三锚式浮标综合观测平台的研究和应用
2020-02-07 17:56:24刘长华张曙伟万晓正贾思洋赵环宇王春晓范秀涛刘世萱
海洋科学 2020年1期
刘长华, 张曙伟 , 王 旭, 万晓正 , 贾思洋, 赵环宇 , 王春晓, 刘 野 , 齐 勇 , 范秀涛 , 刘世萱
(1. 中国科学院海洋研究所, 山东 青岛 266071; 2. 齐鲁工业大学(山东省科学院)海洋仪器仪表研究所, 山东 青岛 266061; 3. 山东省海洋监测仪器装备技术重点实验室, 山东 青岛 266061)
海洋科学的发展依赖于海洋观测技术的进步, 海洋观测数据获得的多寡和数据类型的丰富是海洋科学研究取得开创性成果的前提和基础, 早期基于船舶的走航式调查为海洋科学的发展起到了巨大的推动作用[1], 而后基于锚系式定点的海洋观测[2-3]、基于卫星的遥感观测[4]和游弋式的水体观测[5]得到迅猛发展, 其所获取的观测数据极大促进了海洋科学研究的进步, 使人类对海洋有了更加全面的理解和认知。
目前, 海洋观测技术的一个重要分支为水体剖面观测技术, 随着海洋学科本身的发展, 对水体剖面数据的获取不仅仅停留在基于船舶的瞬时性剖面数据的获取, 科学家也不满足于数据延时获取的现状, 而且对水体剖面参数也越来越倾向于多而全, 不仅仅是原来容易观测的剖面海流, 还要包括水温、盐度、浊度、溶解氧、叶绿素等水质生态数据, 甚至一直被视为难以长期连续获取的pH值和营养盐等参数, 也成为了目前海洋科学家研究海洋水体所关注的重要参数[6-7]。
然而, 我国大部分的海洋水体剖面观测至今仍然依靠船舶走航式观测和台站定点观测技术周期性的采集海洋表层或有限水层的要素数据, 缺少对海洋次表层以及深层水体进行长期连续的剖面观测, 这主要是实施连续剖面观测的有效技术手段缺乏所致[8-9]。国际上已经试验成功并取得大量水体剖面观测数据的设备和技术手段在我国也存在明显“水土不服”的问题, 极易遭受破坏, 受到各种安全因素的限制, 很难进行长期和广泛应用[7,10], 原因在于我国近海随意捕捞的情况仍然比较普遍, 渔民经常违规作业, 对海洋观测设备的保护意识也比较弱, 导致经常发生各类海洋观测设备遭受渔船撞击或渔网拖曳甚至人为破坏的现象, 严重影响观测数据的连续有效获取[11-12]。
因此设计研发一种适合于我国近海海域, 可进行长期、稳定、连续、定点、实时的水体剖面数据观测, 并且能长期安全运行的观测设备十分迫切, 中国科学院海洋研究所黄东海浮标观测站在多年实际观测经验积累的基础上, 研制完成一种新型的适用于近海水体剖面观测的三锚式浮标综合观测平台, 该平台充分继承了海上大型锚系式浮标的优点, 又创新性地进行了智能化和水体剖面观测设计, 在我国近海具有广泛的适用性。
1 三锚式浮标综合观测平台的设计思路
三锚式浮标综合观测平台的核心目的是实现一定水深范围内的水体剖面长期、连续、定点、实时数据的稳定获取, 并保障观测设施的安全, 因此在设计思路的选择上主要考虑借用目前国内已经广泛使用, 并且得到实践证明较为安全的直径10 m的大型浮标的设计经验, 在这个基础上, 从更加稳定的结构设计, 更加充足的能源供给, 更加高效、稳定的水下观测数据传输方式等方面进行三锚式浮标综合观测平台的系统设计。
如何实现水体剖面观测是一个核心问题, 实践证明, 在锚系上系留自容式传感器进行水体剖面观测具有一定可行性, 但是限制因素较多, 如果不采用水下机器人操作, 仅用潜水员下潜进行系留设备, 剖面水深受限于潜水员下潜深度, 并且人员的危险性极大, 更重要的一点是剖面数据仍停留在自容模式, 不能获取实时的水体剖面数据[12-13]。在已有的10 m直径浮标体上通过原有的设备井自由悬挂可实时进行数据传输的带缆直读式传感器, 经实践证明极易与浮标的锚系发生缠绕, 造成设备损失。因此需要在结构上考虑将浮标体扩大, 在浮标体下面留出足够空间, 采用绞车带动观测设备, 进行上下连续升降式的方式实现水体剖面观测, 经过长期的实验和实际海上实践, 最终证明这是一个较合理的优选方案, 可以实现我国近海海域一定水深范围内的水体剖面长期、连续、实时、稳定的数据获取。
1.1 三锚式浮标综合观测平台的结构设计
三锚式浮标综合观测平台的主浮标体采用直径15 m圆盘型结构, 外围配置3个锚系浮筒与主浮标体链接, 锚系浮筒主要起到固定与系留作用, 也称之为保护浮鼓(图1)。按照功能划分, 三锚式浮标综合观测平台主要由主浮标体、三锚系留系统、常规观测系统、水体剖面观测系统、数据采集存储系统、通信系统、电源系统、安保系统、数据接收处理系统等部分组成。按照结构划分, 三锚式浮标综合观测平台主要由水面主浮标体和三锚系留系统两部分组成, 主浮标体浮于海面之上, 是实现水体剖面观测的主体, 三锚系留系统为海面主浮标的海上固定和定位提供保证。
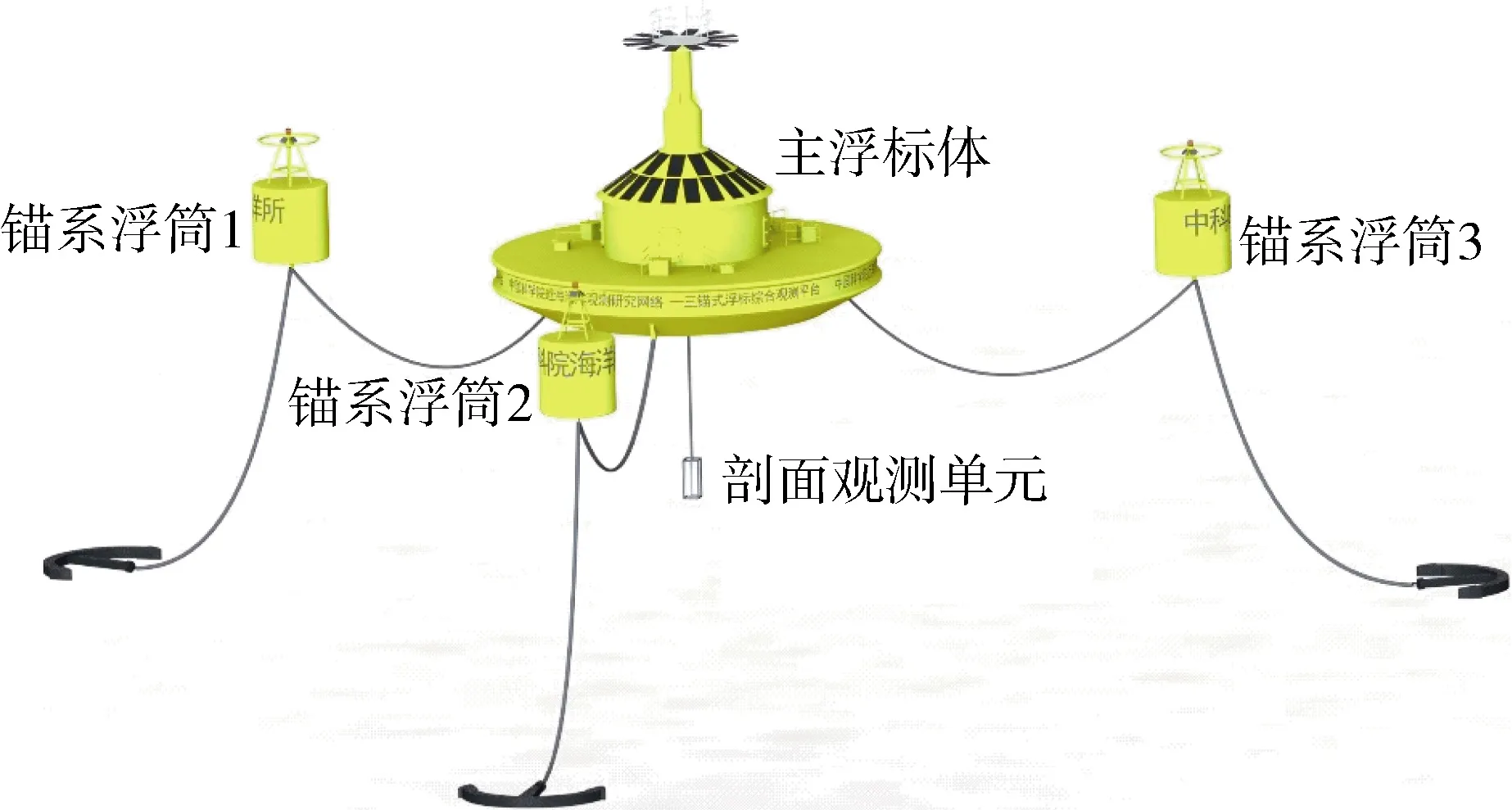
图1 三锚式浮标综合观测平台整体效果 Fig. 1 Design sketch of three-anchor buoy integrated observation platform
1.1.1 主浮标体的结构设计
主浮标体的圆盘形结构, 保证了其各项受力均匀, 且稳性衡准数K设计大于1, 确保主浮标体在极限条件下生存。主浮标体甲板设计周向为4层结构, 从外向内依次为护舷、外围浮力舱、内部仪器舱和电池舱、内部浮力舱, 其中内部浮力舱中间为直径2.5 m的透水区, 为中央观测井, 是实现水体剖面观测结构部分, 中央观测井呈圆筒状, 底部为喇叭型开口, 便于水下剖面观测单元的升降。
主浮标体外侧围绕防护舷材, 以增加标体的抗碰撞能力, 标体内设计有若干全密闭浮力舱, 理论上即使某几个浮力舱破损或进水, 仍有水密舱壁同中间浮力舱阻隔, 浮标仍可安全地浮在水面, 不至于倾覆。在外围浮力舱内主要是进行供电电池、数据采集控制器、通讯设备等仪器设备的布设与安装。根据主浮标体进行常规海表观测的需要, 在标体中间浮力舱内开设3个设备安装井, 可满足浮标水文参数的监测需求。
主浮标体由于为圆盘形, 前后左右对称, 所以水动力学性能主要体现在横摇性和垂荡性两个方面: 主浮标体横摇性能经过计算, 其单位波幅横摇幅(response amplitude operator, 缩写为RAO)较为平缓, 峰值在固有周期3.9 s左右, 峰值突出不大。在实际海况中, 短周期波的波周期(T<5 s)中, 主浮标体摇摆幅度较其他小型浮标明显变小, 长周期波的波周期(T>5 s)中, 浮标摇摆平缓, 幅度适中。主浮标体的垂荡性特点为, 在周期大于6 s的波中, 垂荡幅值可达到波幅的90%以上(图2)。通过计算, 充分说明浮标体随直径增大, 随波性比小型浮标有所减弱, 稳性变强。

图2 主浮标体单位幅值横摇和垂荡响应曲线 Fig. 2 The curves of main buoy body’s response amplitude operator (RAO)
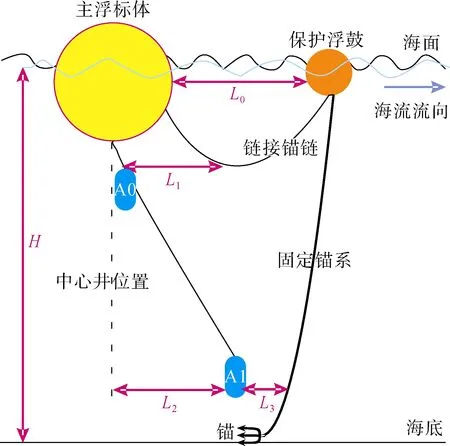
图3 剖面观测设备与链接锚链和固定锚系的相对位置示意图 Fig. 3 The diagram of the relative position between profile observation equipment and link- chain & anchor-chain
1.1.2 三锚系留系统的设计
采用三锚系留系统是解决剖面观测设备在进行上下升降式水体剖面观测时, 有效避免剖面观测设备与浮标锚系缠绕的一个优化方案, 三锚系留法将主浮标与3套锚系分开, 即浮标本身不直接与固定其的3套锚系相连, 3套锚系分别链接于3个保护浮鼓上, 这3只保护浮鼓再用锚链与主浮标体相连, 3套锚系按照夹角120°均布分布于主浮标体周围的海底, 在理想状态下, 漂浮于海面的保护浮鼓也以夹角120°的状态, 等距离均布分布于主浮标体周围海面(图1)。但是随着风、浪、流等海洋复杂因素的影响, 实际的状况为3个保护浮鼓与主浮标体之间的距离是随时变化的, 保护浮鼓与主浮标体之间的链接锚链随风、浪、流条件的变化而张紧或松弛、悬垂(图3)。因此, 在设计时须考虑两个位置处会发生剖面观测设备被缠绕的情况, 即剖面观测设备升降至与保护浮鼓链接锚链可能发生缠绕的位置(图中A0位置)和剖面观测设备升降至下层水深与保护浮鼓锚系可能缠绕的位置(图中A1位置), 理论上计算采取极端条件下, 只要控制了主浮标体与保护浮鼓之间的距离, 即L0的长度, 就可以确定A0位置时L1的距离, 同时也可以确定A1位置时L3的距离。所以L0的距离是防止剖面观测设备上下升降时与链接锚链和保护浮鼓锚系缠绕的关键, 采用悬链线理论计算浮体静平衡位置以及锚系几何形状, 设置初始条件设定剖面观测设备升降的路径形状, 综合考虑流速剖面、设备和系泊线参数, 通过静力学分析, 可确定L0、L1。结合常规观测参数获取的东海实验观测海域环境条件, 设置的极限海况的计算条件为: 风速: 10 m/s, 流速: 1.5 m/s, 浪高: 最大波高2.5 m, 采用Jonswap波浪谱, 有效波高2 m, 谱峰周期4 s。考虑观测水深的条件, 给出两种主浮标体与保护浮鼓的链接情况, 情况1为1节锚链链接, 长度27.5 m, 水深范围为10~30 m; 情况2为2节锚链链接, 长度为55 m, 水深范围为40~60 m(表1), 更深的水深情况可参照此方法进行计算和设定。通过理论计算, 可以看出此种设计方案在设定安全的极限阈值海况下, 剖面观测设备进行上下升降式观测时, 不存在与链接锚链和固定锚系缠绕的情况, 可以进行稳定的实时水体剖面数据获取。

表1 两种情况下理论计算L0、L1和L2(水深10~60 m) Tab. 1 The theoretical values of L0、L1 and L2 in both cases (water depth 10~60 m)
1.2 三锚式浮标综合观测平台能源供给的设计
三锚式浮标综合观测平台因其功能多, 集成了目前锚系式浮标观测的先进理念, 因此其所需要的能源较大, 所以需要充分考虑能源的供给方式, 在设计之初曾考虑采用风能-波浪能-太阳能三者互补的发电技术, 与蓄电池组合供电, 对三锚式浮标综合观测平台提供能源。后期在实际的研发中, 考虑安全和高效性等因素, 最终采用了太阳能电池和蓄电池组合供电方式, 对整套系统提供工作能源。
三锚式浮标综合观测平台的主要电源系统分为两部分: 浮标常规供电系统和剖面观测供电系统。浮标常规供电部分与传统大型浮标供电系统类似, 通过蓄电池为各系统提供能源, 蓄电池的电量由太阳能板进行及时补充充电, 太阳能电池板选用单晶硅材料, 充电控制器充电效率在90%以上, 由于预布放海域为多雨的地区, 在春夏之交会有长时间的阴雨天气, 会造成太阳能充电不及时, 最终导致蓄电池放电过多, 造成观测设备停止运行, 因此在设计蓄电池容量时, 需考虑足够的冗余。绞车系统是实现水体剖面观测核心系统, 因此其供电的稳定和有效成为关键的一环。绞车供电系统采用更大容量蓄电池, 且由于绞车功率的需要, 将直流电经逆变器转换为220 V交流电给绞车电机供电。
1.3 三锚式浮标综合观测平台通讯的设计
三锚式浮标综合观测平台数据通讯主要包括两部分, 传统的浮标上获取观测数据传输采用CDMA/ GPRS或者北斗通讯方式, 另一部分通讯是水体剖面观测数据与浮标上数据采集器的通讯, 实时或者近实时地将剖面观测设备获取的数据传输到浮标主体的数据采集器上, 再由浮标数据采集器将数据打包, 通过无线网络方式传输到陆地实验室。三锚式浮标观测平台的水体剖面观测数据通讯方式采用了短波通讯, 即水下剖面观测设备完成剖面观测后, 上升到水面, 将短波通讯天线露出水面, 与浮标平台上的短波接收装置进行信号握手后, 进行剖面数据的传输, 实现水体剖面观测数据的获取。
2 三锚式浮标综合观测平台水体剖面观测的实现方式
三锚式浮标综合观测平台实现水体剖面观测的主要技术方案是采用绞车驱动, 绞车带动钢缆在水体中进行上下升降, 钢缆末端配置有多参数传感器, 随着钢缆的上下升降, 传感器实时获取水体的剖面数据。因此, 水体剖面观测组成包含有绞车、绞车控制器、剖面观测单元、短波通讯模块等核心部件, 绞车控制器控制绞车带动剖面观测单元按照既定时序对海水剖面进行实时观测, 当剖面观测单元完成一个往复剖面观测后, 上升到达主浮标体甲板附近时, 通过短波通讯模块将水下剖面数据传输至交换机, 并实时通过主无线路由器发送至岸基系统(图4)。进行水体剖面观测的水下观测单元获取的参数包括水温、盐度、叶绿素、浊度、溶解氧、pH值、深度。

图4 剖面观测系统组成图 Fig. 4 The module diagram of profile observation system
绞车系统的运转情况视海况而定, 具有智能判断和控制功能, 这部分是三锚式浮标综合观测平台的一个特殊设计, 最主要目的是保护剖面观测设备在安全的前提下, 长期、稳定、实时地获取水体剖面数据。当海况十分良好时, 绞车以设计的最慢速度进行上下升降, 进行高密度的水体剖面数据采集, 当海况一般时, 绞车以设计的中等速度进行上下升降, 进行中等密度的水体剖面数据采集, 当海况较差时, 绞车以设计的最快速度进行上下升降, 进行低密度的水体剖面数据采集, 当遇到极端恶劣海况时, 绞车则停止工作, 不再进行水体剖面的观测。海况好坏的判断数据是来自主浮标体常规观测数据, 绞车控制器与主浮标体的数据采集器之间可进行交互通信, 常规观测的风、浪、流、浮标姿态等主要数据会及时发送到绞车控制器, 绞车控制器根据预先设定的阈值判断绞车将采取何种运动方式, 包括慢速运动、中等速度运动、快速运动或不运动, 并据此自动确定水体剖面观测的上下升降周期。智能控制中所需的风、波浪、海流及浮标姿态的阈值须在具体观测海域的长期实验过程中不断修正和调整, 尽可能保障剖面观测的可靠性和安全性(图5)。

图5 绞车智能判断方案 Fig. 5 The intelligent judgment scheme of winch
3 三锚式浮标综合观测平台的实际应用
3.1 研制过程
三锚式浮标综合观测平台实际研制周期近5年时间, 从2013年开始构思, 研讨相关方案, 2017年立项, 至2018年4月17完成主浮标体建造, 2018年7月21日全部完成调试和岸边拷机, 并布放至实验海域, 开始为期一年时间的实验观测[14]。
三锚式浮标综合观测平台在进行海上实验观测的过程中, 设置了完善的安全保护系统, 以确保整体系统的安全、稳定运行, 包括人员闯入报警和事故报警等。主浮标体上安装AIS系统和独立北斗定位系统, 可对浮标站位进行有效监控, 防止跑标, 有效保障浮标安全。另外, 整套系统还配置了视频监控系统, 即可进行浮标运行状态和周围海况的视频查看、研究, 也可进行浮标系统的安全保障。
三锚式浮标综合观测平台的数据接收系统包括常规数据接收处理系统和剖面数据接收处理系统, 两者均对接收的数据进行实时校验, 只有校验正确的数据才被处理, 保证数据准确可靠, 数据接收系统具有良好的安全性、容错性、成熟性, 采用标准化的数据质量检验流程和先进的数据库存储系统, 可实现对接收数据的查询和曲线分析功能, 并且软件设计和采用的数据库都具有很强的可扩展性, 以保证后续功能的扩展开发。
三锚式浮标综合观测平台在海上实验海区运行的一年时间内, 经历了多个恶劣天气, 其中包括2018年的第10 号台风“安比”[15], 2019年的第5号台风“丹娜丝”和第9号台风“利奇马”等, 在台风经过期间, 水体剖面观测设备根据主浮标体上常规观测设备实时测得的风、浪、流、浮标姿态等数据进行了智能判断, 保证了水体剖面观测设备在不同海况下的安全稳定运行状态, 同时也充分证明了三锚式浮标综合观测平台运行的可靠性和稳定性。
3.2 三锚式浮标综合观测平台实验数据的获取情况
三锚式浮标综合观测平台获取数据主要包括两部分, 一部分传统意义上的海表观测数据, 这类数据一般10 m的大型综合观测浮标和小型的综合观测浮标均可以获取到, 另一部分为仅仅依靠三锚式浮标综合观测平台才能获取到的连续水体剖面观测数据。三锚式浮标综合观测平台自2018年8月15日12: 00开始进行水体剖面观测, 至2019年10月28日12: 00截止, 按照设定程序, 水体剖面观测设备获取的剖面参数共9项, 包括水深、浊度、叶绿素、溶解氧、pH值、水温、电导率(盐度)、采集时间、接收时间, 理论计算应采集数据55 968条, 但是由于进行水体剖面观测的绞车系统具有智能判断功能, 不利的海况下绞车停止工作, 对剖面观测系统起到了很好的保护作用, 因此, 实际获取有效观测数据量为41 048条, 对这些有效观测数据同时进行了多次的现场数据比测, 证明获取到的观测数据质量良好。
智能判断阈值的设定是保证水体剖面观测安全稳定运行的一个关键, 经过不断修正和优化, 在观测试验海域, 最终确定的阈值条件如图6所示, 实际的运行中智能判断涵盖以下4种条件, 条件1: 四级风速为14.4 m/s, 四级波高为1.6 m, 四级流速为1.6 m/s, 当风、浪、流有任意一项参数大于等于四级时, 绞车停止工作; 条件2: 三级风速为12.6 m/s, 三级波高为1.4 m, 三级流速为1.4 m/s, 当风、浪、流所有参数小于四级, 且有一项参数大于三级时, 绞车排缆收放速度为5 m/min, 使得绞车运行速度加快, 尽快观测完毕收回至甲板位置; 条件3: 二级风速为10.8 m/s, 二级波高为1.2 m, 二级流速为1.2 m/s, 当风、浪、流所有参数小于三级, 且有一项参数大于二级时, 绞车排缆收放速度为4 m/min; 条件4: 一级风速为9 m/s, 一级波高为 1 m, 一级流速为1 m/s, 当风、浪、流所有参数小于二级时, 绞车排缆收放速度为3 m/min。智能绞车进行海况判断所依据的常规数据主要选取绞车运动点次的前三个点次获取的风、浪、流数据。
在一年时间的试运行中, 智能绞车判断功能的有效性得到了充分证明, 表2所选取的即是具体智能判断的实例, 所以绞车停止运行。同时也可以看出, 智能判断功能中通过阈值判断从而停止水体剖面观测进行的时间主要集中在台风期间和农历大潮汛期间, 这对于剖面观测系统的安全性起到了很好的保护作用。
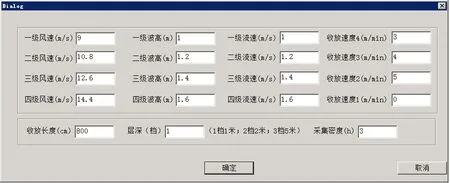
图6 三锚平台设定的智能控制阈值 Fig. 6 The setting Intelligent control threshold of three-anchor buoy integrated observation platform
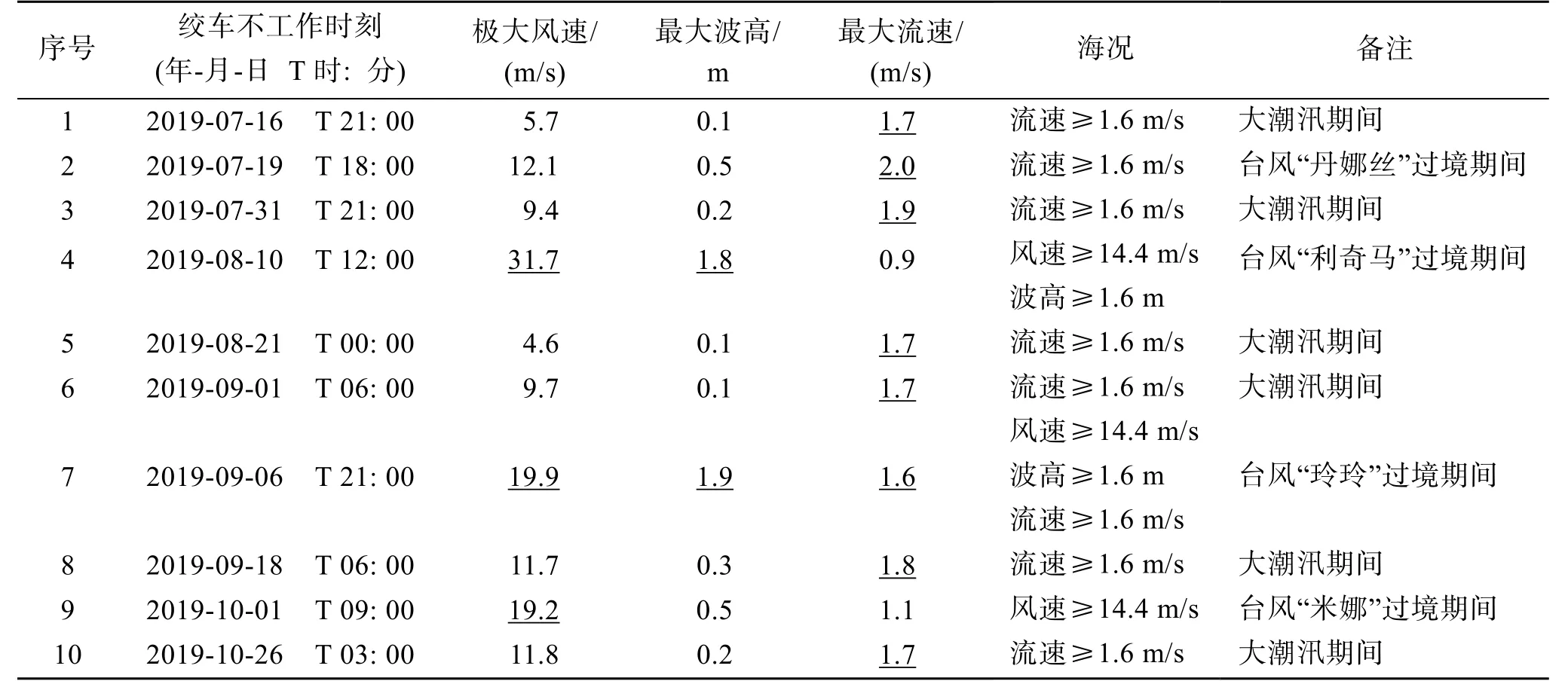
表2 通过智能判断阈值停止绞车工作的部分案例 Tab. 2 Some cases of the winch immobility by intelligence judgement threshold
当然, 以上的智能判断阈值仅仅适用于观测试验海域, 不具有通用性。三锚式浮标综合观测平台布放于哪一个海域, 通过历史资料或者现场获取的一段时间长度的常规观测数据, 结合浮标姿态不断优化、调整, 最终才可以确定目标观测海域的智能判断阈值, 不是所有海域均使用一套判断阈值, 这在其控制数据采集器中也融合了AI(Artificial Intelligence, 人工智能)技术中的机器学习功能。
4 小结
三锚式浮标综合观测平台在海洋观测技术领域是一个崭新的应用, 同时也是一项系统性的创新研究, 观测内容和方式上具有海气界面观测、通量观测、水面观测、水体观测、海底观测等多项综合观测以及应急生态灾害专项监测诸多功能于一体的特点。
概括而言, 三锚式浮标综合观测平台与现有的直径10 m的大型海洋综合观测浮标系统相比, 还具有以下显著特点:
1) 采用锚系+保护浮鼓组合成三锚系留系统, 增强了抗恶劣环境的能力, 极大提高了浮标的锚泊安全可靠性。
2) 三锚系统呈120°均布, 通过保护浮鼓的浮力拉紧主浮标体, 极大的限制了主浮标体的旋转自由度, 使主浮标体具有极高稳定性。
3) 主浮标体稳定性和可靠性高, 减少了浮标的旋转和摇摆角度, 从而提高了观测系统的数据准确度, 同时通讯设备的姿态保持良好, 也大大提高了数据的传输准确率。
目前三锚式浮标综合观测平台虽然在近海有限的水深下取得了试验成功, 但是仍然存在许多问题亟待解决, 有些问题甚至是与其显著特点相伴生的, 诸如需要充足的安全可靠的能源供给、在更大水深下剖面观测的安全性、新技术视频和远程监控的稳定性等, 还有由于标体增大和三锚系留结构导致整体系统随波性差, 对波浪的测量能力弱等自身问题, 尤其是三锚式浮标综合观测平台海上布放和回收的施工难度极大等, 这些方面都需要进一步的技术研发, 逐渐予以解决。水体剖面观测数据的近实时情况也是一项亟待解决的问题, 目前已经着手进行具有通信、供电和高强度、高耐磨性的新型水下铠装电缆的研究和设计, 随着技术和加工工艺的逐渐成熟, 今后有望采用新型水下铠装电缆取代短波通信结合普通钢缆的水体剖面实现方案, 从而实现三锚式浮标综合观测平台对近海水体剖面观测数据真正的实时、长期、稳定、连续的安全获取。
即使三锚式浮标综合观测平台尚有许多亟待解决的技术难题, 但实践证明, 目前该技术方式对于近海水体剖面数据的获取十分有效, 且该平台预留多种观测井、仪器舱, 如果出现突发生态灾害或根据实际应用和科学需求, 短期驻留海上试验人员, 可以进行综合的海上观测试验, 是简易、实用的海上试验综合观测平台, 可大大丰富近海水体数据的获取方式及相应的数据量, 对于精细化的研究近海问题, 诸如沿岸流特征、低氧、酸化、赤潮、绿藻等生态问题[16-20], 提供更加有力的科学数据支撑。
猜你喜欢
家教世界·创新阅读(2023年3期)2023-06-09 00:19:23
家教世界·创新阅读(2023年2期)2023-06-07 23:53:42
家教世界(2023年7期)2023-03-22 12:11:24
家教世界(2023年4期)2023-03-04 07:31:28
上海公路(2018年3期)2018-03-21 05:55:44
同煤科技(2015年4期)2015-08-21 12:51:04
燕山大学学报(2014年1期)2014-03-11 15:28:14
河南科技(2014年24期)2014-02-27 14:19:41
河南科技(2014年23期)2014-02-27 14:19:12
河南科技(2014年12期)2014-02-27 14:10:35