一种淤泥质海岸垃圾清理船结构设计
2020-02-11 04:41王稳张建伟罗尔霖史浩辉吴世博张瀚宇
机械工程师 2020年1期
王稳, 张建伟, 罗尔霖, 史浩辉, 吴世博, 张瀚宇
(浙江海洋大学 港航与交通运输工程学院,浙江舟山316022)
关键字:垃圾;泥质海岸;清理船;环保设备
0 引 言
随着海洋垃圾污染的日益加重,海滩垃圾作为最容易接触到的海洋垃圾,它们也对人类的生活产生了直接影响。2017年的中国海洋环境公报显示,中国平均海滩垃圾数量为52 123 km2,平均密度为1420 kg/km2[1]。淤泥质海岸在各种垃圾的作用下,其区域内的水质和土质均遭到严重污染,恶劣的环境影响岸滩生产中农、牧、渔和旅游等产业的发展,同时也危及人们的身体健康。对于淤泥质海岸垃圾的收集,目前常使用人工捡拾的方法,又由于淤泥质海岸兼具水、陆两种地貌特征的部分性质,国内外相关装置研究设计较少且技术不成熟,目前没有大范围推广[2-5]。针对以上问题,本文设计了一种淤泥质海岸垃圾清理船,实现了淤泥质海岸垃圾的收集、传送、清淤、储存和回收,有效提高了淤泥堆积环境下垃圾的清理效率,解决了淤泥质海岸垃圾难清理的问题。

图1 淤泥质海岸垃圾清理船结构示意图
1 淤泥质海岸垃圾清理船
如图1所示,本文设计了一种淤泥质海岸垃圾清理船,船体由船头、船身、船尾构成;船身内部设有工作舱,储存框设在工作舱内,工作舱与船身顶部连通;船体结构设有转轮,驱动清理船在淤泥中移动;船尾顶部双侧各设置两个安装箱,且两箱之间设有收集垃圾的耙钉型传送带一,还设有能够将收集到的垃圾输送至储存框内的输送传送带二;储存框内设有喷头和横杆,实现垃圾和淤泥的分离[6]。垃圾清理船使用单片机作为控制中心,通过红外光电及超声波两种传感器、GPS定位系统和多传感器信息融合技术,实现对垃圾的精确识别和定位;通过重量传感器、自动控制算法,实现装置的自主巡航和储存框内垃圾收集重量达到上限时清理船的自动返航;通过无线数据传输等技术,实现对垃圾收集装置的实时监测,以及装置在垃圾自动收集模式下出现故障时的遥控模式[7]。
2 主要结构设计
2.1 垃圾收集装置及传送装置设计
淤泥质海岸垃圾收集的困难在于部分垃圾会半嵌于淤泥中,因此给垃圾的收集造成困难。本文设计使用一种耙钉型传送带一进行垃圾的收集。清理船在巡航过程中,超声波传感器、红外光电传感器实时检测海岸垃圾,当检测到海岸垃圾时,控制中心启动电动机,使传动带一、垃圾扫板和传送带二顺时针转动,传送带一上的耙钉将淤泥中的垃圾带出,垃圾通过垃圾扫板传递至输送机构传送带二上。其中,当耙钉穿过垃圾扫板上相对应的缺口时,耙钉上的垃圾和淤泥被转移至垃圾扫板上,在重力的作用下,垃圾扫板上的垃圾和淤泥下落至传送带二上,传送带二将垃圾和淤泥输送至储存框内,有效提高垃圾的输送效率;由于耙钉的横截面积较小,使得耙钉上存留的淤泥也较少,可避免淤泥和垃圾混合收集,提高垃圾在储存框内的储存量;耙钉型传送带一的固定轴一上设有支撑拖轮,可减小收集装置与淤泥接触带来的阻力,便于清理船在淤泥上的移动,且传送带一的支撑板内设有与转轴三直径相同的柱形通孔,通孔内设有弹簧,可实现传送带一位置的自适应调节。装置如图2所示。
2.2 垃圾淤泥分离装置及驱动装置设计
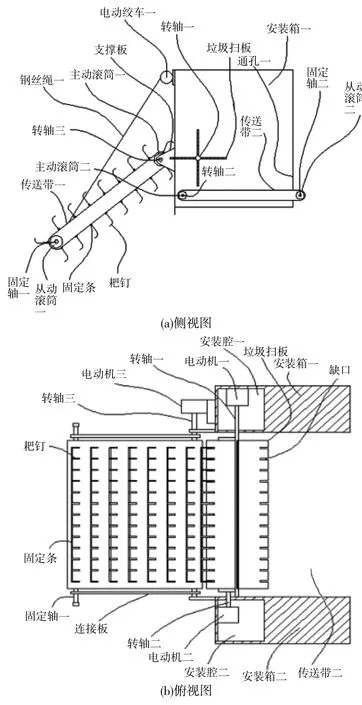
图2 垃圾收集及传送装置
由于耙钉带出的垃圾上附着有淤泥,淤泥和垃圾会被一起收集、输送到储存框内,为增加船体内垃圾的储存容量,设计了一种垃圾淤泥分离装置。垃圾和淤泥被输送到储存框后,控制中心启动电动机及水泵,使用竖杆搅拌储存框内的垃圾,辅以喷头喷水的方式,冲洗垃圾表面的淤泥,使得垃圾和淤泥分离。使用吸泥水泵,将分离出来的泥水从过滤网吸走,再经泥水通道排出船体,以减少储存框内的淤泥,增加垃圾的储存容量,降低船只负载,节省能量消耗。储存框底部设有重量传感器,当储存框内的垃圾达到一定量或清理工作结束后,清理船返航,使储存框向上移动至开口一附近,清理人员站在船体结构的顶部即可回收储存框内的垃圾,操作简单。其中,设备箱内采用锥齿轮传动,以避免因水泡而发生短路事故。装置如图3所示。
清理船使用转轮驱动,当需要清理海岸垃圾时,转轮逆时针转动,使垃圾清理船在淤泥中移动,利用收集装置收集淤泥质海岸上的垃圾;此外,当海水涨潮时,转轮的转动还可以使垃圾清理船在水面上移动,不会被海水淹没或者冲走,安全可靠。

图3 垃圾淤泥分离及驱动装置
2.3 垃圾取出设计
当清理工作结束或船体内部垃圾达到最大限度时,需要对收集到的垃圾进行回收。船体内垃圾的回收主要靠储存框的上下移动实现,为避免储存框在移动过程中与船体内部结构相撞,设计使用压力传感器实现上述目的。当储存框向上移动即将到达顶端时,分别与压力传感器一和压力传感器三相接触,压力传感器一和压力传感器三发送信号给控制中心,控制中心关闭电动机,使储存框停止移动,防止储存框与工作舱的顶部相碰撞;当储存框向下移动至传送带二的下方时,分别与压力传感器二和压力传感器四相接触,压力传感器二和压力传感器四发送信号给控制中心,控制中心关闭电动机,使储存框停止移动,防止储存框与水泵或吸泥水泵等设备相碰撞,确保储存框在限位的范围内安全地上下移动。装置如图4所示。
3 清理船工作流程
当淤泥质海岸垃圾收集船工作时,超声波传感器、红外光电传感器实时检测海岸垃圾,当检测到垃圾时,控制中心控制耙钉型传送带一顺时针转动,耙钉将淤泥中的垃圾挖出,并将垃圾限制在耙钉型传送带一上,传送带一持续转动,垃圾不断挖出并输送至垃圾扫板处。垃圾扫板同时顺时针转动,当耙钉穿过垃圾扫板上相对应的缺口时,耙钉上的垃圾及粘连的淤泥被转移到垃圾扫板上,在重力的作用下,垃圾和淤泥下落至输送传送带二上,输送传送带二顺时针转动将垃圾和淤泥输送至储存框。垃圾停止收集时,耙钉型传送带一、垃圾扫板、输送传送带二均停止转动,其中支撑拖轮可降低行船阻力,支撑板设置的弹簧实现传送带一位置的自适应调节。垃圾及淤泥进入储存框后,竖杆对垃圾进行搅拌,同时喷头喷水,对垃圾进行冲洗,使淤泥和垃圾分离。冲洗垃圾后形成的泥水被吸泥水泵吸至泥水通道排出船体。当船体内垃圾存量到达上限或垃圾清理工作结束后,可控制储存框上移,以便于对垃圾进行回收。清理船使用转轮驱动,可使清理船在淤泥上自由移动;同时,当海水涨潮清理船浮于水面时,转轮也可驱动船体在水面移动。清理船结构如图5所示。
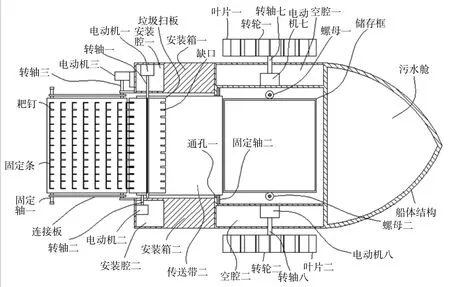
图5 淤泥质海岸垃圾清理船剖视图
4 结 语
对于淤泥质海岸垃圾的收集,目前主要采用人工捡拾的方法,但工作效率低,且耗费大量人力。由于淤泥质海岸兼具水、陆两种地貌特征,在淤泥堆积环境下,使得部分垃圾半嵌于淤泥中,给收集造成困难,各类机器设备在使用时也易陷入淤泥中[8]。本文针对以上问题,以单片机为控制中心,辅以多种传感器,设计使用传送带上的耙钉将淤泥中的垃圾带出,当耙钉通过垃圾扫板缺口时,垃圾被转移至垃圾扫板上,在重力的作用下,垃圾扫板上的垃圾和淤泥下落至输送机构上,输送机构中的传送带将垃圾输送至储存框内,简单高效;垃圾在储存框内被搅拌,并进行水流冲洗,将垃圾上的淤泥冲洗下来,冲洗下来的淤泥通过吸泥水口被吸走,实现垃圾和淤泥分离,同时增加了储存框内的垃圾的存放量,提高了垃圾的清理效率;当储存框内的垃圾达到一定量时,清理人员站在船体结构的顶部,就可以清除储存框内的垃圾,操作简单;转轮式驱动装置,驱动垃圾清理船在淤泥质的海岸上移动,当海水涨潮时,转轮还可以使垃圾清理船在水面上移动,不会被海水淹没或者冲走。该设计可应用于各淤泥海岸和湖泊等区域的垃圾清理,可实现对于环境的保护。
猜你喜欢
文萃报·周五版(2022年24期)2022-06-21
中学生数理化·高一版(2021年1期)2021-03-19
——“模型类”相关试题选登
教学考试(高考物理)(2020年4期)2020-11-16
中学生数理化·高一版(2019年1期)2019-06-26
智能城市(2018年8期)2018-07-06
中学教学参考·理科版(2016年11期)2017-06-08
娃娃乐园·3-7岁综合智能(2016年6期)2016-09-19
小雪花·成长指南(2015年10期)2015-10-23
筑路机械与施工机械化(2014年7期)2014-03-01
筑路机械与施工机械化(2014年3期)2014-03-01