基于扩展卡尔曼滤波的汽车行驶状态估计
2020-02-14 06:10谭光兴符丹丹丁颖王雨辰
广西科技大学学报 2020年1期
关键词:信息融合
谭光兴 符丹丹 丁颖 王雨辰
摘要:在车辆行驶中,某些状态参量的准确获取对线控转向系统有着重要的作用,但状态参量测量成本高或难准确测量。因此,针对汽车线控转向系统,为了以较低成奉获取准确的车辆运动状态,先建立一个三自由度的非线性车辆模型,搭建多传感器网络(转角传感器、加速度计)采集车辆行驶状态;应用扩展卡尔曼滤波理论建立信息融合算法,通过易测的车辆状态信息(转向盘转角、纵向加速度、侧向加速度)融合得出所需的难测车辆状态(横摆角速度、纵向车速);最后搭建仿真平台在双移线工况和角正弦工况下进行仿真验证,并且与无迹卡尔曼滤波算法估计结果进行对比。结果表明,该估计算法能够准确的估计出午辆行驶过程中的状态参数。
关键词:线控转向系统;扩展卡尔曼滤波;信息融合
中图分类号:u463.4DOI:10.16375/j.cnki.cn45-1395/t.2020.01.003
0引言
线控转向技术(Steer-By-wire,SBW)的出现给汽车转向系统带来了新的发展。线控转向系统可以自由设计转向系统的角传递特性和力传递特性,对提高“人-车-路”闭环系统的主动安全性和操纵稳定性都起很大的作用。SBW系统随着其安全性和可靠性的提高将成为未来发展的主流方向。SBW系统将转向盘和转向轮之间的机械连接换成了电子线路控制,为驾驶员提供更方便和安全的驾驶,但线控转向系统车辆在转向过程中由于信息的多样化、复杂性等因素制约,急需一种低成本、准确的方法获取车辆状态参数。
丁红等结合汽车电子稳定性控制系统,利用运动学和车辆动力学模型,进行了车辆非线性状态估计;林程等基于自适应理论提出一种补偿更新率自适应控制的估计方法;Wenzel等利用两个Kalman滤波器并行工作的方法来估计车辆的状态和参数;Best等利用一种车辆状态参数联合估计的方法进行估计。除此之外,GPS/INS组合导航系统和RTK五轮仪等车载传感器也逐步应用在线控转向系统中,能够更方便地获取状态参数。然而上面的估计方法让算法的求解更复杂。同样,这些车载传感器虽然使用方便,却让车辆制造成本直线上升。因此,信息融合这一门新兴的学科被应用于车辆状态估计。本文基于扩展卡尔曼滤波(Extended Kalmarl Filter,EKF)理论提出一种对车辆状态进行估计的信息融合算法,该算法将车载传感器测量到的信息进行融合,完成对汽车的横摆角速度和纵向车速的估计,并通过Carsim与Matlab/simulink联合仿真实验验证估计算法的有效性。
1卡尔曼滤波理论与信息融合技术
1.1信息融合技术
信息融合技术涉及多个学科,属于信息领域的前沿技术,其理论和方法己广泛应用于各行各业。卡尔曼滤波算法因其准确、快速及信息多样性的优势备受青睐。时艳茹建立非线性自由度车辆模型,利用无迹卡尔曼滤波(unscentedKalmanFilter,uKF)理论,对车辆纵向速度进行估计。林棻等建立了二自由度汽车模型,利用粒子滤波算法估计汽车的行驶状态。由数据分析可知,UKF估计算法的计算量与EKF估计算法相当,但它只适用于连续可微的非线性系统,且对非线性函数的一阶线性化近似精度偏低,容易造成滤波估计数值稳定性差;粒子滤波估计算法虽然能较好的处理非高斯的滤波问题和非线性系统,但是该算法的实时性差并且容易粒子样本枯竭。EKF技术能够将非线性函数展开为Taylor级数,并略去一些高阶项,将非线性系统转换为线性系统,它的计算精度高、滤波稳定性强,更易于工程实现,在非线性程度低的线控转向系统车辆模型上,能够更好的进行信息融合,获取车辆状态參数。
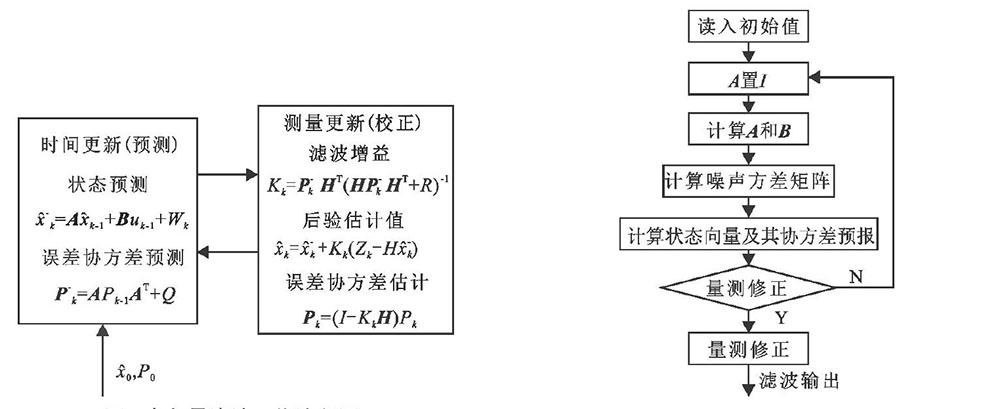
1.2EKF理论
对于非线性系统,EKF技术可以围绕滤波值将非线性函数展开为Taylor级数,并略去二阶等高阶项,进而适用卡尔曼滤波器。EKF属于一种次优估计,它在线性化过程中忽略了一些高阶非线性信息,但对于线控转向系统车辆模型这种非线性程度并不高的系统模型上的应用,也能得到较高的估计精度。在状态参数的估计过程中,信息融合系统的目的就是平滑目标过去的状态信息,然后对现有状态信息做出准确的估计,并获得目标未来的状态信息预测。
2基于EKF的信息融合估计算法
2.1车辆模型
由于车辆在实际行驶过程中,并不会固定直线行驶,无论是转弯掉头或超车的各种工况都会使车辆产生颠簸或者侧倾,故在建立车辆模型时会考虑到横摆和侧偏情况,此时车辆在纵向行驶时会具有非线性特性。因此,在线性二自由度车辆模型的基础上建立具有横摆、侧偏及纵向在内的非线性三自由度整车模型模型如图3所示。
车辆动力学模型方程式如下:
上述模型中,y——车辆横摆角速度,β——质心侧偏角;α1和α2——前、后轮的侧偏角;δ——前轮转角;αx和αy——车辆纵向和侧向加速度;Fy1和Fy2——前、后轮侧向力;V——车辆质心速度;vx和vy——车辆纵向速度和侧向速度。α——前轴到质心的距离,b——后轴到质心的距离;k1和k2——前后轴的等效侧偏刚度;Iz——质心转动惯量;m为整车质量。
2.2EKF信息融合算法
由上文可知,EKF是在滤波最优处进行忽略高阶项的一级泰勒展开,对非线性系统简单线性化。结合所建立的具有非线性特性的三自由度车辆模型,用其动力学方程构建EKF的状态、观测方程,并对激励噪声特性和测量误差特性进行统计。
1)状态方程和观测方程
yt=h(x(t),v(t))(6)
式中,x(t)——状态变量;u(t)——控制变量;y(t)——系统的量测输出;w(t)和v(t)分别为相互独立的系统激励噪声和量测噪声。
结合建立的非线性三自由度车辆模型,建立系统状态方程:
2)线性化模型
上文中提到F(t)和H(t)分别为f和h对x(t)的偏导雅克比矩阵,△t为采样时间,有式中,控制变量u=[δ,ak]T状态变量x=[y,β,vk]T;输出变量y=[ay];过程噪声协方差矩阵Q=I3×3;观测噪声协方差矩阵R=[10000];误差协方差矩阵的初值P-(t)=I3×3。
3算法仿真验证
本文利用非线性三自由度车辆模型,经由Carsim软件中的模型,在Simulink中建立车辆动力学模型。为了检验车辆状态估计算法的准确性,在Carsim-Simulink联合仿真平台上进行双移线工况仿真和角正弦工况仿真验证,并与UKF算法估计结果进行对比。选用车辆部分参数如表1所示。
3.1雙移线工况
双移线标准号为ISO 38888-2:2002,比较适用于综合测定搭建的汽车模型的操纵稳定性。本实验选取起始速度60km/h,路面附着系数u为0.9,传动比系数7,取样周期T为0.01s的双移线工况试验,车辆状态估计算法所需的纵向加速度测量值、侧向加速度测量值、车轮转角测量值等均由不同传感器测量得到,将其作为融合算法模型的输入,仿真得到纵向车速和横摆角速度的估计值,并与车速传感器采集的纵向车速、姿态传感器采集的车辆横摆角速度的测量近似值进行对比。图4和图5为EKF算法估计的仿真结果,图6和图7为UKF算法估计的仿真结果。
由上面的仿真图可明显看出:无迹卡尔曼滤波的车辆横摆角速度的估计值误差偏大,相比之下,扩展卡尔曼滤波下的车辆横摆角速度的估计值误差偏小,且在一定的范围内波动,更贴合于测量值,变化范围更贴近于双移线工况;基于EKF的车辆纵向车速估计值误差小,曲线更为平滑,且比基于UKF的估计算法精度更好,实时性更好。
采用EKF算法对车辆状态参数进行估计时,横摆角速度和纵向车速的误差曲线如图8所示,误差的最大值、均值、均方差值如表2所示。
由表2可知:横摆角速度和纵向车速在仿真实验过程中,误差的均值及均方差值都小于4%,仿真精度较高,能很好地体现算法的实用性和准确性。因此,可以确定本文建立的基于EKF的多传感器信息融合算法可以准确估计车辆行驶状态及参数。
3.2角正弦工况仿真
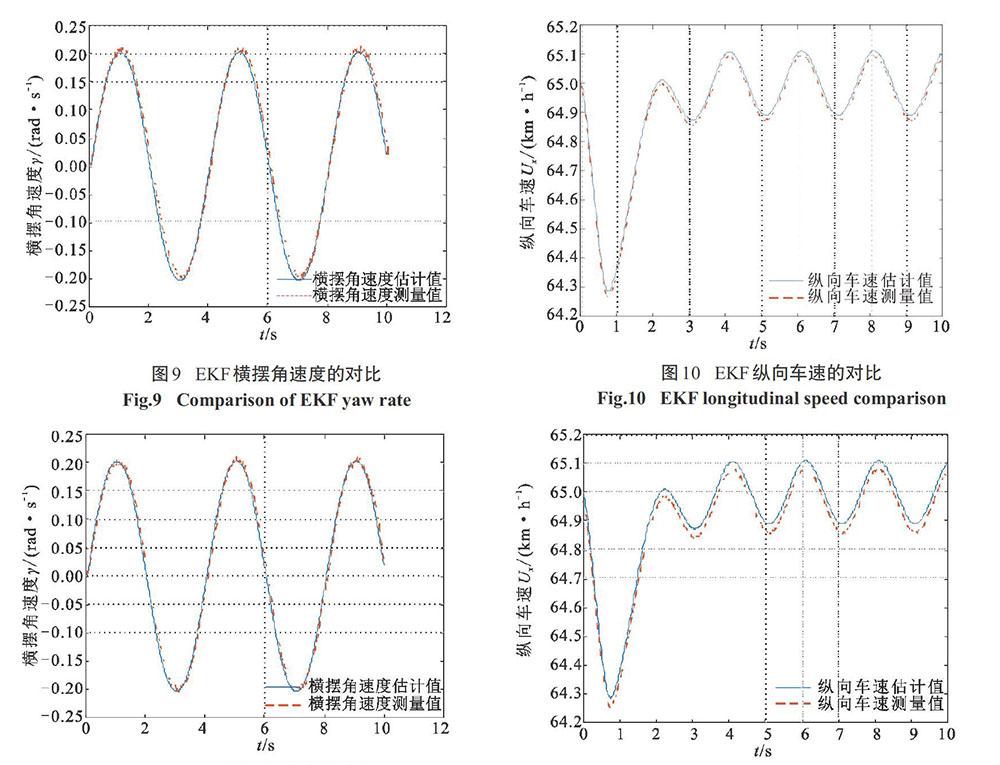
为了进一步检验车辆状态估计算法的准确性,在Carsim-Simulink联合仿真平台上也进行角正弦工况仿真验证。该实验选取起始速度为65km/h,路面附着系数U为0.8,传动比系数为7的角正弦工况试验,图9和图10为EKF算法估计的仿真结果,图11和图12为UKF算法估计的仿真结果。
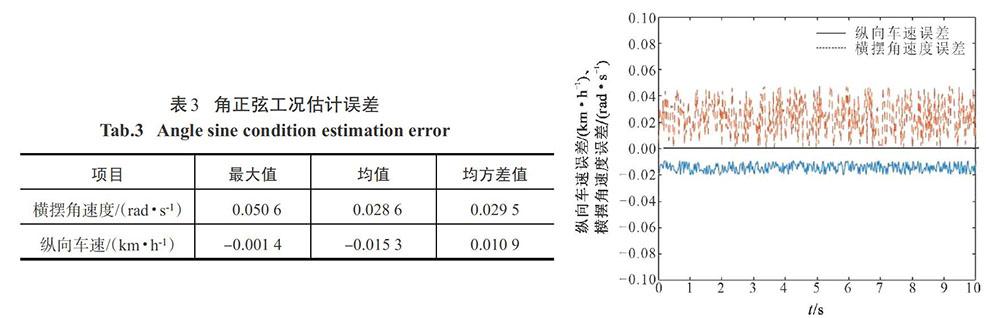
通过图9-图12的对比可知:基于UKF的车辆状态估计值有一定误差,基于EKF的车辆状态估计值的误差更小,更贴合于测量值,精度更好,实时性更好。采用EKF算法对车辆状态参数进行估计时,横摆角速度和纵向车速的误差曲线如图13所示,误差的最大值、均值、均方差值如表3所示。
由表3可知,横摆角速度和纵向车速在仿真实验过程中,误差的均值及均方差值均极小,仿真精度较高,能很好地证明基于EKF的多传感器信息融合算法可以准确估计车辆行驶状态参数。
4结论
EKF的车辆状态估计算法以三自由度的非线性车辆模型为基础,搭建多传感器网络采集车辆行驶状态,利用EKF理论建立了信息融合算法,利用少量的易测量的转向盘转角、车辆纵向加速度等当作输入信号,经过融合后得到横摆角速度、纵向车速等状态参量。为验证算法的有效性,进行双移线工况和角正弦工况的仿真实验,并且与UKF算法估计结果进行对比,结果表明该算法能够对车身纵向速度及横摆角速度进行准确估计,为路感模拟提供决策依据。
但该算法仅采用了简单的三自由度车辆模型,且只融合了方向盘转角、车辆纵向加速度等车辆状态参数。因此,在今后的研究中将融入车道线和交通标志的信息,利用多信息融合方法,设计SBW系统的路感,实现线控转向系统的实时性、舒适性以及操纵稳定性。
猜你喜欢
现代电子技术(2017年3期)2017-03-04
科技资讯(2016年28期)2017-02-28
计算机应用(2016年12期)2017-01-13
中国新通信(2016年21期)2017-01-06
现代电子技术(2016年22期)2016-12-26
亚太教育(2016年35期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
湖南大学学报·自然科学版(2015年8期)2015-09-06
物联网技术(2015年5期)2015-07-18
湖南大学学报·自然科学版(2015年2期)2015-04-20