来使得电机旋转产生的电流反向,如图4从而使得电机转子也反向旋转,进而达到快速制动的效果。
3 装置应用优势及创新点
(1)全方位旋转式、全覆盖无死角、即时地对旋翼进行防护。
旋翼从任何方向接触到都是危险的,不仅仅是从上方。无人机飞行固有的三维特性意味着接触危险可能来自于任何方向,因此系统应该提供全方位的保护,而不是仅防护边缘,或者上下方。
我们设计了一个比旋翼叶片稍大,能够包围两边的外框作为保护装置,同时也可以作为感知外部物体接触的感应装置,称其为转子。转子通过物理结构连接在马达上转轴上,其能通过摩擦力随着旋翼叶片一起旋转,其转速远小于旋翼转速。
传统的固定式保护架,其具有大量空隙能够让人的手指或者树枝等物体插入并接触转子,无法做到全方位、全覆盖的防护;感应式规避的保护措施又无法做到应对突如其来的接触,无法完成即时的防护。
而我们设计的转子保护结构,其中低速旋转的特性,使得其能够即时地、全方位、全覆盖地感应并保护外界物体。在物体接触到转子时,先给了旋翼保护系统缓冲的时间,进而对旋翼进行刹车,使物体不与高速转动的旋翼相接触。
(2)重量相较于一般的传统旋翼保护装置较轻
我们的保护装置主要重量来自与转子结构,转子体积很小,且对于材料强度要求较低,我们最终选取树脂作为转子材料,因此其重量极轻,仅为20.00g,远低于传统的固定式保护装置。
(3)气动性能影响较小。
对比于传统的固定式旋翼保护装置,我们的转子结构所占空间极少,且其截面积很小,其旋转时几乎不阻碍旋翼的气流。转子对于空气动力影响要远远小于无人机保持架或者旋翼吊杆本身的空气动力影响。
(4)保护更为可靠。
我们的转子保护结构,不仅在与物体接触时起到了缓冲的作用,在感应危险接触时触发进一步的刹车系统,快速地在0.06s内对旋翼进行刹车,防止了进一步可能的伤害。
(5)结构较为简单,成本较为低廉。
系统由转子结构,红外光学感应原件,迷你型单片机以及一些连接装置组合而成,无需昂贵的传感装置也无需设计避障系统,成本十分低廉。且其结构与原理十分简单,无需复杂的使用说明,即使是最初级的用户也能有效地使用。
4 实验
为了验证我们的无人机旋翼保护装置的实用性与可靠性,我们分别就刹车效率和保护性能两部分对保护系统进行了相应的测试。
4.1 刹车效率
我们通过实验多次在旋翼桨叶最大转速下触发制动系统,用以测试旋翼保护系统的制动响应速度与对桨叶刹车使其停止转动的时间。
旋翼转速最大时约为2300r/min,同时转子的转速约为200r/min。触发制动动作时,制动系统可以保证处理感应型号并做出响应时间时间范围在0.0100~0.0150s,最小感知延迟为0.0108 s。这样,我们可以得到触发制动刹车系统的激活延迟时长,即系统响应时间t1。
我们利用一台使用4000赫兹快门的高速摄像机对旋翼制动减速的时间进行了测量,同时我们也可以通过视频中旋翼桨叶的旋转方向及转一周所用时间计算出旋翼桨叶的瞬时速度,并且获得旋翼桨叶最终停止所花费的时间,即制动减速时间t2。
最后我们利用
T=t1+t2
可以计算得出从感应信号系统接触到外部物体到触发系统响应最终完成桨叶制动减速的总时长,即响应制动时长T。
通过实验数据我们可以得出结论触发事件到转子减速启动,测量延迟为0.0118s。旋翼桨叶需要0.0474s后才能完全停止。总响应制动时长约为0.0592s,能够保障在手指接触到旋翼桨叶前,旋翼已经完全停止。
4.2 保护性能
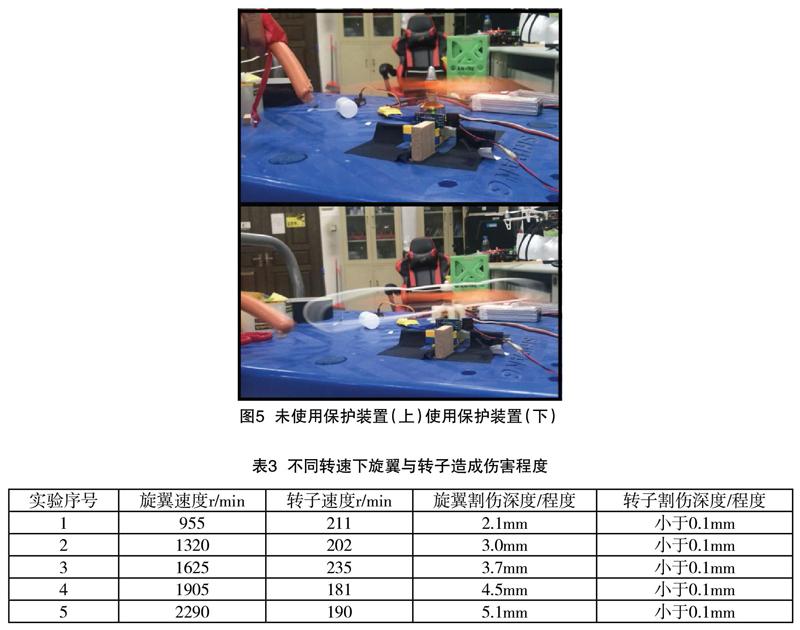
为了检验旋翼保护系统的保护性能,我们使用精肉制作的火腿肠代替人手指测试加装旋翼保护装置时旋翼桨叶对于人体的伤害,并与未加装旋翼保护装置时进行比较。我们通过实验比较转子和旋翼桨叶对手指造成的最大划痕深度来评估每次撞击的严重程度(见图5),结果见表3。
研究实验发现,对于无保护装置的旋翼桨叶冲击,手指在5次实验中均被每一片桨叶割伤,割伤伤口深度在2.1~5.1mm间不等,可以看到用精肉火腿肠模拟的人手指明显被割烂后飞溅。相比之下,安装了旋翼保护装置在5次测试中,转子对手指造成的伤害几乎看不出,通常小于0.1mm深。
我们很容易得出结论,旋翼叶片高速转动时,对于手指的冲击力较高;加装旋翼保护装置时,转子以远小于旋翼叶片速度转动且材料硬度更小、弹性更大,对于模拟人手指不会造成肉眼可见的伤害,防止了人手与桨叶进一步接触。当手指更深入触碰到旋翼桨叶时,旋翼保护系统已经完成了对旋翼桨叶的快速制动,旋翼已经完全停止。
与未安装保护装置的旋翼桨叶相比,安装了旋翼保护装置的桨叶对于伤害人体的危险将极大程度地减少。
5 结语
综上所述,我们针对于预防无人机旋翼桨叶伤人,提出了一种创新的旋翼保护装置,其具有以下五大优势:全方位防护、重量轻体积小、气动性能影响小、保护性能强、成本低廉。该保护装置能够大幅度减少用户在使用无人机时遇到的潜在威胁,相信在未来具有良好的应用前景与参考意义。
参考文献
[1] 秦博,王蕾.无人机发展综述[J].飞航导弹,2002(8):4-10.
[2] 岳基隆,张庆杰,朱华勇.微小型四旋翼无人机研究进展及关键技术浅析[J].电光与控制,2010,17(10):46-52.
[3] 王志港,郝传柱.基于陀螺仪的无人机保护装置[J].现代信息科技,2019(16):170-171.
[4] 周茂繁.四旋翼无人机保护罩结构设计[J].南方农机,2019,50(10):145.
[5] 陈谣,黎嘉明,葛旭文,等.四旋翼飞行器三维防撞系统设计[J].科技资讯,2015,13(26):255-256.
[6] 田鹏,李泽滔.基于单片机的红外避障系统设计[J]. 自动化与仪器仪表,2015(6):46-48.
[7] 郝文杰,刘浩,程吉利.基于红外探测的四旋翼飞行器保护装置设计[J].电子制作,2014(8):17-18.
[8] 张云秀,曾庆达,张炜.无人机发展综述[J].河南科技,2017(9):58-59.
[9] 孫硕硕,杨东,郭刘飞,等.基于单片机的红外避障导盲仪系统设计[J].黄河科技学院学报,2020,22(5):39-40.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
北京航空航天大学学报(2016年8期)2016-11-16
人间(2016年26期)2016-11-03
现代园艺(2016年17期)2016-10-17
现代园艺(2016年17期)2016-10-17
