水下无人系统智能化关键技术发展现状
2020-02-05 06:00:20赵留平
无人系统技术 2020年6期
赵留平,李 环,王 鹏
(1.海军装备部驻武汉地区第二军事代表室,武汉430064;2.中国舰船研究设计中心,武汉430064;3.西北工业大学航海学院,西安710072)
1 引言
水下无人系统(Unmanned Underwater System,UUS)是各类无人水下航行器(Unmanned Underwater Vehicle,UUV)、水下无人作战平台及其所必要的控制设备、网络和人员的总称。在民用领域,UUS 可进行深海数据收集、资源勘探、深海救援等;在军事领域,UUS 也可进行情报收集、水下侦查、作战打击和后勤支援等[1],因此水下无人系统具有重要研究价值。
近年来,随着国家海洋强国战略的实施,人们对海洋资源的开发利用需求不断加大。UUS 虽然可以代替人执行一些“枯燥的、恶劣的和危险的”水下任务,但执行任务过程智能化程度仍处于较低水平。随着人工智能技术的迅速发展,智能化的设备已经逐渐应用到了各个领域。对于水下无人系统来说,智能化更是未来发展的重要趋势。
通过分析发现,水下无人系统智能化涉及水下通信、智能集群以及水下智能仿生等关键技术。
水下通信技术是实现智能化的关键因素之一,水下控制、数据通信、图像传输以及协同作战的配合都离不开水下通信的基础保障。传输速率、传输干扰、传输距离等因素都为水下通信的核心技术难点,也是实现智能化、集群化、协同化作战模式的跨越式发展前提,对水下无人智能化领域应用的广度、深度、可靠性与经济性有着深远影响。
单一个体作业存在局限性,未来智能化发展也必然是集群协同作战。集群系统可利用单体自主性实现集体决策以及群体级稳态,能够突破个体的单一性和局限性完成个体无法独自完成的任务;同时具有高度可扩展性和稳定性,所以集群系统有着较强的鲁棒性和灵活性,符合未来发展的需求。
水生生物经过自然的优劣选择具有极强的灵活性和适应性,采用智能驱动材料模仿或借鉴水生生物的结构以及运动方式,实现环境感知和自主学习、人机交互、动力控制和通讯系统等功能,增加其智能性、机动性、可靠性和安全性等,对未来水下智能发展具有重要意义。
通信是交互的基础,集群是协同的关键,仿生是发展的趋势。本文总结了以上技术的发展现状,并分析了这些技术未来的发展趋势。
2 水下通信技术
安全可靠的高速数据传输通信是UUS智能化、集群化、协同作战的关键技术,是水下控制、数据通信和图像传输的重要保障。通过通信系统将UUS组网,是解决特定问题的有效途径。构建多元化通信网络体系,发展传输距离远、速率大、容量高、可靠性高的传输手段,实现UUS 多平台间的数据共享,是未来水下通信技术的发展方向。本节对当前的水下通信方式进行介绍,并对新型跨介质通信技术的发展进行展望。
2.1 水声通信技术
电磁波信号在海水中快速衰减,在水下的传输距离非常有限。水声通信技术因其通信距离远、可靠性高等优点被广泛应用。世界上第一个具有实际应用意义的水声通信系统是美国海军水声实验室于1945年研制的水下电话,该系统采用单边带调制技术实现潜艇之间的通信。水声通信系统最初采用模拟调制方式,如伍兹霍尔海洋研究所在20世纪50年代末研制的调频水声通信系统,实现了水底到水面船只的通信。我国的660 型通信声纳采用单边带调制技术,实现了语音通信。
20世纪70年代以来,随着信号处理技术的迅速发展,数字调制技术开始应用到水声通信系统中。与模拟通信相比,数字通信可以利用纠错编码技术提高数据传输的可靠性,对时域和频域上的信道畸变进行相应的补偿,且抗干扰性强。早期的数字水声与通信系统大多采用非相干调制方式,其中频移键控(Frequency-Shift Keying,FSK)调制方式最为常用。1981年,美国麻省理工学院和伍兹霍尔海洋研究所联合开发了数字声遥测系统,该系统利用多进制频移键控技术实现在200 m左右距离上进行数据率为1.2 kbps的水声通信[2]。
20世纪80年代,相干调制技术被引入水声通信中。与非相干技术相比,其带宽利用率提高了一个数量级。研究人员开展了相移键控(Phase-Shift Keying,PSK)和正交振幅调制(Quadrature Amplitude Modulation,QAM)的相关研究。首先是在深海垂直信道、近距离水平信道等相位比较稳定的水声信道上进行;直到20世纪90年代,相干调制技术在中远程浅海水平信道中的应用才得到较快发展。具有里程碑意义的是在相干接收机中使用了决策反馈均衡器和二阶锁相环,实现了数据率为1 kpbs、通信距离90 km的相干PSK通信。20世纪90年代,美国Scripps 海洋研究所提出了单载波相干通信技术[3]。
20世纪90年代至今,学者们在提高通信速率和对抗信道衰落与起伏方面进行了大量的研究。90年代中后期,正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)技术被应用于水声通信,OFDM 技术能够有效对抗由信道多径时延引起的时间弥散,并且各个子信道在频域上相互重叠,大大地提高了频谱利用率。美国麻省理工学院等单位开展了多输入多输出(Multiple Input Multiple Output,MIMO)技术的研究[4],MIMO 技术采用多发多收结构,不仅能够满足多用户同时通信,还可以扩充信道容量,显著提高了通信速率和系统可靠性。
近几十年来,随着电子技术的迅速发展以及在海洋开发利用的迫切需求下,水声通信技术水平取得长足进步。水声通信技术未来的发展趋势是提高通信速率、通信距离和信道利用率,为高速率水下通信应用提供技术支撑;进一步提高通信可靠性,归纳信道多途结构特性与时空变规律;进一步提高通信系统鲁棒性并降低误码率。
2.2 水下激光通信技术
1963年,Sullivan 和Duntley 等研究发现海水中存在一个蓝绿光的透光窗口[5],为水下激光通信的研究指明了发展方向。20世纪70年代至80年代中期,美国完成了水下激光通信技术方案的设计,并完成了原理验证性实验,证实蓝绿激光在浑浊海水中能够进行通信。80年代中期至90年代,美国研究重点集中在信号的调制/解调、“海水信道”的物理模型和编/解码技术等方面,期间完成了空-地、星-地以及极地长距离通信链路的试验验证[5-7]。2008年,美国Hanson 等首次在实验室实现了传输速率高达1 Gb/s 的水下光通信[8]。2010年,美国麻省理工学院的Heather 开发了基于超亮蓝色LED 的发射器系统和基于蓝色增强广电二极管的接收器系统,该系统在13 m 的传输距离上传输速率可达3 Mbps[9]。2018年,俄罗斯Kirillov 等设计的实时水下光通信系统传输速率达到100 Mbps,误码率不超过10-7,传输距离可达数10 m[10]。2014年,姚灿设计了基于开关键控(ON-OFF Keying,OOK)调制的水下实时光通信系统,该系统在串口速率为9600 bps 时,传输距离可达27 m[11]。2018年王培林等采用448 nm 蓝光作为光源,实现了25 Mbps 传输速率,10 m 传输距离的低成本OOK 水下光通信系统[12]。
水下激光通信具有传输码率高、安全性高、抗干扰性强、传输延迟短等优点,但距离实用化还有一定距离。激光与海水中物质间相互作用会产生复杂效应。海水中的水分子、浮游植物和岩屑会不同程度地对激光产生吸收效应和散射效应,限制信号的传输距离及性能;海水介质折射率的变化,会使水下激光通信信道表现出湍流效应[13],强湍流效应会导致通信系统能力恶化。水下激光通信传输需要直线对准,具有极强的方向性,通信时必须知道目标的大致位置,通信距离较短。
未来对水下激光通信的需求应当是高保密、高速率、低时延、大容量的。水下激光通信的发展趋势包括:在保证传输性能的基础上添加有效的加密算法,发展安全性更高的水下激光通信系统;结合水声通信与激光通信的优点,发展混合声光通信系统;提高通信容量和速率,发展实时水下激光通信系统。
2.3 水下-空中跨介质通信技术
借助水下无人平台、水面浮标、岸基等通信资源,通过节点间的相互通信,构建多平台、网络化的通信系统,从而实现UUS 海空天三位一体协同工作。其中,水声组网通信技术、水下中继水声通信技术和水下-水面-空中一体化中继通信技术亟待突破。由于通信节点的网络覆盖范围是有限的,限制了通信距离和灵活性,促使新型跨介质通信技术的发展,如水下中微子通信[14]、引力波通信[15]和水下量子通信[16]等技术等。
中微子具有极强的穿透能力,高能中微子束穿过地球后,其衰减不足千分之一,满足深海任意深度的通信需求。中微子通信是利用中微子粒子作为载体的通信技术[17],具有通信容量大、抗干扰能力强、保密性好等优点。1984年美国一艘核潜艇做环球潜行时,采用了中微子通信技术。1998年6月,日本科学家首次发现了中微子振荡的确切证据。随后,研究人员对中微子振荡以及探测器进行了大量试验研究,为水下中微子通信提供了理论依据。近几年,美国开展了中微子相关的通信试验,试验结果表明,进行中微子通信须借助类似粒子加速器的大型设备,技术要求复杂。
引力波是一种以光速传播的横波,具有很强的穿透力,没有任何物质能够阻挡引力波的传播。引力波在水中传播时,能量被损耗一半时的传输距离为1029 km,引力波的能量与其振动频率的6 次方成正比,通过加快物质的振动频率可提高发射能量,进一步扩大引力波的通信距离。由于引力波较为微弱,对其探测存在困难。目前引力波探测主要基于迈克尔逊激光干涉仪,研究人员已开展相关探测实验[18-20]。理论上可以采用任何频率的引力波进行通信,但对于极低频率几乎无法探测。研究人员在极低频和高频引力波探测技术上开展了大量的研究,随着探测技术的发展,水下引力波通信将是水下通信的最好选择之一。
量子通信利用量子相干叠加、纠缠效应进行信息传递,具有抗干扰性强、保密性强和隐蔽性好等优点[21]。量子不确定原理和未知量子的不可克隆定理,这两个性质使得量子通信具有天然安全性,满足军事通信的基本要求。陆地上量子通信已经实现了144 km 的信息传输。2014年4月,Shi 等发表研究报告,认为短距离的水下量子通信是可能的,并计算得出水下量子通信系统在清澈海水中最远传输距离为125 m[22]。嵇玲开展了单光子极化量子态和纠缠光子在海水中的传输和保持特性相关实验研究[23]。2017年8月,上海交通大学金贤敏团队成功进行了首个海水量子通信实验,首次通过实验验证了量子通信在水下应用的可行性。水下量子通信对于保证信息安全,提高信息传输准确性具有很高的价值,但目前水下量子通信距离较短,无法实现水下远距离通信,且量子制备及测量技术还不成熟。
水下-空中跨介质通信技术的关键是研究空中和水下一体化通信方式和能力。目前,中微子通信、引力波通信和量子通信等新兴通信技术性能优异,发展前景广阔。但对于这些技术的研究与探索尚处于初期阶段,进入实际应用仍有很长的路要走。当前,水下无线通信还面临着水中通信距离短、容量小,传输速度低,无法完全实现实时通信等问题。将通信技术组合化,如结合水声通信的长传输距离优势和水下激光通信的高传输速率的优势,可以实现通信性能的倍增;将通信方式网络化,能够在局部位置快速形成通信网络,实现实时的信息交互。随着信息技术的发展和研究的深入,水下通信技术将逐步发展,为水下军事斗争和资源开发提供强有力的通信保障。
3 水下集群技术
随着UUV技术日渐成熟,其所面临的任务难度和复杂度也有很大提升,单一UUV 在大范围内作业的时效性、鲁棒性和灵活性等方面表现出明显不足。因此,多UUV 以集群(Swarm)的形式互相协作执行任务成为了UUV 群体智能化发展的必然趋势。本节探讨影响UUV 集群个体能力与整体效能的关键技术问题,为其将来的发展提供参考。
3.1 集群优化技术
集群优化是集群系统的核心技术,其通过合理控制每个UUV 的活动,使UUV 间能够相互联系并合作,使任务执行时间最少或能耗最小,从而将集群的优势最大化。该技术根据不同任务的客观条件提炼出优化数学模型,随后将适合的智能算法引入,并根据不同的海洋环境对算法进行一定的改进,以实现集群智能控制。现阶段,在UUV 集群的路径跟踪[24-25]、编队控制[26]和协同围捕[27-28]等问题上都有着大量的应用。如在协同搜寻任务上将问题定义为目标被发现最大概率,并引入海底地形环境,对群UUV 运动加以约束。利用贝叶斯网络算法求解,得到如图1所示的搜寻路径。类似地,在协同围捕的任务中,定义了以最短狩猎时间为目标的优化模型,并将避障机制引入蚁群算法进行求解,围捕过程如图2所示。此外,受自然界群体行为的启发,很多智能控制算法被应用于UUV 的集群控制,比较常用的算法有:人工势场法[29]、蚁群算法[30-31]、粒子群算法[32]和强化学习等方法[33-36]。其中,人工势场法为经典的算法,其将UUV 附近的威胁或障碍视为斥力场,将任务目标作为引力场,进而实现集群的无避碰控制。该方法求解效率较高,但容易陷入局部最优。蚁群和粒子群算法属于启发式方法,即模拟自然界中存在的群体行为,并应用至集群的协同控制。具体地,蚁群算法,是模拟蚁群社会中蚂蚁之间的分工合作机制,来有效地解决UUV 协同多任务分配问题;粒子群算法,是通过分析鸟类觅食过程中的鸟群飞行方式,来解决复杂环境下的多无人机编队重构控制问题。启发式方法实现简单,编码容易,在大多数情况下能够找到全局最优解,然而这类方法通常需要大量的函数迭代,优化效率较低。强化学习法利用大量的先前任务数据建立人工神经网络模型,以便在UUV 集群任务中预测各UUV 的行为并制定合作策略,以实现最优的集群决策。该方法可以实现UUV 间的自主博弈与独立决策,具有广阔的应用前景。但这类方法在任务开始前需要大量的真实数据来构建神经网络模型,导致耗费大量的人力物力,并且预测行为常常存在误差和不确定性,影响集群决策。强化学习法目前处于起步阶段,相信随着人工智能的发展,神经网络技术的进步,所需的先前数据会变少,预测行为的精度会提高,强化学习法也将更具竞争力。

图1 UUV集群协同追踪路径Fig.1 Cluster collaborative tracking path of UUV

图2 UUV集群智能围捕Fig.2 Cluster intelligence seizing of UUV
然而,由于海底复杂环境和恶劣通信条件的限制,很多算法不能直接被移植到UUV 集群应用当中。因此,现有智能算法在海洋环境的应用以及适用UUV 集群的新智能控制算法的开发仍是未来UUV集群控制技术的关键所在。
3.2 集群任务规划
集群任务规划是指根据所执行任务的具体要求以及可用UUV 类型和数量、必经路径点等约束条件,利用水下环境、UUV功能性能、目标属性特点等基础数据,对任务执行过程中各UUV 的工作状态和使用方式进行规划,如规划任务配置、开关机时间、侦察/发射角度、参数设置等。研究高效率协同多任务规划方法是提升UUV 集群效能的重要途径,具有重要的理论和实际意义。UUV集群任务规划技术起步相对较晚且十分复杂[37-38],目前的研究主要是改进多无人机任务分层规划(Hierarchical Planning)的方法[39-45],即将问题分解成决策层(Decision-making Layer)、路径规划层(Path Planning Layer)、控制层(Control Layer)等多个层次。其中,决策层负责集群顶层的任务决策、冲突消解、任务重分配和指标评估等;路径层负责任务执行中的运动规划,生成适应海洋环境的安全航线,以引导UUV 规避威胁、障碍等;控制层则保证UUV准确的沿着生成的路径航行,并进行一定的冗余管理以降低干扰等因素的影响。如图3所示,三个UUV 需要对一些水下固定探测点进行巡逻维修。指挥中心根据最初的任务状态对UUV 进行规划。每当UUV 抵达探测点后,其将自身状态、海洋环境等任务参数向指挥中心进行汇报。指挥中心得以重新评估并更新UUV 任务序列。随后UUV 根据更新后的序列调整自身运动控制参数。通过这种嵌套式的多层规划方式,最终得到多UUV 的协同巡逻路径序列。分层规划的思路可以很好的梳理和降低多UUV 协同规划的复杂性,是解决该问题的有效手段。有了分层规划的思路之后,需要对多机协同任务规划问题进行建模与求解。从运筹学的角度来看,该问题属于一类复杂的组合优化问题。对该优化问题进行建模与求解的方法有很多种,大致可以分为集中式和分布式两类[46-49],两者各有千秋。集中式的发展时间要早于分布式,但由于分布式在动态、不确定的场景下和实时性要求等方面的适用性更广泛,成为现阶段的研究热点。
综合异常自动圈定利用GeoIPAS软件内专题图件下单元素异常图功能实现,相当于把综合异常指数(Z)值作为一组单元素测试值对待。
此外,集群规划技术涉及的大量难点还需要进一步攻关。包括如何完成大规模群体多主体、多任务、多层级、多分支的非线性任务规划,如何处理大规模集群中单机协同、群间协同等复杂协同关系,如何能够将任务经验以机器能够识别的程序化语言进行表达等。作为未来智能化水下的重要力量,对UUV 集群任务规划的研究必须加大力量,持续深入进行。

图3 UUV集群巡逻任务的分层规划方法Fig.3 Hierarchical planning method for cluster patrol tasks of UUV
3.3 集群编队
集群编队技术是智能集群执行任务的安全基础和最基本形式。编队技术是指智能集群在执行任务过程中,如何形成并保持一定的几何构型,以适应平台性能、水下环境、作业任务等要求的技术,主要解决两个问题:一是编队构成与重构,包括行动前编队生成问题,遇到障碍时编队的拆分、重建等问题,增加或减少UUV 的编队重构问题等;二是编队保持,如图4所示,包括行动中编队保持问题,在不同几何形态间的编队切换问题,保持几何形态不变条件下的编队收缩、扩张、旋转控制问题等。目前集群的研究主要针对少数UUV 的编队,主要的编队技术方法分为虚拟结构方法、领航者-跟随者方法和人工势场法[50-54]。然而这些方法很依赖通信,不能摆脱水下通信受限对编队技术的影响;而且现阶段关于一致性的研究主要局限于理论分析和仿真,还没有具体的应用实例。
因此,新形势下对智能集群提出了的新要求:一方面要加强无人智能个体自主性,使其能够自主处理各种敏感信息,对当前和未来作业任务做出规划与预测,遵循感知、评价、决策这样的认知决策过程,以减少通讯的要求;另一方面是加强UUV 间的局部通讯能力,通过与附近平台的随时信息交互,可以快速达到局部的编队最优。

图4 编队队形保持技术Fig.4 The schematic map of formation keeping technology
目前,UUV集群的智能化技术,在集群优化、任务规划与集群编队等方面已经取得了初步的研究成果。但仍有以下难点:(1)水下恶劣的通讯条件一直是限制UUV 集群发展的主要难题,因此如何在集群协作中降低远距离通讯次数,提高通讯效率,是一个有前景的研究方向。理论上,分布式任务规划可以实现这一目标,但现阶段该方法在实际工程中仍不够成熟。(2)受限于复杂的海洋环境,相关的导航控制理论与算法不能及时的得到验证。因此,需大力发展UUV 集群实验平台、测量方式、任务度量方法等实验技术,使相关理论可以得到有效验证。(3)目前集群的研究主要针对少数UUV 的编队和协作控制,这也限制了UUV 集群的发展潜力。因此设计高效的智能算法,以快速解决大规模集群中的优化问题是另一个重要的研究方向。
4 水下智能仿生技术
水下仿生机器人是水下无人系统智能化的关键技术之一。随着人类对海洋环境的深入探索,开发能够适应复杂海域并且具有多种功能的水下机器人的要求愈加迫切。水生生物在漫长的自然选择中具有优良的灵活性和强大的环境适应性,模仿水生生物的结构以及运动方式,结合智能驱动材料,设计功能趋近于水下生物的水下仿生机器人是近些年的重要研究方向。
设计者通过研究水生生物的运动机理,构造水下仿生机器人的运动机构使其实现特定的运动形式。水生生物的运动方式主要分为3 大类[55-56]:身体和/或尾鳍推进(Body and/or Caudal Fin,BCF)、中间鳍和/或对鳍推进(Median and/or Paired Fin,MDF)、喷射推进(JET),水下仿生机器人的设计也基本参考这些典型的运动方式。传统水下机器人的电机螺旋桨驱动方式很难满足仿生机器人的运动要求,水生生物通常具有柔软的外形、复杂多变的运动方式,可以实现“无机械关节的原位”驱动的智能驱动材料成为仿生机器人的重要选择。智能驱动材料主要包括形状记忆合金/聚合物(Shape Memory Alloy/Polymer,SMA/SMP)、压电陶瓷、离子聚合物金属复合材料(Ionic Polymer-Metal Composites,IPMC),介电弹性体(Dielectric Elastomer,DE)等。使用这些智能驱动材料可以较好地实现连续柔性运动,有效达成水下仿生机器人模拟水生生物运动的目标。
通过模仿水生生物的运动方式,近年来国内外已经开发设计了各种水下仿生机器人,下文将对这些机器人进行具体介绍。
4.1 BCF水下仿生机器人
波动型的BCF 运动方式常见于带鱼和鳗鱼,是一种类似蛇形运动,通过全身的起伏波动来进行推进。中国科技大学与南阳理工大学共同开发了以SMA 材料驱动的蛇形机器人[57],如图5所示,该机器人采用聚氨基甲酸酯材料的弹性体连接多个躯干,弹性体两侧分别固定一条SMA 作为驱动器,通过收缩不同侧的SMA 实现多段躯干的波动运动。东京工业大学也开发了以IPMC材料驱动的蛇形机器人[58],如图6所示,该机器人取消了躯干之间的弹性体,而是直接以驱动材料IPMC 制成的薄膜连接各个躯干,并且在每个躯干底部附着了鱼鳍以提高驱动效率。
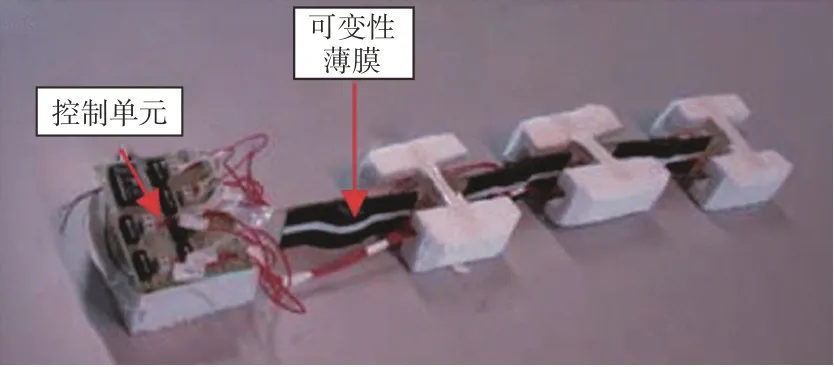
图5 SMA材料驱动波动型BCF水下蛇形机器人[57]Fig.5 SMA driven undulatory BCF underwater snake robot[57]
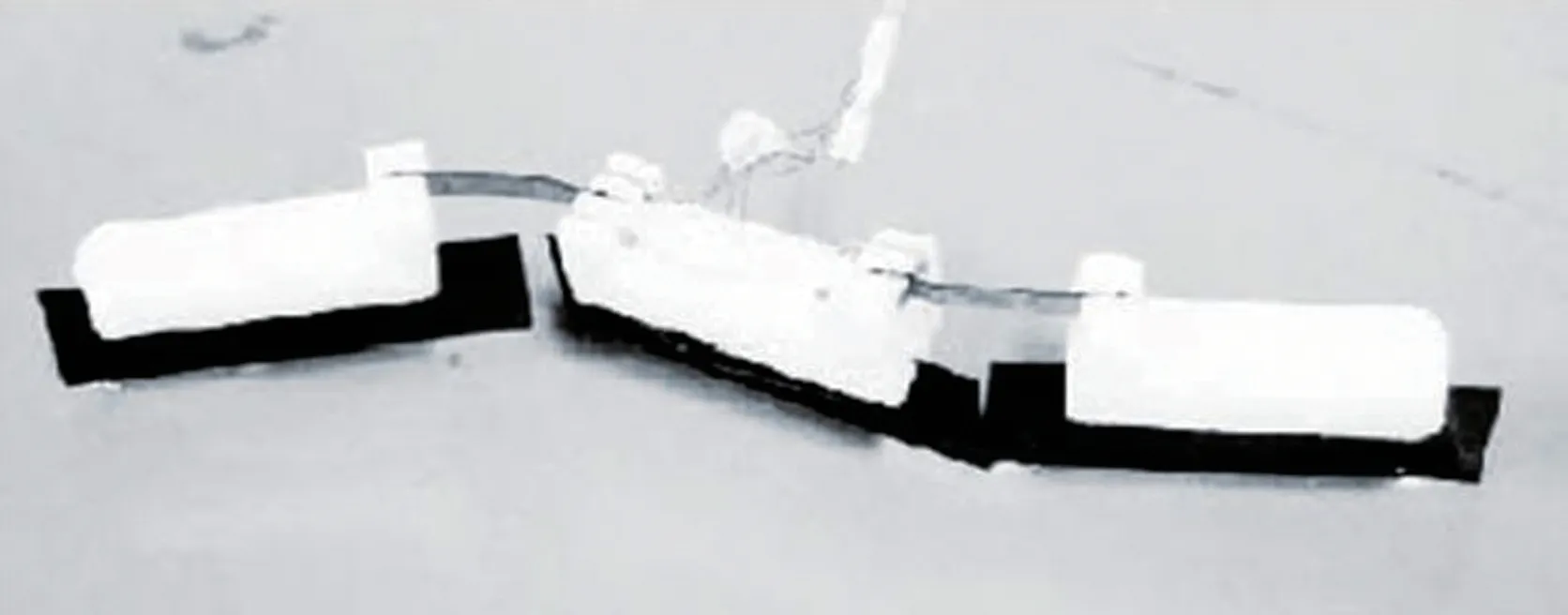
图6 IPMC材料驱动波动型BCF水下蛇形机器人[58]Fig.6 IPMC driven undularoty BCF underwater snake robot[58]
摆动型的BCF 运动方式是最常见的鱼类运动方式,通过特殊的驱动方式使躯干左右两侧不对称地交替收缩舒张,在前端产生低压涡推动前行。西班牙马德里理工大学研究了一种由SMA 材料驱动的仿生机器鱼[59],如图7(a),通过SMA 驱动鳍实现柔性鱼骨结构的连续弯曲从而产生推进力。美国麻省理工学院设计了一种充气式的仿生机器鱼[60],如图7(b),采用硅胶材料制成躯干,通过对躯干左右两侧对称分布的气室交替充气使两侧杨氏模量交替变化实现弯曲运动。
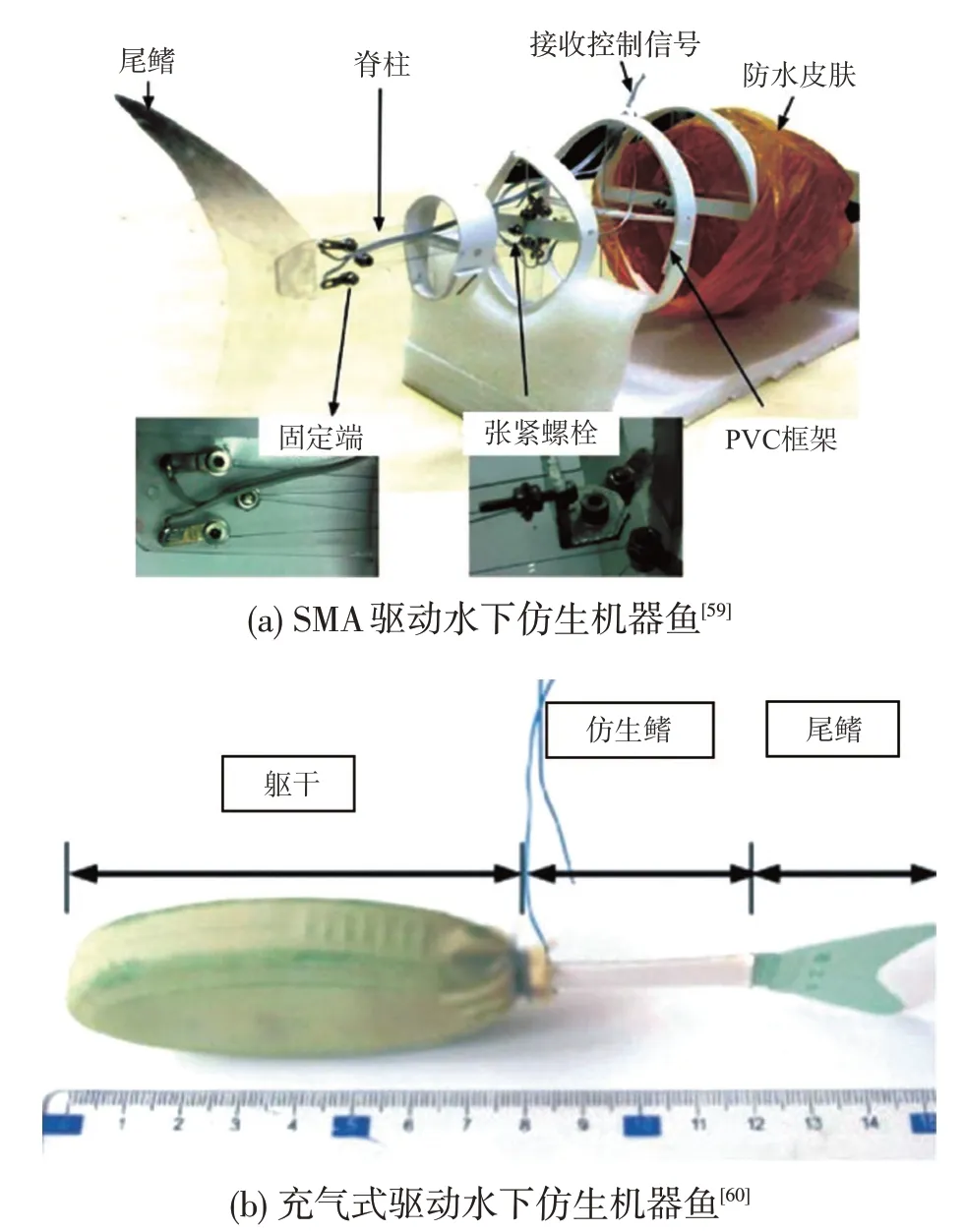
图7 摆动型BCF水下仿生机器人Fig.7 Swinging BCF underwater bionic robot
4.2 MDF水下仿生机器人
MDF 是通过胸鳍的运动产生推进力的一种方式,常见于蝠鲼和鲀科的鱼类,可以细分为波动型和扑动型。
波动型的MDF 运动方式通过胸鳍的对称波动实现前行,通过调节波动的频率、相位以及幅值,实现水下仿生机器人的转向操作,稳定性较高。美国弗吉尼亚大学仿照蝠鲼胸鳍的波动运动,开发了采用IPMC 材料驱动的仿生蝠鲼机器人[61],如图8(a)所示,机器人的一对胸鳍是由4 片长条状的IPMC材料与聚二甲硅氧烷(Polydimethylsiloxane,PDMS)材料无缝黏合得到的膜,每片IPMC 都可以单独控制,通过产生不同幅值和相位波动控制机器人在水下进行复杂的运动。哈尔滨工业大学受乌贼的鳍的波动运动启发,研究了一种采用SMA驱动材料的水下仿生机器人[62],如图8(b)所示,该机器人的一对鳍采用了多片等长的SMA材料作为驱动器,这些驱动器类似乌贼鳍的横向肌肉纤维,通过周期性波动实现机器人的运动。
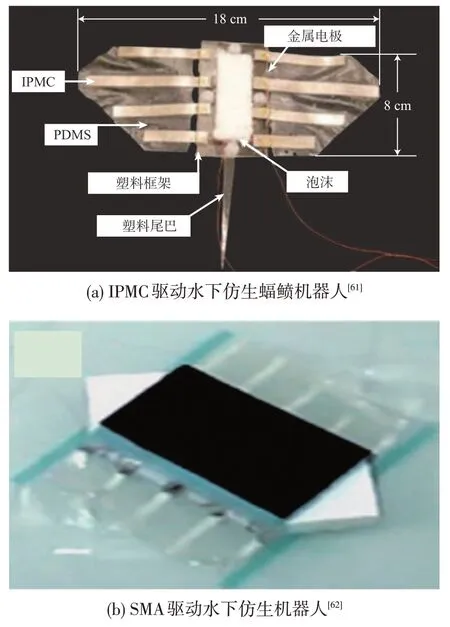
图8 波动型MDF水下仿生机器人Fig.8 Undulatory MDF underwater bionic robot
扑动型的MDF 运动方式通过胸鳍的拍动产生推进力,这种运动方式的对称结构机器人设计简单,制造方便,游动速度较快,是研究的热门。浙江大学的李铁风研究组根据这种运动方式研制了采用DE材料驱动的水下仿生机器人[63],如图9(a),该机器人使用硅胶框架作柔性身体,使用硅胶薄膜作鱼鳍,通过对中部的DE 驱动材料通电使其收缩舒张带动硅胶框架外变形,从而带动鱼鳍扑动前行。北京航空航天大学开发了以充气驱动实现扑翼运动的水下仿生机器人[64],如图9(b),该机器人有两根固定的弹性管,通过充气使弹性管在径向扩展、轴向收缩,达到类似肌肉收缩的效果,实现鱼鳍的扑动。
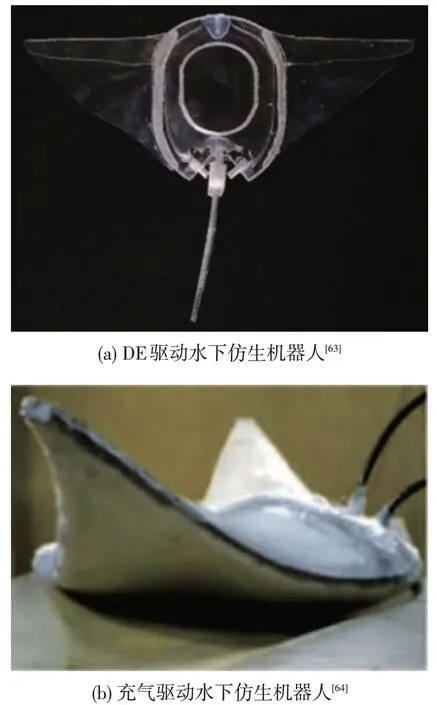
图9 扑动型MDF水下仿生机器人Fig.9 Flapping MDF underwater bionic robot
4.3 JET水下仿生机器人
JET 常见于水母和乌贼,这种运动方式主要通过类似水泵的装置进行吸排水,通过迅速排水产生的反冲力驱动水下机器人前行,这种运动方式的水下仿生机器人定向性好、制作方便、加速度也高。
日本香川大学研究了使用SMA和IPMC材料共同驱动的仿生水母机器人[65],如图10(a),该机器人主要由头部、触手、中间轴和薄膜组成。触手一端连接头部,一端连接IPMC 驱动器,通过IPMC 驱动器的弯曲可以控制机器人的姿态。中间轴通过SMA材料的薄膜与触手相连,SMA驱动器可以控制机器人伞体内部空间的大小,通过吸排水实现推进运动。美国弗吉尼亚理工学院进一步研究了一种SMA材料驱动的仿生水母机器人[66],如图10(b),该机器人将8 条SMA 和弹簧钢一起嵌入硅胶中制造水母的伞状外形,通过SMA材料的弯曲来控制内腔体积的大小,有效地提高了传统SMA驱动器形变不足的缺点,提高了驱动效率。

图10 喷射推进仿生水母机器人Fig.10 Jet-propelled bionic jellyfish robot
哈尔滨工业大学参考乌贼的喷射推进方式研究了SMA 材料驱动的仿生喷射机器人[67],如图11,该机器人由仿生外套膜和漏斗组成,仿生外套膜中SMA 丝连接筋条,通过SMA 丝的变形控制仿生外套膜的收缩和扩张,从而实现喷射运动。
当前的水下仿生机器人大多采用SMA、IPMC、DE 等智能驱动材料进行仿生结构设计以及运动驱动,能够较好地模仿水生生物的柔性连续运动,并且具有较高的隐蔽性。然而,智能驱动材料本身的特性使得水下仿生机器人的推进力、响应速度等性能与传统的电机驱动水下机器人仍存在较大的差距,因此对智能驱动材料进行机构设计优化以及开发性能更好的智能驱动材料是未来的一个主要研究方向。此外,水下仿生机器人除了驱动结构采用智能驱动材料外,其余部分大多仍采用刚性结构,因此开发大变形、自由度更高的水下仿生机器人也是未来的一个研究方向。

图11 SMA驱动的水下仿生喷射机器人[67]Fig.11 SMA driven underwater bionic jet robot[67]
4.4 水下仿生机器人智能化关键技术
当前国内外开发的水下仿生机器人大多采用SMA、IPMC、DE等智能驱动材料进行仿生结构设计以及运动驱动,虽然这些智能驱动材料能够较好地模仿水生生物的柔性连续运动,但是普遍存在一些缺点。SMA驱动频率低,并且其形状记忆效应与温度变化相关,容易受环境温度影响;IPMC 的驱动功率小,导致机器人的游动速度和推力相对较小;DE需要较大的驱动电压,并且需要预拉伸来发挥驱动作用,限制了其在更大水域范围的应用。因此,智能驱动材料的机构优化设计和材料机理研究是水下仿生机器人智能化的关键技术之一。需要针对智能驱动材料进行驱动结构的自适应设计和优化,最大限度地提高推进速度和效率,并且进行材料本身的机理研究,开发和应用性能更好地智能驱动材料,使水下仿生机器人的适用性更广。
智能仿生运动控制技术也是水下仿生机器人智能化的关键技术之一。不同于以往采用电机驱动的机器人,水下仿生机器人的运动形式多是模拟水生生物的运动方式,传统桨舵的运动控制形式并不适用。针对BCF、MDF、JET 这三种运动方式,需要研究更加高效智能的运动控制技术,使水下仿生机器人各方面的运动性能都更加接近真实的水生生物,以获得更好的流体动力学效果,提升运动速度,实现运动性能的优化。基于中枢模式发生器(Central Pattern Generator,CPG)的控制方法模仿动物节律运动的生物学控制机理,可以提高机器人的运动稳定性和环境适应性[68],但目前CPG模型理论基础仍不完善,并且缺少一个成熟的针对指定运动设计CPG模型的理论,是智能仿生运动控制技术的重要研究方向。
基于机器学习的自主决策技术是水下仿生机器人智能化的另一个关键技术。智能驱动材料的机构优化设计和材料机理、智能仿生运动控制技术的研究都是针对水下仿生机器人接近水生生物智能运动模式的关键研究,而基于机器学习的自主决策技术是使单个水下仿生机器人具有全面的环境认知能力、自适应能力和自主规划能力的关键研究。徐亮等[69]使用深度学习研发了更加通用、稳定性更好的机器鱼目标识别算法,避免了环境光线的不利影响;林龙信等[70]围绕波动鳍的水下仿生机器人进行了增强学习控制方法研究,提出了增强学习姿态镇定方法和增强学习轨迹跟踪方法,并证明了有效性。通过融合机器学习技术,使水下仿生机器人具有类水生生物的水中定位和环境感知效果,能够快速适应复杂多变的海洋环境;并且可以迅速理解任务并进行合理的任务分解,实现多任务和复杂任务的智能规划决策。
5 总结与展望
水下探索与作业任务日趋复杂,水下对抗形式在不断升级,传统单一的无人水下航行器已较难高效完成目标任务。水下仿生机器人可以模拟水下生物的形态,通常体积较小,能够很好地在复杂水下环境中隐藏自己,保证存活;同时,它们使用仿生原理进行推进,能大大节省能源。这两种特点使得水下仿生机器人能更长时间执行各种危险任务。此外,与传统无人水下航行器相比,水下仿生机器人的制造成本也相对更低,具有高效的作战效能。另一方面,水下仿生机器人通常体积较小,单个机器人的有效载荷少,所能执行的任务级别低。而水下集群技术的出现,可以有效弥补这一缺点。通过将整体任务进行分解,针对性地配置不同类型的仿生机器人执行不同子任务,使整个集群能够完成各种复杂且危险的任务。而实现有效集群的关键在于可靠、实时的水下通信。如果无法实时有效通信,会极大影响集群的整体性能,单个机器人会无法及时上传个体任务完成情况、确定当前集群的任务总进度以及更新任务目标,导致整个集群的任务失败。综上所述,未来水下无人系统智能化的关键将集中在水下通信技术、水下集群技术和水下智能仿生技术。
通过对水下无人系统智能化关键技术的现状分析,未来水下无人系统智能化的研究方向应包含以下几个方面:(1)提高水下通信的速率和传输距离,降低误码率,为UUS 智能化提供安全可靠的高速数据传输通道,同时研究体积更小、重量更轻、能耗更低、成本更低的通信单元,便于在水下仿生机器人上的应用;(2)引入人工智能技术,提高水下无人系统的自主性,加强各水下节点间的局部通讯能力,实现快速局部最优编组,采用分布式优化技术,降低水下恶劣的通信条件对集群控制的影响;(3)研究性能更好的智能驱动材料,开发大变形、自由度更高、成本更低的水下仿生机器人。
6 结束语
海洋是我国经济可持续发展的重要战略空间,更是国家安全的重要屏障。UUS 作为海洋资源探索和海洋防卫的重要装备,是我国建设海洋强国的重要组成部分。如今各国都在大力开展UUS 的研制和开发,随着人工智能技术的迅猛发展,智能化水下无人系统是未来发展的趋势,也是我国实现弯道超车的突破点。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20 11:45:04
房地产导刊(2020年11期)2020-12-28 01:32:30
铁道通信信号(2019年4期)2019-10-10 03:42:56
军事运筹与系统工程(2019年4期)2019-09-11 06:39:58
电子制作(2018年11期)2018-08-04 03:25:40
中国交通信息化(2017年3期)2017-06-08 06:09:28
知识就是力量(2017年2期)2017-01-21 18:29:36
通信电源技术(2016年1期)2016-04-16 04:57:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31