车地协作缩短行车许可方案研究
2020-02-22 08:36:44李启翮
控制与信息技术 2020年6期
李启翮
(湖南中车时代通信信号有限公司 北京分公司,北京 100070)
0 引言
列车运行即将进入车站进路时,若值班员突然取消已开放的进路,则可能出现列车冒进信号而闯入已解锁进路的风险,甚至引发冲撞、脱轨等严重事故。为此,在联锁系统中均设有接近锁闭的功能,即在信号机外方设置一接近区段,利用轨道电路、计轴等占用检测设备,一旦检测到接近区段被占用,则已开放信号的锁闭进路构成接近锁闭(此时若要取消进路,则需延时解锁),以确保即使列车无法停下而冒进信号,也不会发生危险。由于不同列车的制动性能不同,取消进路时的列车速度、与信号机的距离也不同,因此对接近锁闭区段的长度和延时解锁的时间这两个参数均按照最不利的情况进行设置,以确保行车安全。然而,随着高速铁路的发展,列车速度大幅度提升,接近区段也相应大幅度延长,解锁延时也需随之增加,这虽然保证了行车安全,但对运营效率却产生了不良影响。
列车运行控制系统(简称“列控系统”)是保障列车运行安全的关键子系统。中国列车运行控制系统(China train control system,CTCS)分为0~4 级,其中2 级和3 级系统用于高速铁路。目前我国高速铁路全线采用CTCS-2/CTCS-3 级列控系统以保障行车安全。针对当前接近锁闭存在的问题,结合列控系统与计算机联锁(CBI)系统,本文提出一种通过车地协作缩短列车行车许可的实施方案,其能够精确地确定进路是否可被安全取消而不必延时解锁,从而在保障安全的同时提高运营效率,且可适用于不设置占用检测设备的线路。
1 接近锁闭功能分析
1.1 接近锁闭
根据标准TB/T 3027-2015《铁路车站计算机联锁技术条件》[1],进路锁闭被分为预先锁闭和接近锁闭两种。预先锁闭应在进路选通、有关联锁条件具备时构成;接近锁闭则在信号开放、进路的接近区段被占用时构成。
以接车进路为例,如图1 所示,X 为进站信号机,X →X1 为接车进路,信号机外方为所设置的接近区段。在列车尚未进入接近区段时办理接车进路,此时进路处于预先锁闭状态,由于列车距离进路尚远(例如在P1位置),即使取消已办理的接车进路,列车也能安全停靠在信号机外方,因此可以在关闭信号机后立即解锁进路。而一旦列车进入接近区段(如在P2 位置),此时若要取消进路,则需要先关闭信号机再延时解锁,以防止列车因无法在信号机外停止而闯入接车进路。
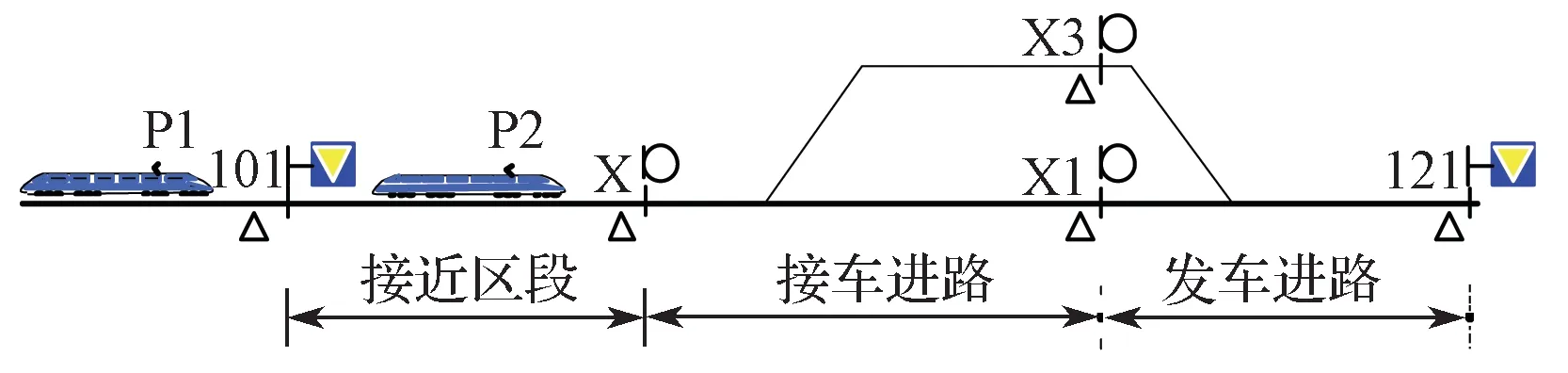
图1 接近锁闭示意Fig. 1 Schematic diagram of approach locking
1.2 接近锁闭参数设置
对于接近锁闭功能,最重要的参数包括接近区段的长度和延时解锁进路的延时时间长度。
1.2.1 接近区段长度接近区段由信号机外方的一段或数段轨道电路区段(或计轴区段)组成。根据文献[2],在列车即将占用接近区段前,值班员若突然取消进路,按规定速度行驶的司机要确认信号的变化,采取紧急制动措施并考虑设备动作时间,满足列车紧急制动距离的要求。以四显示自动闭塞为例,160 km/h 时速列车的紧急制动距离取1.4 km,接车进路的接近区段长度计算值为2.066 km(坡度为0)。
对于闭塞分区长度,需综合考虑列车的制动距离、追踪间隔、信号制式及轨道电路的极限长度等因素并经计算而确定,其中制动距离决定了闭塞分区最小长度[3]。例如在采用四显示制式、车速处于120~160 km/h 等级范围、坡度为0 时,可算出1 个闭塞分区最小长度为1.363 km[3]。因此通常只要设置1 到2 个闭塞分区作为接近区段就足够了。
显然,上述研究成果是基于普速铁路,而高速铁路车速更快、列车的安全防护功能主要由列控系统而不是司机完成的,因此计算方式有所区别,但列车的制动距离仍然是计算的基础。我国对200 km 时速及以上的动车组的紧急制动距离要求如表1 所示[4-5]。

表1 国内高速列车紧急制动距离和减速度Tab. 1 Emergency stop distance and deceleration of train in China
由表1 可见,制动距离随着车速的提高而增加,这意味着在高铁线路上,接近区段长度比普速线路大大增加。当前CTCS-3 级(简称“C3”)线路都是按照350 km/h 以上速度标准进行建设,如京沪高铁是按照380 km/h 速度标准建设,在2010 年底的京沪先导段联调联试中曾按照400 km/h 的最高速度进行信号系统的ITC(installation,test,commission)测试,目前京沪高铁已经在降速后又重新开通350 km/h 的车次。尽管在同一条C3 线路上还存在250 km/h 速度的混跑列车(以京沪高铁为例,白天不同车次之间旅行时间的最大差距可达2 h,相差近50%),但基于最不利的角度,接近区段的长度必须按照线路设计的最高时速考虑,再结合动车组运营场景,以尽可能地减小列车紧急制动的概率,提高旅客乘车的舒适性。因此新版铁路行业标准TB-10007-2017《铁路信号设计规范》[6]在6.2.13 条对接近锁闭区段长度进行了规定,具体如下:
(1)CTCS-3 级区段,接近锁闭区段长度不小于列控车载设备与RBC 最大允许通信中断时间内列车按设计速度运行的距离与列车最大常用制动距离之和;
(2)CTCS-2 级区段,接近锁闭区段长度不小于列车按设计速度运行时的最大常用制动距离;
(3)其他区段,不小于列车按设计速度运行时的紧急制动距离。
按照上述规定要求,根据车地通信中断时间(20 s)[7],可以计算出当坡度为0 时,时速400 km 和350 km 列车的接近区段长度分别不小于18.295 km 和14.771 km;而若考虑最大坡度(-20‰),则400 km 时速列车接近区段长度将超过30 km[8]。
1.2.2 接近锁闭延时
发生接近锁闭后,若要取消进路,则可能出现信号为红灯而列车无法停车的情况,因此关闭信号后,进路需要延时解锁,以保证行车安全。文献[9]指出,延时必须大于司机确认信号后采取紧急制动措施到列车停住的时间,这样就能防止列车走行时道岔转动,从而保证行车安全。该研究是基于普速线路;对于高铁线路,则要考虑联锁向地面列控系统发送进路降级状态的时间和车载列控设备收到地面列控设备所发的紧急命令后采取最大常用制动到列车停住的时间。
以接车进路为例,对于普速铁路,当前标准[1,6]所规定的延时时间为3 min;对于高速铁路,CTCS-2等级(简称“C2” )的线路同样是3 min,而C3 等级线路的延时规定为4 min。该规定的依据是:对于时速160 km 及以下的列车,可以算出司机确认时间加上紧急制动时间,该值不超过78 s[9](坡度为0 时),远小于3 min,因此延时是足够的。对于C2 线路,当最高时速不超过300 km 时,制动时间约为80.2 s,因此3 min 延时依然足够。对于350 km/h 的C3 线路,制动时间为97.5 s,而当坡度最大时将达到159 s[8],再加上20 s 的车地通信断开时间,已经达到了3 min,因此标准规定的延时为4 min。
1.3 接近锁闭存在的问题
从上述分析可以看出,接近锁闭区段的长度将随着列车速度的提高而增加,延时解锁的时间同样需要增加,这将导致如下问题:
(1)延时解锁的时间和接近区段长度必须按照最不利的情况进行设置,不能根据具体列车的速度/制动性能进行个性化的设置。例如在C3 线路上(C3 线路上均有C2 级列车混跑),即使当前接近列车的实时速度仅为200 km/h 且距离信号机尚远,完全能够直接解锁进路,但根据规定也需要延时4 min,这影响了运营效率。
(2)线路速度值越高,延时越长,对效率的影响越大。例如,当线路速度提升到400 km/h、坡度为-20‰时,接近区段长度将超过30 km,延时不能小于292 s。
(3)处于研究规划中的CTCS-4 级(简称“C4”)列控系统,将使用移动闭塞并取消地面的轨道占用检测设备,导致联锁因无法判断通过检测接近区段是否被占用而确定是否设置接近锁闭,此功能将不再可用。
由上述分析可以看出,对于C2 及以下等级的线路,接近锁闭对效率的影响可以接受;但对C3 及以上等级线路,影响较大甚至不可用。
2 CTCS 列控系统
2.1 CTCS 系统简介
列控系统根据列车在线路上运行的客观条件和实际情况对列车的运行速度和制动等进行监控,从而保障列车运行安全。
我国铁路规划的CTCS 系统是参考欧洲列控系统(European train control system,ETCS)并结合我国铁路的实际情况而制定的,共分为0~4 共5 个等级,当前在用的有CTCS-0/2/3 共3 个等级,而1 级和4 级尚处于研究规划之中。
2.1.1 CTCS-3 级系统
CTCS-3 级系统是我国当前最先进的列控系统,适用于350 km/h 及以上标准的线路(京沪是380 km/h 的标准),满足3 min 追踪时间间隔要求。自2009 年12月开通武广高铁线路以来,截至2019 年5 月,国内已经开通11 788 km 的C3 线路。C3 系统是基于ETCS-2级(简称“E2”)系统而制定的,其需求规范[10]制定时,选取ETCS 系统需求规范基线2 版本[11]中适用于中国高铁的部分,去掉一部分仅适用于普速线路和欧洲线路的特征(例如多种供电制式、多种车辆限界、无线盲区等),并结合C2 系统作为后备模式。C3 系统是E2系统在中国的本地化实现,也可被认为是世界上部署最广泛的一个E2 系统,因此可认为E2 系统与C3 系统是兼容的,装备E2 系统车载设备的列车也可在C3 线路上运行。
E2/C3 系统的地面核心设备是无线闭塞中心(radio block center, RBC),它通过与计算机联锁(CBI)、调度集中(CTC)等地面设备交互来获取线路的地面状态信息,通过GSM-R 无线网络与列控车载设备(车载ATP)实时通信以获取列车状态信息,再综合车地信息,计算出控车命令(如行车许可/紧急命令等),该命令经由无线信道及时发送给列车,车载ATP 根据收到的控车命令来控制列车安全运行。
2.1.2 CTCS-4 级系统
CTCS-4 级系统目前尚处于研究状态中,其规划也是以ETCS-3 级(简称“E3”)系统为基础而制定的。在规划中,其控车方式与C3/E2 系统相似,车载ATP与地面的RBC 之间同样采用车地双向无线通信的方式收发控车命令。其与C3/E2 系统的主要区别在于:
(1) 轨旁不再配置占用检测设备(如轨道电路、计轴等);
(2)列车完整性情况由车载设备报告给地面;
(3)地面所发送的行车许可采用移动闭塞制式(C3为准移动闭塞制式,依然以闭塞分区或进路为单位)。
2.2 C3 线路上取消进路过程
在C3 线路上,取消进路和人工解锁进路都是采用缩短行车许可(shortening movement authority,SMA)的方式实现的。如图2 所示,当车站办理了接车进路后,CBI 通知RBC 该进路已经办理,RBC 根据计算结果向车载ATP 发送“可以延伸至X1”的行车许可,此时若要取消进路,则关闭信号机X,CBI 立即通知RBC,RBC 据此计算新的行车许可(终点缩短至X)并通过无线网络发送给车载设备。若列车距离X 尚远,则可以平稳停车于X 外方;若列车距离X 很近(已进入接近区段),则可能立即触发最大常用制动甚至紧急制动,且有可能越过X 导致冒进。因此,采用此种控车方式,必须结合接近锁闭功能:当列车进入接近区段后,进路解锁必须延时。
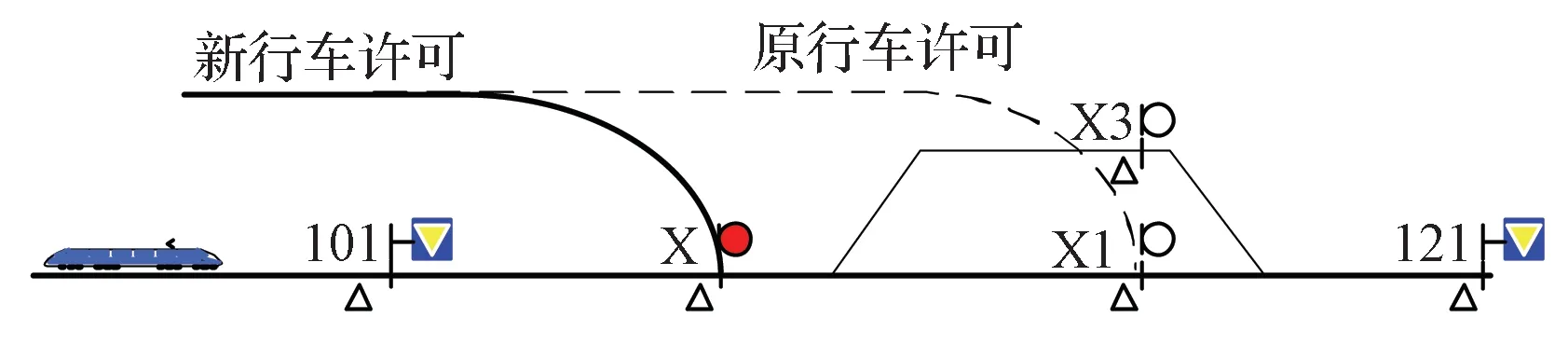
图2 取消进路与缩短行车许可示意Fig. 2 Schematic diagram of SMA and release route
针对C4 系统,由于不再设置轨道占用检测设备,既有的接近锁闭方法不再可用;为保证安全,只能将所有锁闭均按照接近锁闭功能处理(不再设置预先锁闭),即只要解锁进路,均应按照接近锁闭进行延时解锁。显然,这将对运营效率产生更大的影响。
3 协作缩短行车许可规范介绍
由前述分析可以看出,随着线路速度的提高(C3及以上等级线路),既有的接近锁闭功能对效率的影响逐渐增加,且不能根据具体接近列车的速度、距离及制动性能进行针对性的控制。
假设CBI 能判断接近列车能否安全停在信号机位置之前,则可以据此确定进路是否能立即解锁,而不需要通过设置接近区段和解锁延时来达到目的,这样既可提高运营效率,又不必依赖于占用检测设备。要确定是否能够停车,需要车地间的协作,即地面通知列车新的停车点,由列车根据自己当前的速度、位置等信息计算并判断是否能够停车并将结果报告给地面。显然,对于C3/C4/E2/E3 线路,可以先通过CBI 询问RBC,RBC再询问车载ATP,然后车载ATP 将结果报告给RBC,最后由RBC 通知CBI 的信息流交互实现这一功能。
实际上,ETCS 系统需求规范的第3.8.6 条规定有一个被称为协作缩短行车许可(cooperative shortening movement authority,CSMA)的功能,具体如下:RBC可以向车载ATP 发出一个比原行车许可(movement authority,MA)更短的新许可,车载ATP 会根据新的许可终点进行计算,若计算结果是列车不需要最大常用制动介入就可以平稳停在新终点之前(基线3 版本[12]进一步优化为当前列车前端位置尚未超过新许可的起模点),则接受新许可并回复RBC,否则拒绝新许可并通知RBC。显然,此条规范可被用于确定是否可以解锁进路:若列车接受新许可,则CBI 可以立即解锁不在新许可范围内的进路,反之则不可。该规范同样也考虑了旅客乘坐的舒适性,要求平稳停车,即不应触发最大常用制动和紧急制动。
CSMA 的功能没有被当前的CTCS 规范采纳,其原因在于:ETCS 标准仅针对车地之间互联互通相关部分进行了规范,并未对RBC 与CBI 之间的交互功能进行规定,也没有给出此功能的具体实现方案与场景,而CSMA 功能的实现需要RBC 与CBI 之间的交互。虽然出于谨慎起见,在初期制定CTCS 规范时未对国内成熟的联锁功能进行修改,暂时放弃了该功能[13],留待日后处理(实际上在旧版C3 系统需求规范里虽然没有CSMA 相关功能,但当时还保留了专用于CSMA功能的车地无线消息M9/M137/M138[14],新版规范中,依然继续保留上述消息[15]),但随着车速的提高以及未来CTCS-4 级系统的实施,实现CSMA 的功能将成为必然,因此本文针对该功能提出了一套完整的实现方案[16]。
4 CSMA 方案
4.1 CSMA 方案简介
根据上节的分析,本文提出以下CSMA 方案:
(1)当列车的行车许可(MA)包含了某条进路,RBC 则应通知CBI“该进路已被锁定”。
(2)CBI 若要解锁某条进路,而该进路尚未被MA 锁定,则直接解锁(若有线路上有低等级列车混跑,则按照低等级列车接近锁闭的要求进行操作);若已经被使用,则向RBC 发起解锁请求。
(3)RBC 根据解锁请求,向车载ATP 发送新的行车许可,询问是否能停在新的许可终点前方。
(4)列车根据自身速度、与新终点的距离等参数进行计算,以确定是否接受新的许可,并将结果报告RBC。
(5)若列车报告接受新的许可,则RBC 通知CBI可以取消,否则通知CBI 不能取消。
(6)若CBI 收到取消允许,直接解锁进路,否则保持进路锁闭。
要实现上述功能,需要地面设备间接口协议的配合。当前C3 系统的RBC-CBI 接口规范中共规定了3 套协议[17]:其中协议2 是目前国内应用最广泛的协议,已经应用于近10 000 km C3 线路,但由于每周期通信量不固定,已经不被推荐;协议3 仅用于郑西客专,由于缺少灾害信息,也不被推荐使用;协议1 是在协议3 的基础上增加了灾害信息和用于安全冗余校正的信号机和道岔信息制定而成,是今后推荐使用的协议。
在协议1 中,CBI 向RBC 发送的消息中的进路信息按顺序排列,每条进路使用4-bit 描述其状态,取值(0~4)含义见表2;而RBC 向CBI 发送的消息中仅有生命信号,没有任何应用信息。
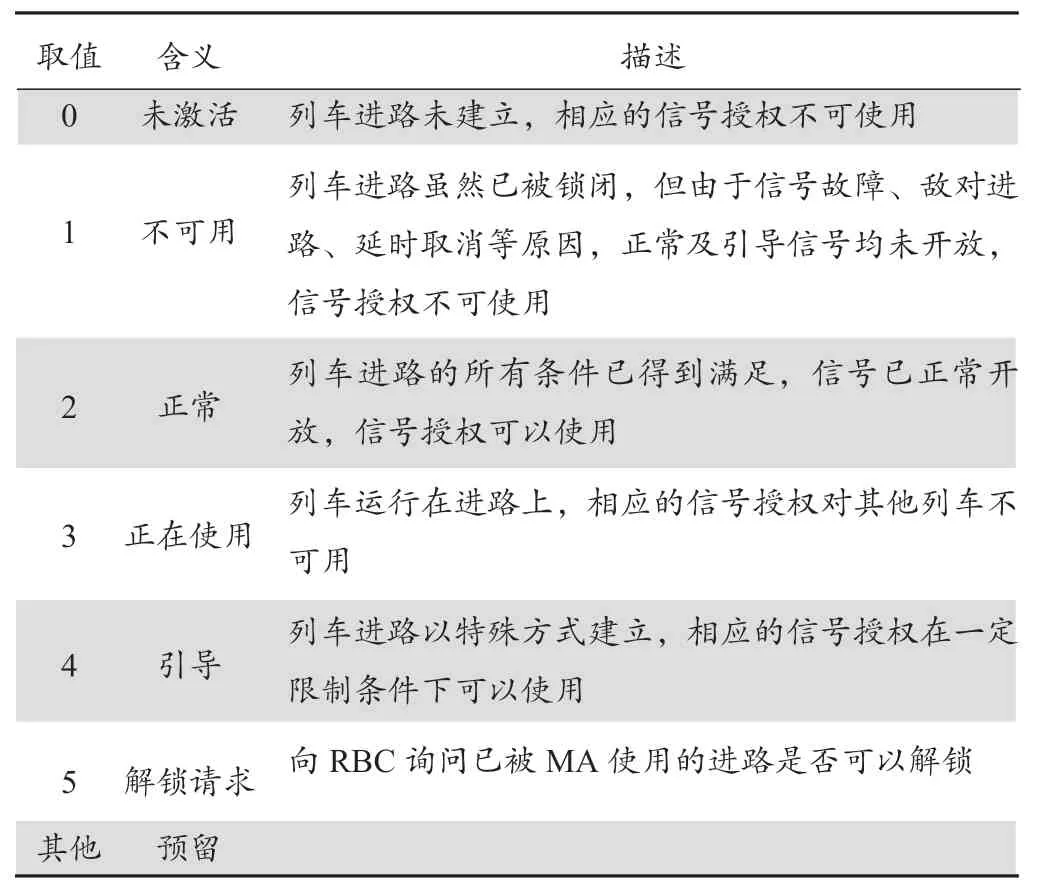
表2 CBI →RBC 进路信息Tab. 2 Route information sent from CBI to RBC
要实现CSMA 功能,只需要对CBI →RBC 消息中的进路信息增加一个状态取值,见表2(取值为5);对RBC →CBI 的消息,则需增加进路信息子域,针对每条进路,使用2-bit 即可(2-bit 取值可为0, 1, 2, 3,刚好可以表示所需的4 种状态),取值设计如表3 所示。

表3 RBC →CBI 进路信息Tab. 3 Route information sent from RBC to CBI
本方案通过对既有协议进行简单扩充,使得协议能够满足CSMA 功能的实现,从而使CSMA 功能可以最小的代价增加至CTCS 系统中。
4.2 CSMA 工作场景
4.2.1 正常工作场景
该方案的正常交互场景分为两种情况:(1)列车在一个RBC 管辖范围内运行时发生的CSMA;(2)列车接近RBC 管辖范围边界触发了RBC-RBC 交权功能时发生的CSMA。
非交权条件下的CSMA 如图3 所示,其中Alt 表示CSMA 流程里不同情况的分支,上半部分为能停车的分支,下半部分为不能停车的分支;M 后跟随数字表示ETCS 规范[12]定义的标准消息,如M9 表示地→车消息“请求缩短行车许可”,M137 表示车→地消息“同意缩短行车许可请求”,M138 表示车→地消息“拒绝缩短行车许可请求”。在非交权条件下,当某条已被RBC锁定(已经用于某列车的行车许可)的进路需要被取消时,CBI 将向RBC 发送“请求解锁该进路”的消息,RBC 收到该请求后,立即向正在使用该进路作为行车许可一部分的列车发送消息M9,询问列车车载ATP 是否能在新MA 终点前(即欲解锁进路的起点)根据收到的M9 所指明的新MA 终点来计算新的MA 及控车曲线:若此时列车前端尚未越过新许可的起模点,则用新的MA 替代旧的MA,并向RBC 回复消息M137,RBC收到后通知CBI 同意其请求(进路解除行车许可锁定),然后CBI 可以立即解锁进路而不用延时;反之,若发现列车前端已经越过新MA 的起模点,则继续使用旧的MA,并向RBC 回复消息M138,RBC 收到M138 后通知CBI“请求被拒绝”,CBI 不再解锁进路。
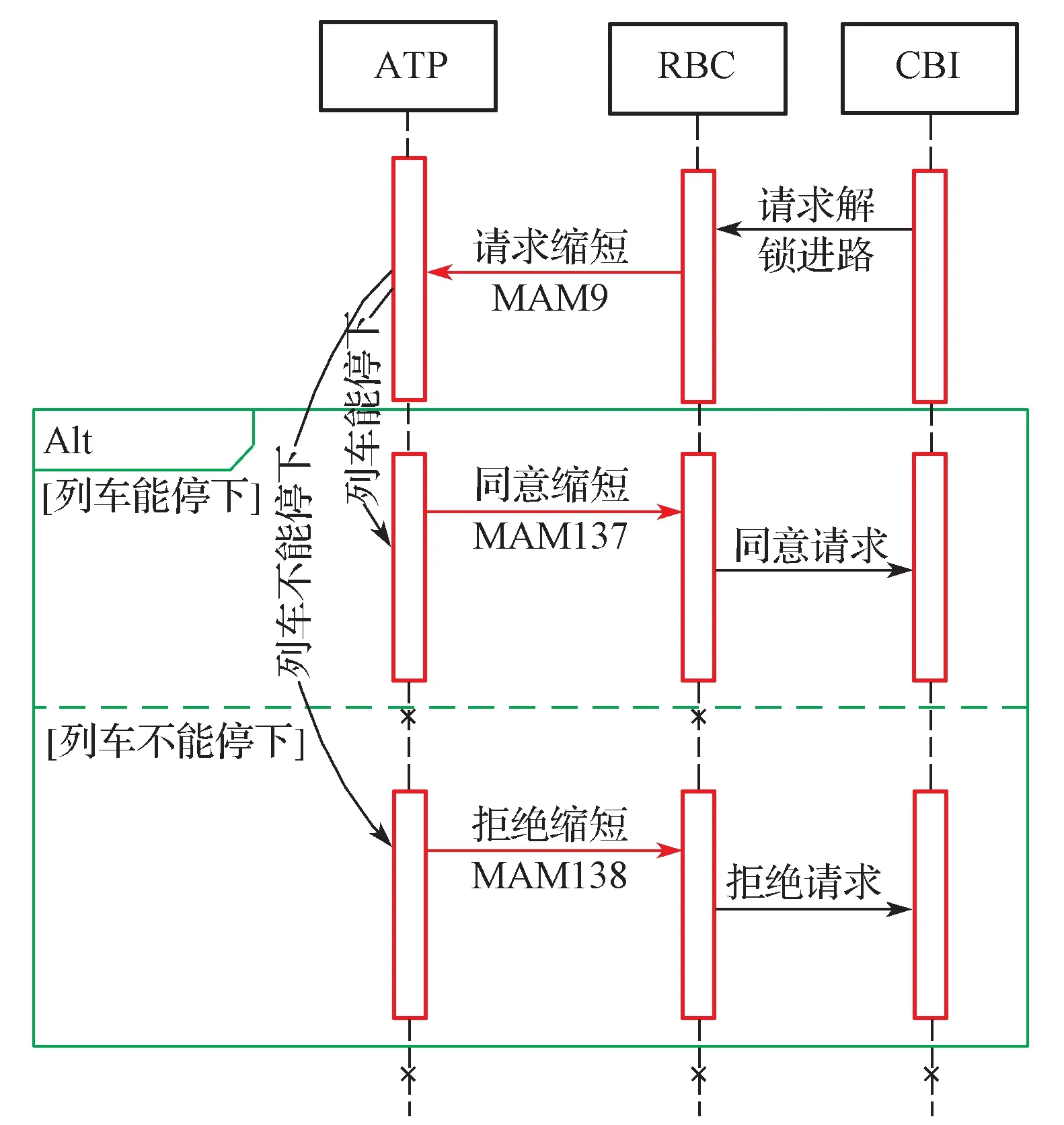
图3 非交权条件下的CSMAFig. 3 CSMA under the condition without handover
交权条件下的CSMA 如图4 所示,其中M224 表示交权过程中接收RBC 发送给移交RBC 的“请求进路相关信息确定”消息;M206 表示交权过程中由移交RBC 发给接收RBC 的“进路相关信息确定”消息[18]。在交权条件下,相比非交权条件,多了一个接收RBC和移交RBC 之间的交互流程:当CBI 向接收RBC 发送“请求解锁”后,接收RBC 需要用消息M224 询问移交RBC 是否可以确定缩短其此前发送的进路相关信息(route related information, RRI)到新终点,移交RBC 根据M224 所指明的新终点按照与非交权流程相同的方式和车载ATP 之间采用消息M9 和M137/M138进行交互,以确定是否能够停车。若能够停车,则用消息M206(将其中确定状态设置为“能确定”)告诉接收RBC“可以停车”,然后接收RBC 据此通知CBI 同意其解锁请求,CBI 可以立即解锁而不用延时;如果不能停车,则移交RBC 用消息M206(将其中确定状态设置为“不能确定”)通知接收RBC“无法停车”,接收RBC 据此拒绝CBI 的请求,CBI 将不再解锁进路。
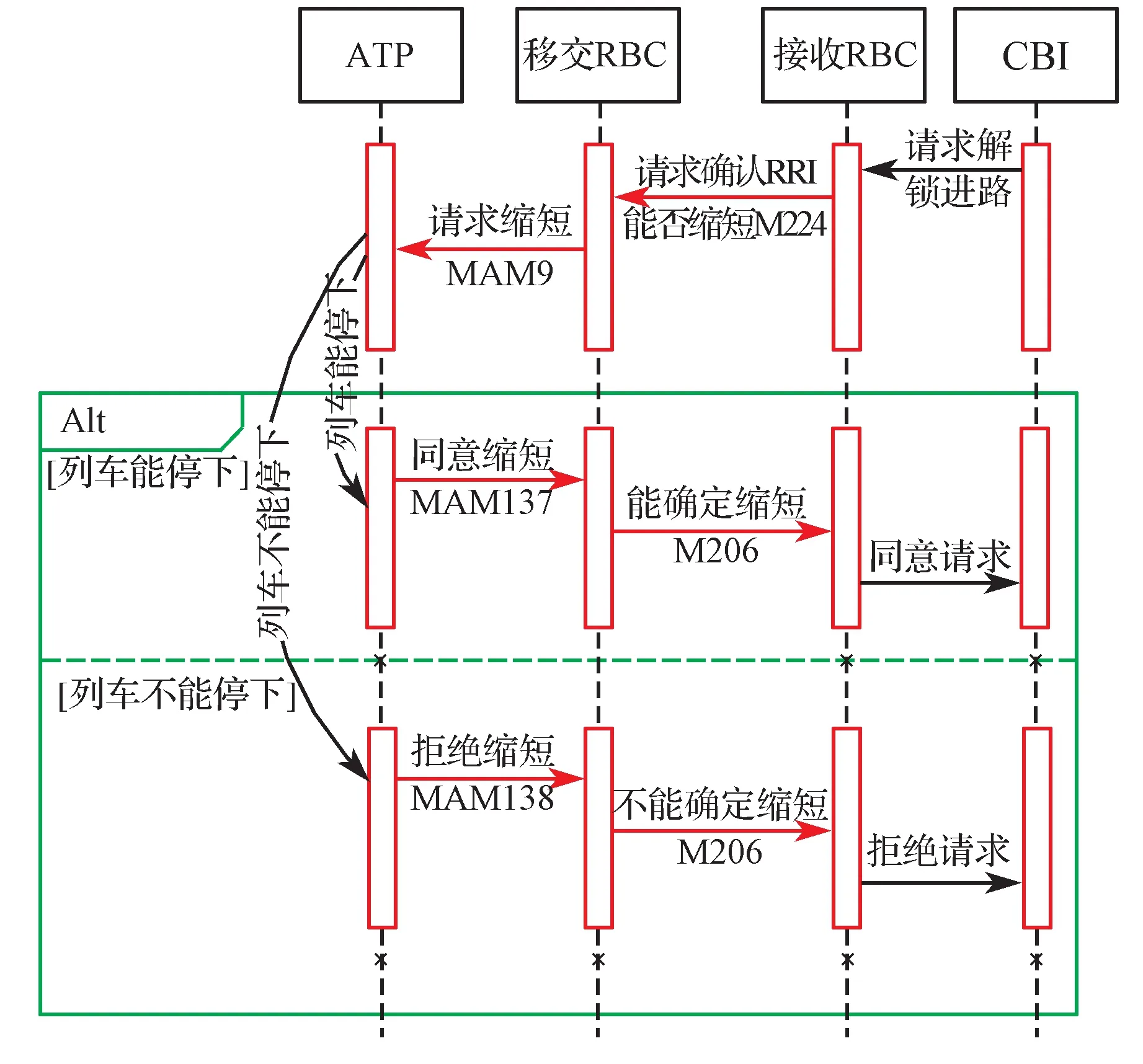
图4 交权条件下的CSMAFig. 4 CSMA under the condition of handover
4.2.2 异常工作场景
实际运行中,必须考虑异常运行场景,即CSMA处理流程期间,又需激活其他紧急条件下的处理,包括缩短行车许可SMA、无条件紧急停车(unconditional emergency-stop message, UEM),才能保障列车运行安全。
非交权条件下,若RBC 发送M9 之后在原行车许可范围内激活了SMA 条件,则RBC 应立即向车载ATP发送新的SMA(终点为激活的SMA 终点和CSMA 终点中距离列车更近者),同时向CBI 发送“解锁拒绝”消息,结束CSMA 流程;若RBC 发送M9 之后激活了UEM 条件,则RBC 立即向车载ATP 发送UEM,同时向CBI 发送“解锁拒绝”消息,结束CSMA 流程。
交权条件下,移交RBC 发送M9 之后,在原行车许可的自身管辖范围内激活了SMA 或UEM 条件,则按照非交权条件下的方式向车载ATP 发送SMA 或UEM,同时向接收RBC 发送的M206 无法确定,接收RBC 向CBI 发送“解锁拒绝”消息;接收RBC 在收到M206 之前,正常条件下不再发送RRI。若此期间在RRI 范围内激活了SMA 或UEM 条件,应立即向移交RBC 发送新的进路相关信息RRI,并向CBI 发送“解锁拒绝”消息。移交RBC 收到新的RRI 之后,退出CSMA 流程,并根据新的RRI 向列车发送新的MA。
通过对上述异常场景进行规定,防范了此CSMA方案运营中的风险,进一步保证了行车的安全性。
4.3 CSMA 应用
4.3.1 C2 及以下等级线路对于C2 及以下等级线路,由于列车只能单向接收地面信息,因此,无法使用CSMA 功能。
4.3.2 C4/E2/E3 等级线路
本文所提出的方案可用于纯C4/E2/E3 线路,以替代接近锁闭。若RBC 没有通知CBI 某条进路已经被RBC 锁定(“RBC 锁定”代表已经被用于某列车的MA),则CBI 可以直接解锁该进路;若RBC 已经通知CBI 某进路被其锁定,则CBI 应通过CSMA 流程确定是否可以解锁该进路。
4.3.3 C3 等级线路
针对C3 线路,由于C2 系统是C3 系统的后备模式,在C3 线路上始终存在C2 列车与C3 列车混跑的情况,因此接近锁闭功能还需要保留,但只需要按照C2 标准进行设置即可(这样可将接近锁闭的解锁延时缩短1 min,接近区段长度也相应缩短)。也就是说,当进路被RBC通知已锁定时,按照CSMA 流程进行解锁;当进路被RBC 通知未锁定时,按照原接近锁闭功能进行控制。由于C2 列车速度较低,接近区段长度较短,延时与普速线路的相同,所以使用该功能后仍然能够提高C3 线路的效率;而对于海外广泛使用的E2 线路,通常都不使用后备模式而直接降级至人工驾驶模式,因此更适合使用CSMA 功能。
由于该功能判定列车是否停稳是基于不使用最大常用制动和紧急制动的前提,因此该功能的使用还保证了旅客乘坐的舒适性。
4.3.4 道口控制
我国的C3 系统仅规划用于高铁线路(不设置平交道口),而海外的E2 系统则还可用于包括了平交道口的普通线路。对于平交道口,也有部分采用了由联锁通过接近锁闭进行控制的方式,即若列车未进入道口接近区段,则可以立即抬起栏木,否则不能。
针对此类线路,也同样可以使用CSMA 功能:若行车许可范围内包含该道口,则由RBC 通知联锁 “道口锁定”;若要抬起栏木,需要先向RBC 申请,RBC询问列车能否停下后,再通知联锁。方案流程与进路解锁类似,此处不再赘述。
5 结语
针对列车速度提高后进路接近锁闭功能对运营效率的影响以及C4/E3 线路无法使用接近锁闭的问题,本文提出一种完全符合ETCS 规范的车地协作缩短行车许可方案。其在保障列车安全运行的同时不仅可以提高C3线路的运营效率,而且还能在纯E2/E3/C4 线路上替代接近锁闭功能,并提高了旅客乘坐的舒适性。此外,该方案还可以扩展至道口控制。根据列车运行中可能遇到的CSMA 相关的各种正常异常场景,依据本方案我们共编制140 个相关测试用例并进行了半实物仿真测试。结果显示,无论是车站进路解锁还是道口控制,该方案的实现均达到了预期目的。目前,该方案的实现已经通过欧洲铁路技术互联互通(TSI)认证,为采用本方案的信号系统应用于欧洲以及承认欧洲标准的国家和地区提供了支持,在国家“一带一路”倡议下,能更好地帮助我国信号系统参与海外竞争。
猜你喜欢
自动化仪表(2020年10期)2020-11-13 03:31:00
铁道通信信号(2020年8期)2020-02-06 09:13:18
中国公共安全(2017年11期)2017-02-06 05:28:09
汽车与安全(2016年5期)2016-12-01 05:22:12
船舶力学(2015年6期)2015-12-12 08:52:20
电源技术(2015年2期)2015-08-22 11:28:14
汽车维修与保养(2015年12期)2015-04-18 07:51:46
现代企业(2015年4期)2015-02-28 18:48:11
中国交通信息化(2014年4期)2014-06-05 03:51:17
汽车维护与修理(2014年10期)2014-02-28 12:15:01