
航空磁异常探测中的自适应高阶过零检测器
2020-02-06 00:36:14周家新孙磊范龙单志超
兵工学报 2020年12期
周家新, 孙磊, 范龙, 单志超
(1.海军研究院, 天津 300061; 2.海军航空大学, 山东 烟台 264001)
0 引言
磁异常探测可以通过发现微弱的地磁异常来确定铁磁性目标的存在,这些铁磁性物体包括地质金属矿藏(磁感应强度的典型值约为1~1 000 nT)、装甲车辆(10 000 nT)、潜艇(1~10 nT)和未爆弹(10~1 000 nT)等[1]。与主动探测方法相比,磁异常探测通过被动检测铁磁性目标的磁异常信号来发现、定位和识别目标,属于被动探测技术的一种,且具有不被目标发现的优势[2-3]。另外,磁异常探测可以不受水、空气以及土壤等介质的影响,在恶劣天气和能见度较差条件下仍可正常工作[4-6]。
通常情况下,铁磁性目标形成的磁场大小往往小于背景磁场[7],航空磁异常探测(以下简称航空磁探)中目标的磁异常信号十分微弱[8],而检测器接收机内部热噪声、平台背景磁场干扰、平台运动干扰等影响增大了航空磁探仪对目标的探测和识别难度[9-12]。传统的磁异常探测基于单维信号分析和滤波,对目标特性以及探测区域依赖性强,导致检测器检测概率低、虚警率高[13-14]。标准正交基函数(OBF)检测器是航空磁探中一类基于目标特性的典型检测器,通过对目标信号的分解,在一个三维正交基上进行信号检测与目标的判定;传统高阶过零(HOC)检测器则是基于背景噪声的统计特性,通过噪声与目标信号间的差异进行检测判决[15-16]。以OBF、HOC为代表的两类检测器,割裂了铁磁性目标与其所处环境之间的关系,仅片面使用目标特性或噪声统计特性构造检测器,检测性能难以达到理想效果。
为了提高航空磁探中磁异常信号检测器性能,本文提出一种基于HOC法的自适应磁异常探测方法。HOC法是根据信号的统计特性以及以时间序列信号分析理论为基础的一种离散信号检测技术[17],同时也是一种基于过零数的谱分析方法[18],可以用于区分信号[19],常用于无损检测、人脸识别以及地震信号检测等[20]。事实上,铁磁性目标信号的HOC数与噪声信号的HOC统计特性不同。因此,HOC法能够用于区分目标信号与噪声信号,可以作为一种有效的磁异常信号检测方法。文献[21]提出的HOC检测仅利用信号的第2阶差分序列信息,未能充分运用HOC序列的信息。
本文通过对比分析铁磁性潜艇目标信号特征和磁噪声统计特性,提出一种基于HOC法的自适应磁异常探测方法。根据铁磁性潜艇目标信号模型、实测目标高空信号以及稳定无磁环境和复杂磁环境中长时间采集的实测磁噪声,分析目标信号和噪声的特征,研究二者之间的HOC统计特性,将信号的前5阶过零序列统计特性综合运用,设计适用于复杂环境下航空磁探的自适应高阶过零(AHOC)检测器。实验结果表明,AHOC检测器的检测效果优于常规的HOC检测器和标准正交基函数检测器,适用于复杂磁环境下的低信噪比航空磁异常探测。
1 铁磁性潜艇目标信号模型


(1)
式中:B为测量点P处通过光泵测得的目标空间磁场总场强度;γ为测量点P处的地磁倾角;θ为磁北方向到潜艇目标航向的逆时针角度。

图1 磁偶极子目标磁场Fig.1 Magnetic field of magnetic dipole target
假设航空磁探仪测线中心位于目标中心正上方,高度为200 m,测线范围a∈[-450 m,450 m],潜艇目标磁矩为Mx=80 000 A·m2,My=-20 000 A·m2,Mz=40 000 A·m2,目标航向角为0°,地磁倾角为45°,则可以得到仿真目标信号如图2所示。

图2 仿真目标信号Fig.2 Simulated target signal
选取实际铁磁性潜艇模型代替潜艇目标,获取目标高空信号,潜艇模型如图3所示。实验中,在潜艇模型中心上方10 m的高度面上沿x轴方向每隔0.1 m取1个测量点,共计151个测量点,x∈[-7.5 m,7.5 m]。在测量点处使用美国Geometrics公司研制的G-858铯光泵高灵敏度磁力仪进行测量,磁力仪性能参数如表1所示。横向测量范围为15 m,潜艇模型长度为2 m,测量范围达到7.5倍艇模长,测量高度达到5倍艇模长。实测目标信号如图4所示。
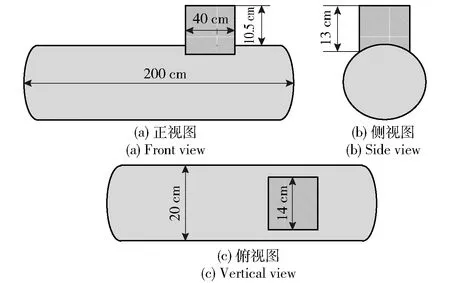
图3 潜艇模型的三视图Fig.3 Three orthographic views of submarine model

表1 铯光泵磁力仪性能参数
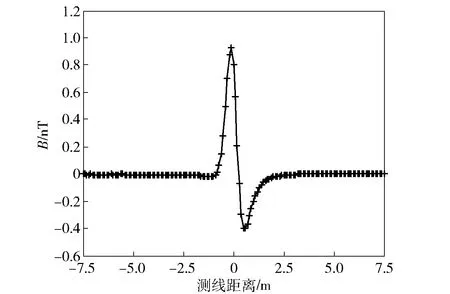
图4 实测目标信号Fig.4 Measured target signal
由图2和图4可知,铁磁性潜艇目标信号具有形如正弦函数的波峰和波谷。文献[3]中也给出了相同结论,目标高空磁异常信号的波形与正弦波形状相似,测量高度越高,波形越相似。
2 磁噪声分析
在武汉某无磁实验室以及外场环境中,分别测量得到稳定磁环境和复杂磁环境下的背景磁噪声,采集时间为2017年5月15日02:00-04:00至2017年5月26日02:00-04:00. 无磁实验室周围60 m范围内无铁磁性物体,磁环境条件良好。实验中使用G-858磁力仪进行各种环境下的高空磁噪声测量,测量得到的磁场信号数据片段如图5、图6所示。图6(a)为外场复杂磁环境中采集的磁场信号片段,图5(b)为图5(a)中磁场信号基于最小二乘拟合去除线性分量后的直方分布图。由图5(b)可知,在良好的无磁环境中,磁噪声的概率密度分布函数接近高斯分布。该段噪声去除线性分量后接近均值为0 nT、方差为0.017 nT2的高斯分布。对比图5(b)和图6(b)可知,此时磁噪声分布与高斯分布差异较大,不能够将噪声简单视为高斯分布。

图5 平稳无磁环境下的实测磁噪声及其直方图Fig.5 Magnetic noise measured in the stable non-magnetic environment and its histogram
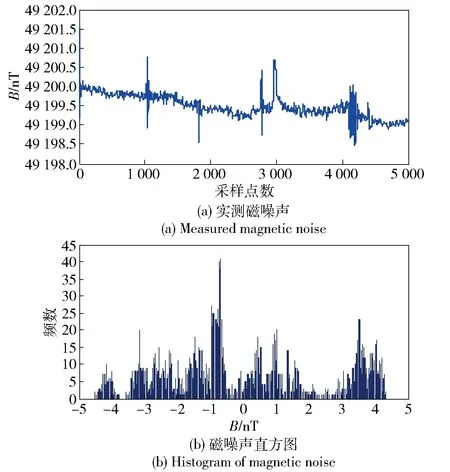
图6 复杂磁环境下的实测磁噪声及其直方图Fig.6 Magnetic noise measured in the complex magnetic environment and its histogram
根据上述分析可知,实测噪声与高斯白噪声存在显著差异,而在传统的磁异常探测中将噪声等效为高斯白噪声[7],因此基于高斯白噪声的信号检测器在航空磁探过程中并不一定能够达到最佳检测效果。
3 HOC检测法基本理论
为进一步研究铁磁性目标信号和磁噪声信号的差异,通过HOC检测法分析二者之间的高阶过零统计特性。
HOC法是基于时序信号HOC统计特性的一种信号鉴别方法,定义X={x(n),n=1,2,…,N}为一个时间序列信号,N为序列长度,x(n)为n时刻的输入信号。在同一个概率空间的随机变量x(n)(实数或者复数)的集合X为一个平稳随机过程[24]。
假设输入信号为时序信号X,过零数定义为信号去除线性分量后其数值由正变负或由负变正的总数[17]。可以在输入信号后加一个指示函数χ[·],判定输入的值[18]为
(2)
则可以得到信号X的过零数[17]为
(3)
并且过零数D满足如下条件[20]:
0≤D≤N-1.
(4)
过零率R定义为过零数与最大过零数的比值[17],即
(5)
(6)
式中:

(7)


表2 时间序列信号的高阶差分
4 噪声和目标信号的HOC数分析
采用基于实测的磁噪声、铁磁性潜艇模型目标信号、仿真高斯白噪声以及正弦目标信号,根据HOC法的基本原理,对磁噪声和目标信号的HOC数进行分析。图7所示为目标信号与噪声信号HOC特性的比较,其中实测噪声1为图5所示平稳无磁环境中测得的噪声信号,实测噪声2为图6所示复杂磁环境下测得的噪声信号,高斯白噪声均值为0 nT、方差为0.017,正弦目标信号的幅度为1 nT,实测目标信号见图4. 在航空磁探过程中,目标与磁力仪之间距离越远,目标信号越接近正弦波[25],因此在信号HOC特性的比较中加入正弦目标信号。由图7可以看出,实测目标信号和正弦目标信号的过零率在前5阶均明显小于噪声的过零率,特别地,正弦信号的过零率在前10阶均小于任意实测噪声或高斯噪声。

图7 目标信号与噪声的过零率Fig.7 Zero-crossing rates of target signal and noise
图7表明目标信号和噪声信号的前5阶高阶过零率有明显的区分度。基于HOC率的检测方法在一定程度上能够用于鉴别目标信号与噪声,从而实现水下铁磁性潜艇目标的远距离探测。基于此,进行AHOC检测器的构造。
5 AHOC检测器的实现
铁磁性目标检测问题是典型的双择检测问题,目标有两种存在状态,分别记为假设H0和假设H1. 根据输入的观测量,目标检测问题的信号模型如下:
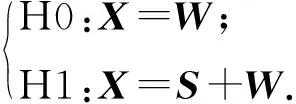
(8)
式中:W为噪声信号序列;S为目标信号序列。
在H0假设情况下,目标不存在,输入的序列信号为噪声W,其中W={w(n),n=1,2,…,N};在H1假设情况下,目标存在,输入信号X为目标信号S加上噪声W,S={s(n),n=1,2,…,N}。
目标信号序列的过零率与噪声序列之间存在差异,基于这种差异可以有效地构造检测器的检验统计量:
(9)
式中:RXk为输入信号X的第k阶过零率;RWk为参考输入噪声序列{r(n)}N的第k阶过零率,{r(n)}N可以使用实测噪声,也可以使用高斯白噪声。本文设计的检测器并不依赖于特定的噪声先验知识,{r(n)}N第1次可以使用高斯白噪声,以后自适应调整参考输入噪声。

图8 噪声输入时检测器的输出Fig.8 Output of detector for noise input
图8和图9是输入信号分别为噪声以及目标信号时的AHOC检测器输出。图8所示为H0假设情况,其中输入信号序列X和参考输入噪声序列{r(n)}N分别有两种选择,即图6所示的外场实测噪声和高斯白噪声。二者构成4种组合:组合1,X与{r(n)}N均为实测噪声;组合2,X为高斯白噪声,{r(n)}N为实测噪声;组合3,X为实测噪声,{r(n)}N为高斯白噪声;组合4,X与{r(n)}N均为高斯白噪声。图9所示为H1假设情况,其中:X选择实测目标信号和正弦信号;{r(n)}N选择外场实测噪声和高斯白噪声。二者构成4种组成情况:组合1,X为实测目标信号,{r(n)}N为实测噪声;组合2,X为正弦信号,{r(n)}N为实测噪声;组合3,X为实测目标信号,{r(n)}N为高斯白噪声;组合4,X为正弦信号,{r(n)}N为高斯白噪声。对比图8和图9可知,噪声与目标信号的AHOC检测器输出不在同一量级上,选择适当的门限能够将目标信号与噪声信号区分开,从而提高检测概率。

图9 目标信号输入时检测器的输出Fig.9 Output of detector for inputing target signal
设检测门限为β,则AHOC检测器的判决表达式为
G(X)≥β, H1;
G(X)<β, H0.
(10)
AHOC检测器可使用量化器、过零计数器ZC、求和器和判决器等组成实现,如图10所示。其中,量化器用来判定输入信号的极性,完成指示函数的作用,可以认为是限幅器;过零计数器ZC由比较器和累加器组成,主要完成(3)式的计算。实际过程中,第1次检测开始时作为参考噪声序列{r(n)}N可以使用高斯白噪声,根据每次判决的结果,由选通器单元S改变参考输入序列{r(n)}N,并通过基于归一化最小均方算法原理的自适应门限器(ATh)更新门限β,将检验统计量G(X)与门限β进行比较,以判决假设H0或假设H1成立。
6 AHOC检测器的性能分析
采用铯光泵磁力仪实际测量的磁场噪声数据和目标高空磁场信号,对AHOC检测器的检测性能进行分析,实际测量的磁场噪声数据如图6(a)所示,目标信号采用图3所示铁磁性潜艇模型产生的高空磁场信号,目标信号如图4所示。将目标信号与噪声信号叠加,目标信号淹没在实测噪声中,对目标信号加噪声进行去线性趋势处理,如图11(a)所示。目标信号宽度为300,出现在采样点1 500~1 800处。为与文献[6]中的OBF检测器性能进行比较,将目标信号与实测磁噪声之间的幅度信噪比设置为0.3. 在相同的输入幅度信噪比条件下,对比AHOC检测器与OBF检测器的输出,由图11(b)可以发现AHOC检测器的输出幅度信噪比较OBF检测器有所提升,检测性能有所增强。而文献[7]提出的非高斯背景噪声下的微弱磁异常信号检测算法适用于非高斯噪声环境,但其输出幅度信噪比仅为2,而AHOC检测器的输出幅度信噪比则大于5. 在复杂磁环境下,与文献[7]所提算法相比,AHOC检测器性能更优,能够显著提高信噪比。

图10 AHOC检测器的原理图Fig.10 Schematic diagram of adaptive high-order zero-crossing detector

图11 AHOC检测输出Fig.11 Output of adaptive high-order zero-crossing detector
对AHOC检测器进行Monte Carlo仿真分析,仿真中大量采用图6(a)所示的实测噪声数据和图4所示目标信号,基于奈曼- 皮尔逊准则,在虚警概率为0.001的条件下,各信噪比情况均仿真10 000次,同时给出传统HOC检测器以及OBF检测器对铁磁性潜艇模型的单次检测概率与信噪比之间的相互关系,与AHOC检测器的性能进行对比分析,得到如图12所示的检测概率曲线。

图12 检测器性能曲线Fig.12 ROC curved of detectors
通过图12实测数据的性能分析可以发现,航空磁探中AHOC检测器在大信噪比条件下的检测性能够满足探测需求;低信噪比的AHOC检测器相对于传统OBF检测器,其检测概率有大幅度提高。当信噪比≤0 dB时,OBF检测概率下降十分明显;当信噪比≤-2 dB时,OBF已无法区分目标和噪声。随着背景噪声的逐渐增强,当仿真信号的信噪比不断减小时,AHOC、HOC和OBF检测器对磁异常信号的检测概率不断减小,与实际情况相符,但即使在信噪比很低的情况下,AHOC检测器的检测效果仍远远优于常规的HOC和OBF检测器。当信噪比≥-7 dB时,AHOC检测器的检测概率仍在50%以上,可以较准确地探测目标。综合对比图12中的3种检测器性能曲线可以发现,AHOC检测器的检测概率在各信噪比条件下均为最大,较HOC检测器性能有所提升。综合考虑实际探测过程,目标一般远离航空磁探仪,而目标与磁探仪之间距离越远,目标信号形状越接近正弦波。又因为本文提出的AHOC检测器对正弦形状目标信号的检测性能更佳,所以在实际探测过程中,AHOC检测器更适用于复杂磁环境下的低信噪比探测。
7 结论
本文针对现有航空磁异常探测方法检测概率低、探测距离近等问题,基于铁磁性潜艇目标信号和复杂磁背景噪声的HOC特性差异,根据HOC法基本原理,充分利用信号高阶差分过零序列的前5阶信息,构造前5阶平均过零率检验统计量,设计了适用于航空磁探的AHOC检测器。实测数据性能分析结果表明:
1)良好的无磁环境中磁噪声与外场复杂磁环境中采集的磁噪声差异较大,实测噪声与高斯白噪声存在显著差异,不能够将噪声简单视为高斯分布。
2)铁磁性目标信号和磁噪声信号的HOC特性存在显著差异,前5阶HOC率有明显的区分度。基于HOC率的检测方法在一定程度上能够用于鉴别目标信号与噪声,从而实现水下铁磁性潜艇目标的远距离探测。
3)在相同的输入幅度信噪比条件下,AHOC检测器输出的幅度信噪比>5,表明其抗噪能力强。
4)当信噪比≥-7 dB时,AHOC检测器的检测概率仍在50%以上,表明AHOC检测器具有良好的弱信号检测能力。
5)基于奈曼- 皮尔逊准则,在相同的虚警概率下,AHOC检测器的检测效果仍远远优于常规的HOC和OBF检测器,适用于复杂磁环境下的低信噪比航空磁异常探测。
猜你喜欢
数学小灵通(1-2年级)(2024年4期)2024-05-14 09:30:52
华北地震科学(2022年3期)2022-07-22 07:18:28
中国测试(2021年4期)2021-07-16 07:48:54
小学生学习指导(低年级)(2019年6期)2019-07-22 03:33:10
中国交通信息化(2017年9期)2017-06-06 07:14:57
工业设计(2016年11期)2016-04-16 02:49:43
科技视界(2015年30期)2015-10-22 11:26:44
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:36
河南科技(2014年22期)2014-02-27 14:18:12
浙江电力(2014年6期)2014-01-27 03:31:37
