基于极限学习机的老人防摔倒系统设计
2015-07-18 13:46沈雪微毛文涛
物联网技术 2015年5期
沈雪微++毛文涛


摘 要:如何提高老年人的健康和生活质量受到社会广泛关注,老龄社会的到来也给我们在校大学生提出了许多新的研究课题,介绍一种为高危年老人群设计的检测监护系统。系统的功能实现主要有两大部分组成,即利用WiFi技术,结合极限学习机算法的精确定位以及六轴加速度传感器融合相应算法实现的人体行为识别。介绍了关于系统方案设计、上位机程序的算法实现等,从多个角度诠释本系统,在当今老龄化趋势日益严重的大环境下,为社会提供一种特殊群体安全保障方案。
关键词:老龄化;实时定位;行为识别;信息融合;特征提取;ELM
中图分类号:TP391.4 文献标识码:A 文章编号:2095-1302(2015)05-00-04
0 引 言
1980年,我国全面推行计划生育政策,随着社会发展和计划生育政策的全面实施,我国人口渐趋老龄化现象已经受到社会各界的广泛关注,老龄社会的到来也给我们在校大学生提出了许多新的研究课题。
据估计,到2030年,中国人口的年龄结构将更趋向于老年人口多于青年人口的倒金字塔形。此外,目前中国城市老年人空巢家庭(包括独居)的比例已达49.7%,与2000年相比提高了7.7个百分点。
在当今老龄化趋势日益严峻、报道老年人事故频发的时代,为高危老年人群设计一种基于极限学习机的老人防摔倒检测系统迫在眉睫,本系统针对老年人和伤残病弱者及工作在高危场所人群等特殊群体而设计,由于他们是意外发生高危人群,容易发生摔倒等行为并且后果严重,因而实时监护十分必要。本系统的实现既减少了他们摔倒后因无及时相救可能产生的严重后果,又使得这些人的安全保障有了很大提高;另一方面也减轻了社会和子女的压力,是一件对全社会都有益的事情。
1 现状分析
1.1 市场分析
目前国内大多数针对高危特殊人群摔倒检测及处理的技术研究依然只停留在医疗照顾的消极被动层面。而在西方发达国家,特别是美国、日本,近些年,有许多大学和研究机构在政府和社会的支持下开展了人性化的、以改善老人生活品质、提升高龄体弱人群安全系数为目标的各种技术的研究工作。
1.2 需求分析
针对老年人活动特点,及感觉系统、平衡能力减退等特点,当前需要开发一套摔倒检测监护系统。此系统具有利用WiFi技术实时定位的功能,还能够通过六轴加速度传感器获取数据,结合有效算法对老年人活动行为进行监测,及时发现危险并得到救助。故为满足两大需求,该方案需配备以下功能:
(1)数据采集功能
利用系统提供的各种AP节点对传感器数据进行实时监控和采集,传感器主要针对老年人行为活动、生理状态进行检测。
(2)无线传输功能
WiFi接入的AP节点接收无线传感器的检测数据,AP把数据装入一种特定的数据结构中,并将其通过以太网发送至客户终端进行进一步处理、分析。
(3)现场预警显示
根据相应现实需求,向周围群众等人进行通知,以便于实现现场及时救护工作,从而避免危险发生。
(4)用户终端通知
该功能主要作用是对终端用户进行通知报警,与此同时定位信息一并发送至终端,再由用户终端进行一系列救护请求等处理措施。
2 设计方案
2.1 方案功能
根据上述需求,本方案需要实现以下功能:
(1)信息读取功能
通过WiFi节点传递信息,其中包括节点的ID号、RSSI值及其他一些基本信息。
(2)报警信息采集功能
由行为识别检测装置自动触发,当检测到老人有摔倒情况等发生时,会及时发送至WiFi接入点AP。
(3)信息融合功能
利用WiFi的优点,实现技术多用,通过将其采集到的信息与数据库中的参考值进行对比,确定最佳定位方案。
(4)无线传输功能
将从每一处获取的消防员位置信息和通过烟雾传感器和温度传感器获取的周围环境信息通过无线传输,发送至WiFi接入点AP。
(5)AP端信息采集[5]
由定位终端将接收到的数据信息发送给AP,AP把数据装入一种特定的数据结构中,并将其通过以太网发送至远程终端的定位服务器。
(6)信息数据处理
该部分工作由管理系统自动完成,该系统可以将搜集到的数据信息处理并与标准数据库中的参考值进行对比,将结果反馈给远程终端,其中包括通过WiFi采集到的数据信息。
图1 系统总流程
2.2 设计方案特点
根据对老年人活动及防护现状的调查与分析,设计新系统时应充分利用WiFi和传感器的特点,以确保满足设计的最终目的,在设计中具备以下几个特点:
(1)实时性、准确性
本系统属于远程检测系统,实时性和准确性是最基本的要求,只有确保布置在监控区域的检测装置准确反馈老年人活动行为信息,才能给危险中的老年人提供及时救助,且为救护人员开展工作节省时间耗损。
(2)可靠性、抗干扰性
系统利用WiFi模块工作,提供较强的抗干扰能力以适应老年人所涉及的各种环境情况,保证系统连续可靠的运行[4]。
(3)实用性
远程终端通过无线技术接收到摔倒报警的同时,可以确定老人所处的位置,简单可行。
(4)可扩展性
本系统能够实现多种技术的融合,在应用该系统时,能够将其移至其他场合,并且能够和其他无线技术融合,增强系统的稳定性。
3 行为识别模块
本系统中的行为识别是基于六轴加速度传感器的行为识别方法,实现的通用框架如图2所示,其中主要包含四个部分。数据采集负责操作传感器部件,获取用户行为采样数据,例如加速度、陀螺仪或者生命体征。通常为了满足研究内容需要,部署的传感器个数通常为一个到多个不等,传感器具有通讯能力,与完成数据处理的移动设备组成身体局域网(BANs)或者个人局域网(PANs),相互之间通过WiFi无线网络进行通讯。特征值提取主要负责根据采样数据获得行为的特征值,既包括统计性特征值,如均值、方差、相关性和能量等,还包括结构性特征值,如自回归模型系数等。特征值的选取会直接影响到行为识别结果的精确度,所以是研究的主要内容。
图2 通用框架
3.1 数据预处理
本系统使用六轴加速度传感器提取加速度、角速度信号,构建成库,该数据库包括44位不同采集者的12类动作(包括本文需要的静止、走路、跑步三种动作),本文选取了其中10位不同采集者的上述3种动作的加速度数据作为原始加速度信号。原始加速度信号不仅包含了各种动作对应的加速度信号,还包含了各种噪声,为提高系统的识别效果, 通常在原始加速度信号进行特征提取前需要对其进行预处理, 预处理的方法通常有平滑、去噪、归一化、加窗等。与此同时,为了减少噪声对行为识别的影响,本文采用FIR滤波器对加速度信号进行滤波处理。
3.2 特征提取
通过对近年来人体运动模式识别系统中使用的信号特征的统计分析,本系统中将特征提取方案综合起来归纳为三类:时域分析法、频域分析法和时频分析法。
(1)时域分析法
从时域加速度信号提取特征,也就是直接对加速度信号提取特征,相比于频域分析法和时频分析法具有提取方法简单、计算量小的优点,加速度信号的传统时域特征有均值(mean)、方差或均方差(standard deviation )、能量(Signal power)、两轴之间的相关系数(Correlation between axes)、峰值强度(Peak intensity)。
(2)频域分析法
对加速度传感器信号进行时域到频域的转换后从频域提取相应特征,常用的时域到频域转换方法有快速傅里叶变换(Fast Fourier Transform,FFT)和离散余弦变换(Discrete Cosine Transform,DCT)。比较常见的频域特征有FFT系数、DCT系数、能谱密度(Power Spectral Density, PSD)、频域熵(Frequence-domain Etropy,FDE)。
(3)时频分析法
相对时域分析法和频域分析法而言出现较晚,传统的傅里叶变换只能提取加速度信号的频域特征,丢弃了信号的时域信息,小波变换的出现很好地解决了这一问题。与传统傅里叶变换相比,小波变换是时间和频率的局部变换,解决了许多傅里叶变换不能解决的问题。
3.3 极限学习机(ELM)
不同于传统的神经网络,为增强构建网络的整体性能,极限学习机ELM是在单隐层神经网络(Single hidden Layer Feed-forward Neural networks, SLFNs)基础上提出的一种高效的机器学习方法,如图3所示。单隐含层前馈神经网络(SLFM)具有良好的学习能力,因此应用广泛。ELM中所有的隐层参数均为随机产生,不需要烦琐的迭代过程,该方法随机给定神经元权值中的输入权值和阈值,然后通过正则化原则计算输出权值,神经网络依然能逼近任意连续系统。
图3 极限学习机
ELM 算法可总结如下:
给定训练数据集Ω={(xi,ti)|xi∈Rn,ti∈Rm,i=1,…,N},激活函数g∶R→R和隐节点个数L。
① 随机选取输入权值ai及阈值bi,i=1,2…N。
② 计算隐层输出矩阵H。
③ 计算输出权重β∧=H*T,其中T=(t1,t2,…,tN)T。
由上面所述,我们可以看出:极限学习机只要一次设定隐含层参数L、激励函数、权值w和偏移量b,无须调整。由此可看出,相较于传统的学习方法,ELM具有参数选择容易,学习速度快,具有良好的泛华能力。
4 WiFi定位模块
该模块分为两部分,一部分是后台服务器,利于远程终端及时了解事发老人状况,另一部分可以在现场获取定位信息。
4.1 数据库构建
定位服务器主要由计算机和相应的数据库软件组成,接收由以太网发送过来的数据信息,然后对数据进行相应的处理,主动将处理过的信息发送到消防指挥中心。
待定位区域内有很多固定的参考标签,将此标签的位置信息通过定位服务器送入数据库集中的标准数据库中;然后将WiFi工作时的定位信息经由定位服务器送到数据库集中的定位数据库;最后,将标准数据库与定位数据库中的位置信息进行比对,计算出误差较小的一种定位方式,选取为最终定位方式。
其中定位数据库中的数据每隔一段时间就会将参考标签的位置信息更新一次,相应的分析处理部分就会对定位数据库与标准数据库中的数据进行分析对比,以便能够及时确定最优的定位方式,增强系统的抗干扰性。
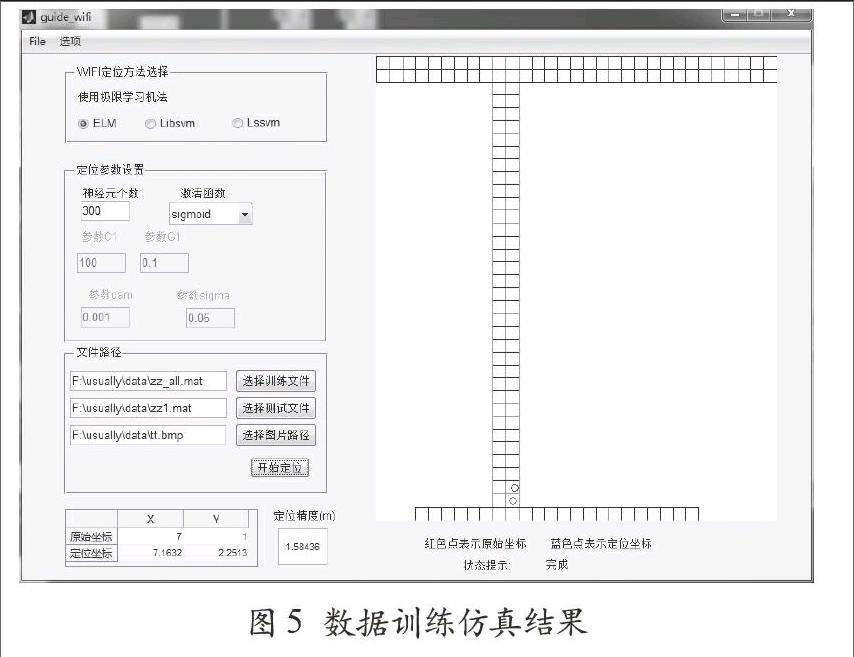
4.2 上位机显示
上位机处理界面如图4所示。
图4 上位机处理界面
其中,图片显示地图范围,为实验仿真时自行绘制的教学楼走廊模拟,一个方格表示两块地砖(2.5 m*2.5 m)。软件可对地图进行自行设定,算法精度明确展示,数据获取与定位功能兼具。
4.3 定位算法概述
该模块采用实时WiFi定位方法,基于移动终端和应用场景中广泛布置且为使用状态的无线路由器,经过数据采集、信号传送、构建数据库、定位服务器等几个过程。其主要特征在于包括采样和定位两个阶段:
(1)数据训练(采样)
由图可以看出,定位算法中主要采用ELM和SVM方法。其中,ELM为前馈神经网络训练方法——极限学习机,在上文中已有重点介绍,经过系统提前进行AP信号采集组成数据库后,通过ELM算法将进行数据训练仿真,结果如图5所示。
采样阶段Sl:在应用场景中分布设置参考点(Xi、Yi、Zi),所述参考点的数量和分布密度与定位精度成正比配置,i为大于1的整数。
采样阶段S2:依次在各个参考点上测量来自不同无线路由器的RSS值,将相应的MAC地址与参考点位置信息记录,直至遍历所有参考点,所采样的信息存储于云端服务器形成备用位置信息数据库。
图5 数据训练仿真结果
(2)位置确定
在本设计方案中,除了利用ELM、SVM算法对采集信号数据进行网络训练,位置的具体确定采用指纹特征提取方式,即基于指纹端点以及分叉点指纹特征点的提取是指纹匹配的关键步骤。
定位阶段S3:移动终端进入应用场景后,在待定位点上接收部分无线路由器的RSS值,访问云端服务器并参照位置信息数据库在云端服务器依据匹配算法计算位置估计值。
经Matlab仿真表明,本方法与传统方法相比,明显提高了指纹初提取的速度,同时在去伪时考虑到了特征点方向场之间的关系,从而提高了指纹特征点提取的准确性。
5 结 语
本系统设计方案利用物联网技术实现对老年人安全出行活动进行远程监控管理和模拟训练,该方案的关键之处在于对老年人的活动信息进行实时采集并将数据进行高效传输,通过WiFi技术进行精确定位并发送至远端,以实现及时救助。本方案旨在为远端老年人家属提供其活动的信息,以保障老年人自身安全、危险状况下的及时救助。基于极限学习机的老人防摔倒检测系统的实现大大提高了高危情况下医护人员的救助效率,极大程度地保障了人员安全。
参考文献
[1]王金云,周晖杰,纪政.复杂背景中的人脸识别技术研究[J].计算机工程,2013,39(8):196-199.
[2]宋克臣.局部二值模式方法研究与展望[J].自动化学报,2013,39(6):730-744.
[3]彭力,刘凯,李超.传感器网络仿真与监控系统的开发[J].计算机仿真,2010,27(1): 170-173.
[4] MATLAB中文论坛.MATLAB神经网络30个案例分析[M].北京:北京航空航天大学出版社,2010.
[5]谢秀颖, 王建, 张桂青.基于北斗系统的建筑设备物联网定位模块研制[J]. 计算机工程与设计,2014,35(10):3428-3434.
[6]王视环.混合无线定位技术应用研究[J]. 信息化研究, 2010,36(3):43-46.
[7]刘敏. 基于Wi-Fi的电子标签定位算法[D]. 上海:上海海事大学, 2012.
猜你喜欢
中华骨与关节外科杂志(2022年9期)2022-12-22
电子制作(2018年19期)2018-11-14
自动化学报(2017年11期)2017-04-04
中国新通信(2016年21期)2017-01-06
现代电子技术(2016年22期)2016-12-26
福利中国(2015年5期)2015-01-03
噪声与振动控制(2015年4期)2015-01-01
中国卫生(2014年10期)2014-11-12
轴承(2010年2期)2010-07-28