伴随发动机起动的混合动力汽车切换协调控制
2020-02-06 10:55朱龙龙付主木陶发展司鹏举
河南科技大学学报(自然科学版) 2020年3期
朱龙龙,付主木,b,陶发展,b,司鹏举,b
(河南科技大学 a.信息工程学院;b.河南省机器人与智能系统重点实验室,河南 洛阳 471023)
0 引言
并联混合动力汽车(parallel hybrid electric vehicle,PHEV)存在着纯电动、发动机驱动、混合驱动和制动等多种运行模式[1-2],行驶时存在着模式切换。模式切换时,由于发动机和电机转矩动态响应时间相差较大,易引起系统转矩波动,产生较大的冲击,影响整车驾驶舒适性[3-5]。
针对PHEV切换动态协调控制问题,学者提出了多种协调控制策略。文献[6-7]分别设计了基于比例积分微分(proportional-integral-derivative,PID)控制和模糊控制的转矩补偿切换动态协调控制策略,以需求车速与实际车速的差值为输入组成了闭环控制系统,来控制电机为发动机提供转矩补偿,降低了切换过程中的转矩波动,但PID和模糊控制器参数的选取具有很大的主观性,无法实现切换协调策略的最优化。为了实现切换过程中的最优控制,文献[8-9]设计了基于干扰补偿的切换动态协调控制策略,通过分布估计算法来获取参数最优的观测器模型,实现了对发动机转矩波动的精确估计,但算法设计较为复杂,限制了其在实车控制中的应用。为了提高控制策略的实时性,文献[10-11]将PHEV传动模型中的非线性部分线性化,采用一种快速的线性模型预测控制器来获取每个时间步长的电机和发动机转矩信号,改善了混合动力汽车协调控制系统的跟踪性能,从而提高了传输系统切换过程中的平稳性。文献[12-15]基于模型预测控制理论建立了冲击度的预测模型,结合反馈控制和预测模型,实现了适用于复杂驾驶工况的切换协调控制策略,有效地减少了系统冲击,提高了驾驶舒适性。以上方法多针对切换过程的各个阶段设计同种协调控制策略,未充分考虑各阶段PHEV动力总成的运行状态,可能在各阶段不能充分发挥策略优势,还可能存在分析复杂和计算量大等不足。
基于此,本文针对一种单轴联结式PHEV,考虑到发动机和电机响应特性的不同,重点对伴随发动机起动的模式切换过程(由纯电动模式切换到有发动机工作的模式)进行了动力学分析。依据发动机、电机和离合器状态将切换过程分成3个阶段,分别设计了基于开关(bang-bang)控制的发动机起动、基于模型预测控制的转速同步和基于电机补偿发动机转矩突变的动态协调控制策略,来协调切换过程中3个阶段的发动机和电机运行。并基于MATLAB/Simulink软件环境和试验平台,对所设计的策略进行了仿真和试验分析。
1 单轴联结式PHEV模式切换过程分析
1.1 系统结构
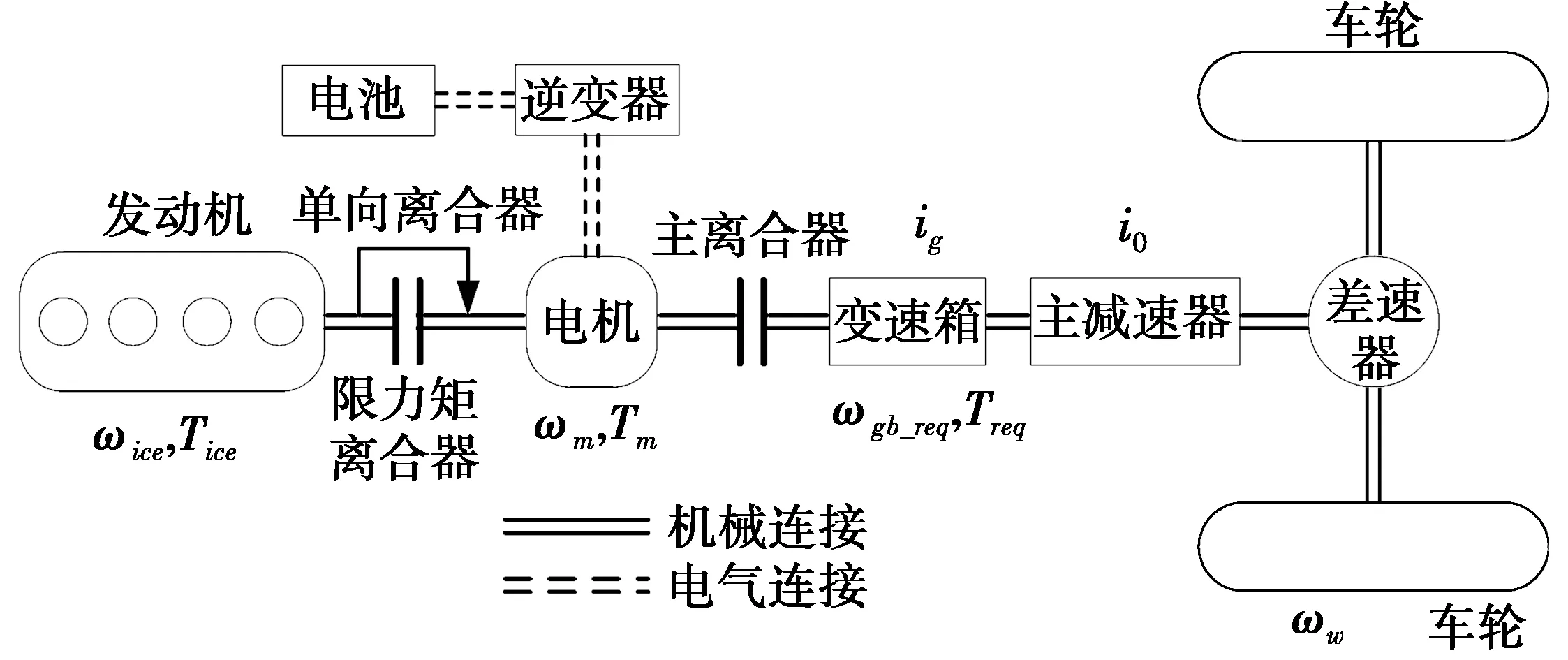
图1 单轴联结式PHEV系统结构
本文的研究对象为单轴联结式PHEV系统,其结构如图1所示。有单向离合器、限力矩离合器和主离合器3个离合器,通过3个离合器的结合和分离能够实现混合动力汽车的多种运行模式。如当限力矩离合器分离时,通过控制逆变器实现纯电动驱动;当单向离合器结合时,可通过发动机和电机的转矩叠加实现混合驱动。该结构简单紧凑,实现了发动机和电机转矩输出的一体化。
1.2 驱动模式间切换过程分类
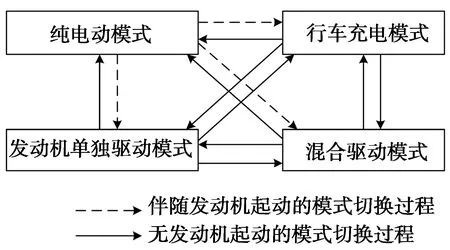
图2 PHEV各驱动模式间切换关系
根据发动机、电机、离合器状态的不同,PHEV驱动模式间切换过程可分为伴随发动机起动的模式切换过程和无发动机起动的模式切换过程,各驱动模式间切换关系如图2所示。针对伴随发动机起动的模式切换过程(由纯电动模式切换到其他3种驱动模式),需要先结合限力矩离合器,利用电机来起动发动机,待发动机起动后,还需分离限力矩离合器和结合单向离合器来避免电机转速对发动机的影响。此类切换过程可根据离合器、发动机和电机的状态分为3个阶段:发动机起动阶段,发动机转速由0 km/h升至怠速;转速同步阶段,发动机转速由怠速升至与电机转速同步;转矩突变阶段,发动机和电机分别转变为目标转矩。相较于无发动机起动的模式切换过程,伴随发动机起动的模式切换过程离合器动作更为复杂,如果缺乏合理有效的控制,不仅会产生转矩波动,甚至会造成转矩中断,极大地影响驾驶舒适性。而且,无发动机起动的模式切换过程主要是对发动机和电机转矩突变的控制,是伴随发动机起动的模式切换过程研究中的一部分,在本文中不做单独研究。所以,本文接下来主要针对伴随发动机起动的模式切换过程,进行分段协调控制策略设计。
2 伴随发动机起动的动态协调控制策略设计
2.1 bang-bang控制的发动机起动动态协调控制策略
发动机起动阶段最主要的目标是尽量在最短时间内完成发动机的起动,bang-bang控制是一种最小时间控制方法,能够实现控制系统的最小时间响应。在此阶段,bang-bang最优控制算法设计了切换协调控制策略。该阶段整车系统动力学模型[16]为:
(1)
其中:Tc为离合器转矩;Tsr为发动机起动阻力矩;ωice和Jice分别为发动机的转速和转动惯量;Tm、ωm和Jm分别为电机的转矩、转速和转动惯量。另外,
(2)
其中:ig和i0分别为变速箱和主减速器的传动比;mgsinα、frmgcosα和0.5ρCDA(Rωv)2分别为整车的爬坡阻力、滚动阻力和空气阻力;R、ωv和Jv分别为车轮的轮胎半径、转速和转动惯量。另外,通过ωv可以计算出ωm,
ωm=igi0ωv。
(3)

(4)
为了求解使J达到最小值的u*(t),基于bang-bang最优控制算法,设计哈密顿函数如下:
H=1+λbu,
(5)
其中:λ为哈密顿函数的伴随量。可得u*(t)为:
(6)
由伴随方程得:
(7)
根据式(7)可知:λ是一个定值常数,考虑到实际控制对象,u*(t)为一正值,所以u*(t)的取值只能是Tc_max-Tsr。至此,在发动机起动阶段的最优离合器转矩求解完成。
仅仅考虑最小时间内完成发动机的起动是远远不够的,由于限力矩离合器的结合,不可避免地造成总输出转矩的下降,因此,需要通过控制逆变器来控制电机进行输出转矩的补偿。此时电机的总需求转矩为:
(8)
2.2 基于模型预测控制的转速同步动态协调控制策略
发动机由怠速到与电机同步阶段,模型预测控制能在给定时域内预测发动机转矩的变化,通过协调发动机和电机转矩的变化,实现车速平稳过渡。在此阶段的动力学方程变为:
(9)
其中:Tice为发动机输出转矩。不考虑空气阻力,则Treq为:
(10)

由式(9)和式(10)得系统状态方程为:
(11)
把系统状态方程离散化得到:
xd(k+1)=Adxd(k)+Bdu(k)+Bξξ,
(12)

设△xd(k)=xd(k)-xd(k-1),△u(k)=u(k)-u(k-1),经计算可得:
△xd(k+1)=Ad△xd(k)+Bd△u(k)。
(13)
令x(k)=[△xd(k)T,xd(k)T]T,可得:

(14)
其中:
为减小在线计算量,以适用于实时控制,定义优化时域为3,控制时域为1,则系统在k时刻的预测输出y(k+i|k),i=1,2,3为:
Y=[y(k+1|k)Ty(k+2|k)Ty(k+3|k)T]T=
[ωice(k+1|k),ωm(k+1|k),ωice(k+2|k),ωm(k+2|k),ωice(k+3|k),ωm(k+3|k)]T;
△U=△u(k)=[△Tice(k),△Tm(k),△Tc(k)]T。
则可以得到输出预测模型:
Y=Fx(k)+φ△U,
(15)
为了减小转速同步阶段的转矩波动,定义目标函数如下:
rω1(△Tm(k))2+rω2(△Tc(k))2+rω3(△Te(k))2,
(16)

求得使该阶段目标函数值的最小解为:
(17)

故在k时刻的最优控制量为:
u(k)*=[Tice(k)*Tm(k)*Tc(k)*]T=u(k-1)+△U。
(18)
由式(18)确定了发动机、电机和离合器的需求转矩。
2.3 基于电机补偿发动机转矩突变的动态协调控制策略
发动机和电机转速达到同步后,限力矩离合器分离,单向离合器锁死,进入转矩突变环节。此环节中为时刻确保满足整车动力性要求,需满足如下关系:
(19)
其中:Treq与发动机起动阶段一致。
为了降低此阶段输出转矩的波动,采用基于电机补偿发动机的协调控制策略。发动机转矩经限制后为:
(20)

其中:T为控制时间。
通过控制逆变器增加电机转矩对发动机转矩进行补偿,此时电机需求转矩被重新计算为:
(21)
3 仿真与试验
3.1 仿真结果
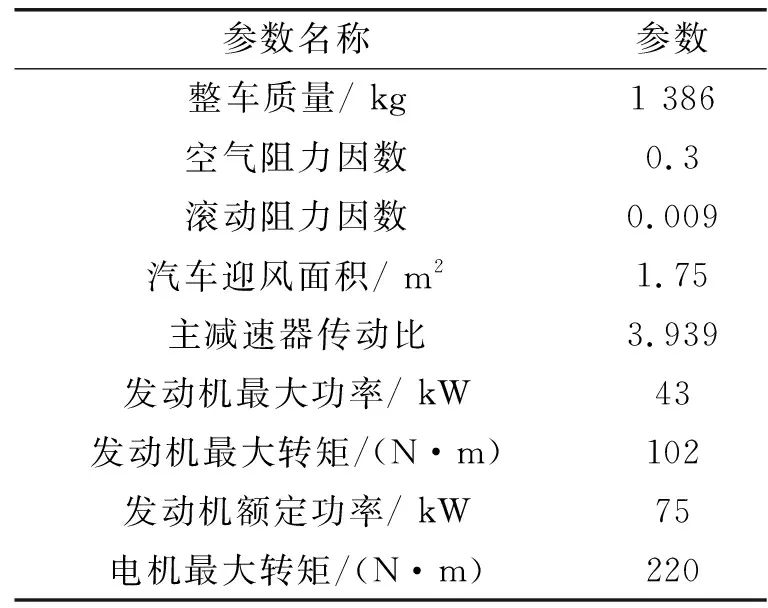
表1 仿真模型中的整车参数
图3为仿真循环工况和驱动模式变化情况。用于本次仿真的循环工况如图3a所示,汽车经过两次均匀加速从0 km/h加速至100 km/h,该循环工况可使PHEV经历纯电动驱动模式、混合模式等多种驱动模式,便于对驱动模式之间切换过程的研究与分析。基于该循环工况,PHEV驱动模式的变化情况如图3b所示(纯电动模式、发动机单独驱动、行车充电和混合驱动模式分别用1、2、3、4来表示)。采用切换动态协调控制策略前后,发动机转矩Tice和电机转矩Tm的变化、传动系统需求转矩和实际输出转矩的差值变化,以及驱动模式切换过程中整车冲击度变化的仿真结果,分别如图4~图6所示。


由图3b可以看出:在整个循环工况中,PHEV切换过程包含了由纯电动切换到发动机单独驱动模式、纯电动切换到混合驱动模式这类伴随有发动机起动的切换过程。通过对比分析切换协调控制策略作用前后的发动机和电机转矩变化,可以很直观地验证所设计控制策略的正确性和有效性。由图4a可知:当从纯电动模式切换到其他模式时,采用切换协调控制策略前,发动机转矩波动明显。结合图4b可以看出:采用动态协调控制策略后,发动机转矩变化明显更为平滑,消除了发动机转矩的尖峰波动,而且电机转矩的突变得到了很好的抑制,在切换过程中发挥着补偿发动机转矩的作用。图5为传动系统需求转矩与实际输出转矩的差值变化仿真结果。由图5a可知:切换过程在采用协调控制策略前,系统需求转矩与实际输出转矩的差值达到了45.0 N·m以上。结合图5b可以看出:采用协调控制策略后,系统需求转矩与实际输出转矩的差值被限制在5.5 N·m以内,相较于协调控制策略作用前大约降低了90%,使得系统输出转矩能够很好地满足需求转矩的变化。图6为整车冲击度j变化仿真结果。由图6a可知:采用动态协调控制策略前,在纯电动模式切换到发动机单独驱动模式过程中,整车冲击度达到了15 m/s3,严重影响了驾驶员和乘客的乘车舒适性。结合图6b可知:采用协调控制策略后,整车冲击度降低至3 m/s3,冲击度得到了极大的限制,进而实现了纯电动模式向其他模式的平滑切换,并提高了驾驶舒适性。
3.2 试验验证
为了进一步验证所设计控制策略的实时性能,对本文所设计的控制策略进行了台架试验。台架试验所用平台主要由工控机、发动机、锂电池、电机、限力矩离合器、测功机、扭矩传感器等构成,试验平台主要参数见表2。工作原理为:试验时忽略空气阻力和路面坡度的影响,使用测功机模拟路面阻力,以驾驶员的操作(控制油门、刹车踏板和离合器)为输入进行车速控制和模式切换,并采用控制器局域网络通信实现对离合器、电机、发动机与工控机之间的状态等信号传输及命令接收;此外,在工控机上基于LabVIEW环境设计了切换协调控制程序,实现了对切换过程中发动机和电机转矩输出控制,以验证对输出转矩波动的抑制。试验过程中10 s内车速的变化情况如图7所示,由此得到了采用切换协调控制策略前后,电机和发动机转矩变化试验结果,如图8所示,整车冲击度变化试验结果如图9所示。
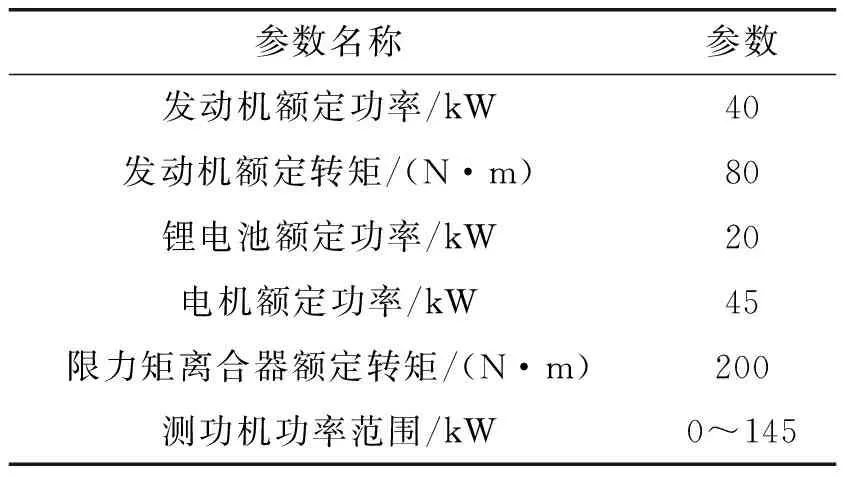
表2 试验平台主要参数
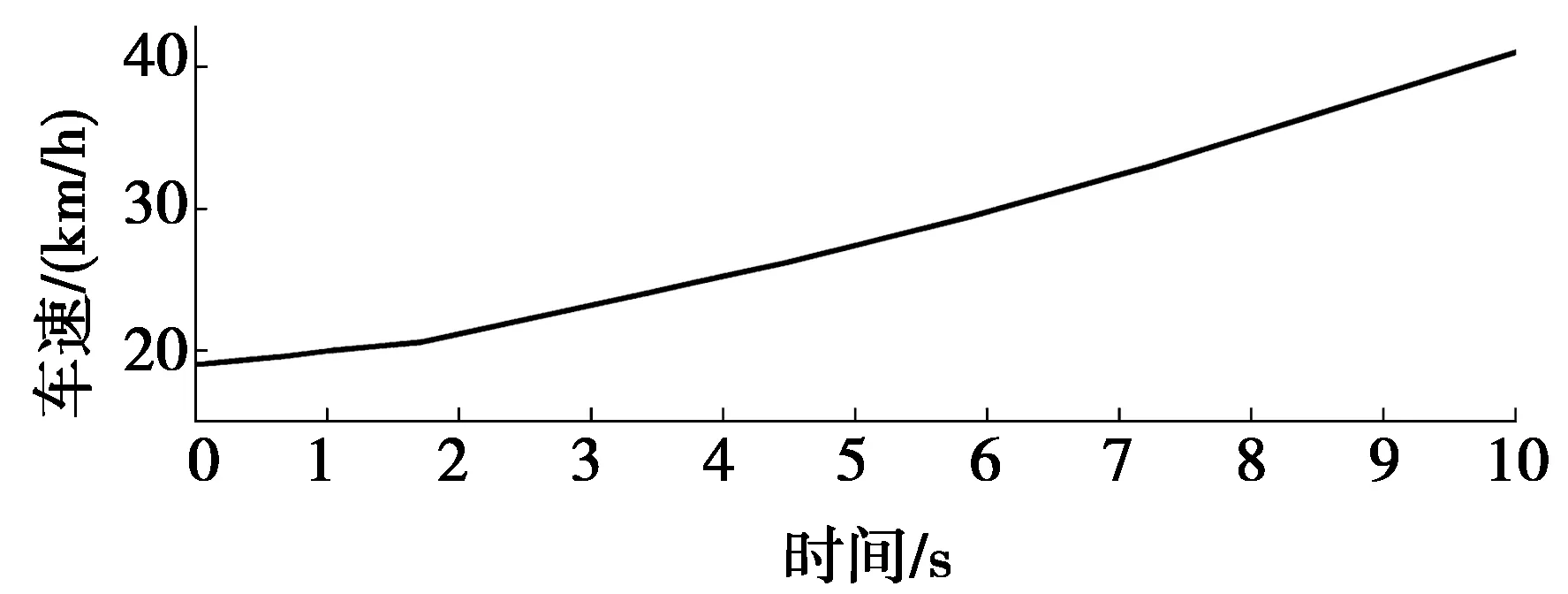
图7 试验过程中10 s内车速
由图8a可知:在采用切换协调控制策略前,发动机在模式切换时响应缓慢,不能迅速达到控制目标而且发动机转矩波动剧烈。结合图8b可以看出:采用切换协调控制策略后,电机转矩在模式切换的瞬间并没有立即减小至0 N·m,而是根据发动机的变化进行转矩补偿,与采用切换协调控制策略前相比,有效地抑制了发动机转矩波动。由图9可知:在采用切换协调控制策略后,整车冲击度由10.0 m/s3减小至3.2 m/s3,降低了68%,大大降低了汽车纵向冲击,保证了驾驶的平顺性。相比于仿真结果,试验结果在切换发生时发动机的响应相对较慢一些,这是由实际控制中发动机转矩信号传输延迟造成的,但整体上发动机和电机转矩的变化幅度和趋势对验证控制策略的有效性方面影响不大。
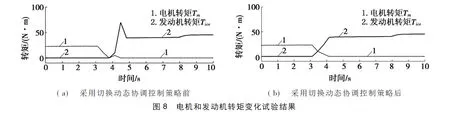

图9 整车冲击度j变化试验结果
4 结束语
(1)考虑3个阶段控制目标的不同,分别设计了基于开关控制的发动机起动、基于模型预测控制的转速同步和基于电机补偿发动机转矩突变的动态协调控制策略。
(2)与未采用切换协调控制策略相比,所设计的协调控制策略可使发动机转矩变化平缓,降低了系统总输出转矩波动程度,汽车冲击度降低了68%,改善了驾驶舒适性。
然而,本文仅设计了伴随发动机起动的切换协调控制策略,对于发动机单独驱动、行车充电和混合驱动向纯电动模式切换的协调控制研究将是下一步的工作重点。
猜你喜欢
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
消费导刊(2018年10期)2018-08-20
电机与控制学报(2018年9期)2018-05-14
汽车维修技师(2017年9期)2017-02-04
山东工业技术(2016年15期)2016-12-01
汽车维修与保养(2015年12期)2015-04-18