
模糊自适应PID控制在无刷直流电机调速系统中的应用
2020-02-07 13:36顾祖成耿小江王永娟
机械设计与制造工程 2020年1期
顾祖成,耿小江,王永娟,徐 诚
(1.南京理工大学机械工程学院,江苏 南京 210094)(2.四川华庆机械责任有限公司,四川 成都 611930)
由于无刷直流电机的控制相对简单、力矩大、起始响应速度快,常用于各种对可靠性要求较高的场合,因此创建合理的无刷直流电机模型对调速系统是至关重要的。PID(proportion integration differentiation,比例、积分、微分)控制器具有算法简单、可靠性好的特点,常用于被控对象线性、非线性不太严重的系统。模糊自适应PID是通过使比例、积分、微分3个参数能够根据模糊规则自动改变,从而具有一定的自适应性。相比传统PID,其响应性能、鲁棒性以及跟随性都有较大的提升[1-3]。本文在Simulink中创建无刷直流电机的数学仿真模型,分别使用传统PID控制器和模糊自适应PID控制器对其调速系统进行控制,观察能够反映系统性能的动态特性曲线并对仿真结果进行分析与研究,以期找到提高系统动态性能的方法。
1 无刷直流电机建模
1.1 模型假设
本文主要分析无刷直流电机(brushless direct current motor,BLDC)的数学模型特性,根据无刷直流电机运动特性,采用以下假设创建数学模型[4]:1)三相绕组完全对称;2)忽略齿槽、换向过程和电枢反应等的影响;3)电枢绕组在定子内表面均匀连续分布;4)不计涡流和磁滞损耗。
1.2 直流电机控制系统模型
BLDC三相定子电压的平衡方程可用状态方程表示[5]:
(1)
式中:ua,ub,uc为定子电压;ea,eb,ec为定子的反电动势;ia,ib,ic为定子电流;La,Lb,Lc为定子自感;Lab,Lac,Lba,Lbc,Lca,Lcb为定子绕组间的互感;Ra,Rb,Rc为定子绕组的相电阻;t为时间。
BLDC的电磁转矩方程为:
Te=(eaia+ebib+ecic)/ω
(2)
式中:Te为BLDC的电磁转矩;ω为BLDC的角速度。
BLDC的运动方程为:
(3)
式中:B为阻尼系数;J为电机的转动惯量;TL为负载转矩。
2 模糊自适应PID控制设计
传统PID控制有着原理简单、稳定性好、可靠性高的优点,但是由于传统PID控制器的3个参数Kp,Ki和Kd一旦确定便无法改变,使其在复杂控制领域受到很大的限制。模糊自适应PID控制以传统PID算法为基础,通过“量化因子”模块对清晰值进行比例变化以便更好地与相邻模块匹配,根据模糊规则对Kp,Ki和Kd进行修正,其实际输出参数为Kp+ΔKp,Ki+ΔKi和Kd+ΔKd[6]。基于模糊自适应PID控制原理可在Simulink中建立模糊自适应PID控制框图,如图1所示。
模糊推理系统的输入模糊语言变量为E和EC,输出模糊语言变量为ΔKp,ΔKi和ΔKd,模糊词为{NB,NM,NS,ZO,PS,PM,PB},E的论域为{-3,3},EC的论域为{-12,12},ΔKp的论域为{200,1 000},ΔKi的论域为{100,700},ΔKd的论域为{10,100}。具体模糊规则见表1所示。

图1 模糊自适应PID控制框图

表1 ΔKp,ΔKi和ΔKd的模糊规则
3 BLDC调速系统
结合无刷直流电机数学模型特性在Simulink中创建了电流、转速双闭环系统,其主要由速度控制器、无刷直流电机模块、电压逆变器模块、参考电流模块、电流滞留环模块等组成。BLDC控制系统设计原理框图如图2所示。
由电机控制系统设计原理框图,并结合电机数学模型及PID控制设计方法,通过Simulink软件可得到图3所示的模糊自适应PID调速系统。
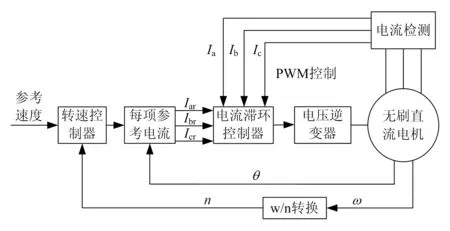
图2 BLDC控制系统设计原理框图
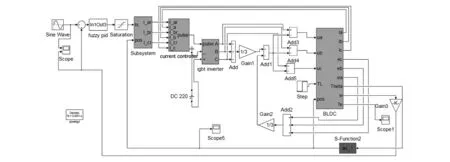
图3 模糊自适应PID调速系统
4 仿真结果分析
给定输入信号为转速1 000 r/min,在0.1 s时突加3 N负载,得到转速响应曲线如图4所示,扭矩响应曲线如图5所示。给定输入信号为频率10 rad/s 、转速1 000 r/min,在0.5 s时突加3 N负载,得到跟随曲线如图6所示。仿真结果表明,模糊自适应PID控制器调速系统的响应速度更快,不存在超调现象,在突加负载的情况下,跟踪性能更强,鲁棒性更好。
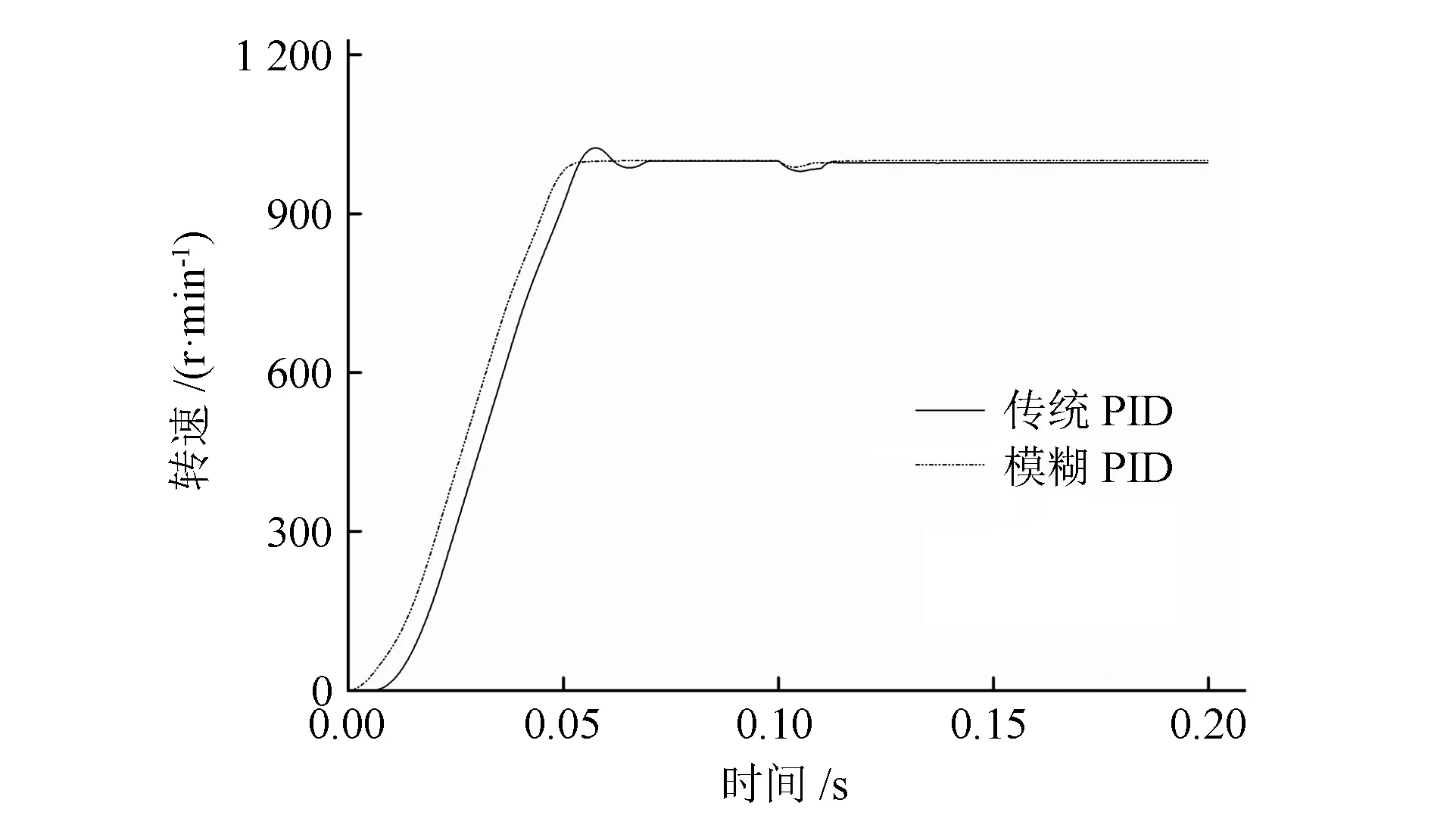
图4 转速响应曲线
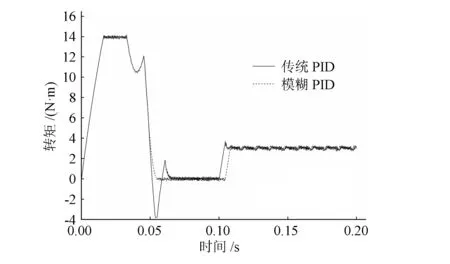
图5 扭矩响应曲线
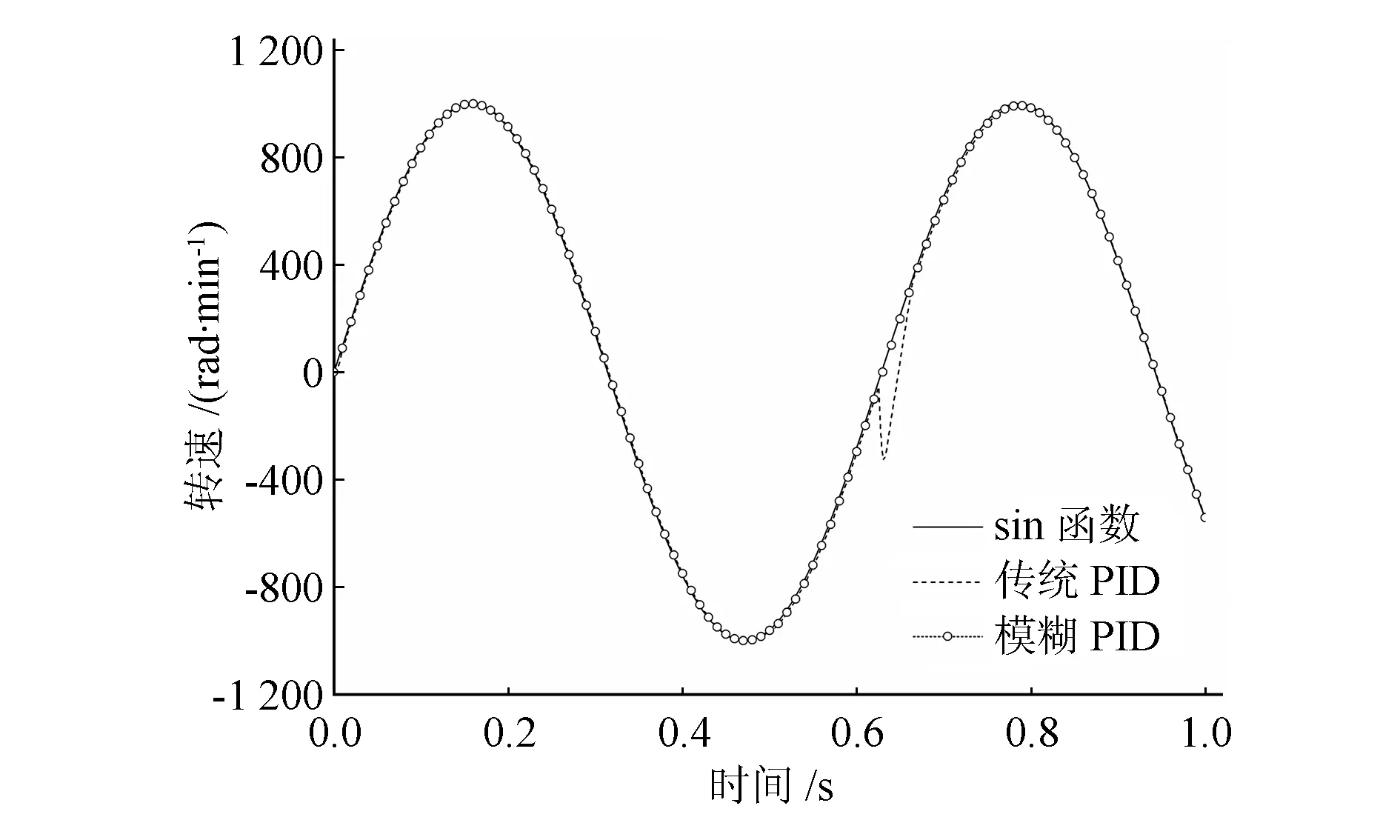
图6 施加负载扰动时的跟随曲线
5 结束语
本文基于模糊自适应PID理论进行了模糊PID控制器的设计,主要从理论方面对模糊PID控制器与传统PID控制器在无刷直流电机调速系统中的应用进行了性能比较。其结果对改善无刷直流电机调速系统性能有一定指导作用。但文章更倾向于理论方面的研究,缺乏试验支撑。因而后续工作将进行相关试验研究,以进一步完善相关理论。
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
哈尔滨工程大学学报(2021年7期)2021-07-13
成都信息工程大学学报(2021年6期)2021-02-12
汽车维修技师(2019年7期)2020-01-16
汽车维修技师(2018年11期)2018-05-11
电子制作(2017年1期)2017-05-17
中学生数理化·高一版(2017年1期)2017-04-25
人民音乐(2016年3期)2016-11-07
电子制作(2016年1期)2016-11-07
