
基于线轴结合的过饱和交叉口群信号实时优化方法
2020-02-04 01:57:04贾彦峰曲大义韩乐潍洪家乐
科学技术与工程 2020年36期
贾彦峰, 曲大义, 韩乐潍, 林 璐, 洪家乐
(青岛理工大学机械与汽车工程学院, 青岛 266520)
类似于交叉口的过饱和状态定义,当交叉口群路网通行能力小于交叉口群内的交通需求时,可认为交叉口群处于过饱和状态。某个交叉口的控制效果最好并不能实现交叉口群的控制效果最优,关于交叉口群的划分,不同的学者采用了不同的方法,沙志仁等[1]通过考察不同子区数量下的全路网交通运行离散度,得到最优的路网子区数量及相应的划分方案;王浩等[2]使用聚类分析划分算法,以交叉口的流量为依据,通过建立相异性函数,衡量聚类中交叉口的相似性对交叉口进行分类划分;卢守峰等[3]针对传统K均值聚类算法在非均质路网划分应用中的不足,将路网连接性融入算法,解决其在路网划分应用中聚类结果不连续问题;唐秋生等[4]则提出了一种基于改进自组织映射神经网络的信号协调控制交叉口群划分方法,并根据最大流最小割理论识别路网瓶颈,以瓶颈为基点向外划分交叉口群。其共同点主要是对交叉口群内关联性强的各交叉口进行联合控制,以避免因某个路段或交叉口发生拥挤,进而扩散到周围路段造成整个区域交通服务水平急剧下降。在区域协调控制研究上,黄明霞等[5]将微粒群算法应用于过饱和状态交叉口群信号协调优化中,并通过仿真验证了各交叉口的延误车辆数,停车次数均有所下降,有效缓解了交通拥堵;关金平等[6]结合路网的关键路径与相关交叉口群来优化交通信号控制策略与模型算法,使路网运行效率得以提升。路婷等[7]以路网拓扑结构为基础的交叉口重要程度估计模型,从全局的角度根据有向深度搜索算法建立了一种均衡疏导路网交通流的信号协调控制方法,并通过仿真结果表明了方法的有效性。常云涛等[8]提出了一种具有普遍适应性的信号配时优化模型,其将主交叉口左转车流转移至次级交叉口的方式实现主交叉口二相位控制来提高主交叉口的通行效率,并对主次交叉口相位差优化进行分析,给出了最优相位差的求解方法,进一步简化了模型的求解流程。可以看出学者们多采用的是分时段的定时信号控制,这种静态的控制方式无法实时反映交叉口群交通运行状态的变化,也就无法通过信息的反馈对控制方案的作用进行评估和改善。多数的信号优化以相邻交叉口为基础进行固定周期内的相位差优化,忽略了实时的交通量变化和交通口群表现出的整体特性,针对此问题,建立实时动态信号控制框架,其有效性与交通控制策略、算法、参数的适用性密切相关。为反映路网的拓扑特征,寻找全局最优解,现结合以关键路径和次关键路径为基础的交叉口群交通控制思想,采用线轴结合法对相位差和周期进行滚动优化,通过考虑不同的约束条件获得各条路段的信号配时参数,最后通过仿真验证方法的有效性。
1 交叉口群动态控制优化的流程
城市道路交叉口群作为路网中关联性较强的交叉口集合, 其合理划分对路网交通运行状态有着显著的影响,也是后续交通信号控制方案优化的重要基础。对于交叉口群的划分,前文已述众多学者的不同划分方法。采用文献[9]中综合考虑路径长度、路口流量、排队长度、车流离散和起止点(origin destination,OD)路径分布等影响因素建立的基于关联度的交叉口群划分方法,该方法能够较好地弥补单指标模型的不足。涉及的交叉口群也是基于此方法进行的划分。
交叉口群动态交通信号控制采用滚动优化和时间离散的思想,将交叉口群各交叉口的历史数据和当前时间点的数据作为输入数据进行短时交通流预测,进而判别交通运行状态。滚动优化即将时间段进行细致划分,得到数个滚动区域,每个时间段分为前部和后部两个部分,前部负责上一次滚动计算的优化方案,后部同前部同样进行信号优化,但鉴于其依靠预测的数据,在精确度上不如前部,因此仅作为下次滚动优化的参考。过饱和交叉口群实时信号控制优化的流程如图1所示。

图1 交叉口群实时信号控制优化流程图Fig.1 Flow chart of real-time traffic control optimization method for intersection group
2 线轴结合的相位差优化方法
2.1 相位差优化思路
相位差优化是信号协调控制的重要组成部分,其优化目标为某个复杂函数的最值。过饱和交叉口群进行相位差优化时应根据路径的重要程度依次优化。在包含n个交叉口的交叉口群中,可能存在的相位差个数为(C/r)n-1,C为周期长度(s),r为搜索步长(s),可以看出计算相位差的复杂程度呈n的指数幂增长,需要寻找更高效的优化方法。因此,结合以路径为基础的交叉口群信号控制思想,提出线轴结合法来优化城市道路交叉口群个交叉口之间的相位差。
轴即为关键路径,线即为次关键路径。线轴结合法通过一系列搜索、结合的步骤把路网等价为一个路段。每次结合相当于把一个额外的路段转化为与之前路段相同的路段,以直接利用之前路段所优化的路段流量。其通过“串联”和“并联”组合的形式来优化交通信号控制网络的相位差。“串联”即为以关键交叉口为核心根据关联性依次寻找下一交叉口并合并组合成关键路径,通过合并连接到一个终点交叉口的两个路段的优化函数并选择相应优化目标的最优解来确定最优的相位差。“并联”是在关键路径确定的基础上,并行式地寻找与关键路径相交的次关键路径,通过构建从一个路网中的交叉口延伸出两个路段相位差的二维优化函数来确定两个路段的最优相位差,所选择的相位差必须满足两个优化函数的优化目标。采用先轴后线的顺序,根据车流输入输出关系和路径特征,建立线轴协同控制优化模型,如式(1)所示,其中第一行为轴的相位差计算方法,第二行及以下为与轴相交的多条线在队轴优化结束的基础上进行的相位差计算方法。
(1)
式(1)中:Xi,k为第i个轴的第k个路口周期开始至协调相位开始之前的时间;Yi,k为第i个轴的第k个路口的相位差;ΔT1为旅行时间(第k个路口到第k+1个路口的行驶时间);Xi′,k-1为第i个轴的第k条线的第k-1个路口周期开始至协调相位开始之前的时间;Yi′,k-1为第i个轴的第k条线的第k-1个路口的相位差;ΔT2为旅行时间(第k-1个路口到第k+1个路口的行驶时间)。
建立以车流量权重最大的约束条件,如式(2)所示:
(2)
式(2)中:qjn为j方向上路口n的流量,其中j为车流流向,j=1为正向流向,j=2为反向流向;N为协调路口总数;Qijk为第i个轴的第k个路口j方向上的流量权重,即流量权重越大,车流量越大。
2.2 相位差优化步骤
以一个交叉口群的相位差优化为例,说明线-轴结合法的计算过程。
步骤1:在所优化干线道路的起点位置定义起始交叉口D0。
步骤2:按照以下过程依次组合干线路网上的各个交叉口。
假设D的取值范围是D0~Dn:
(1)令{ΔD}={ΔDj,ΔDj+1,…,ΔDj-1},设第j个交叉口为关键交叉口,相位差优化以第j个交叉口优先级最高。
(2)令{ΔD}={ΔD}∪{ΔDj},其中ΔDj为先前合并过的相位差。
(3)假设每个周期可分为B个时段,每个时段长度为w,设δ=1,2,…,(B-1),通过对每个交叉口当前的相位差和之前结合的相位差增加来建立网络相位差评价模型,如式(3)所示:
(3)
如果w=1 s,则B=C。此时计算整个网络每个δ的评价本质上意味着两条单行道的串联组合包含了双向行驶路段的情况。
(4)选择合适的δ值以取得最好的评价效果,使得{ΔD}←{ΔD}δ。
步骤3:对于孤立系统,指定相位差的调整集合{ΔDj}至特定值以便指定交叉口相位差达到要求。
优化过饱和状态交叉口群的相位差尤其需要考虑下游交叉口通行能力的限制和其他流向汇入关键路径的重转向交通流所形成的交叉口排队,在原有优化方法的基础上引入两个约束,即设计相位差防止交叉口产生溢流现象和绿灯空放现象。
2.2.1 防止溢流现象的相位差设计
为防止溢流现象的产生,调整协调控制的相位差来防止停车冲击波在到达上游交叉口前消散。如图2(a)所示,停车冲击波在上游放行车流同排队车辆相遇产生,向上游交叉口传播。当与离驶冲击波相遇时,停车冲击波消散,车流正常运行。但当消散点经过上游交叉口时,上游交叉口车辆排队便会产生溢流现象。在设计过饱和状态相位差时,通过将原相位差减少Δr,使停车冲击波产生时间减少Δr,从而以确保消散点位于上游交叉口前,如图2(b)所示。假设消散点恰好位于上游交叉口处,应用式(4)计算出相位差的约束。
(4)
式(4)中:ρ为排队长度和路段长度之比;v为离驶冲击波波速;L为相邻交叉口间距;Lv为车辆排队长度;h为车辆的平均慢度。

图2 防止溢流现象的相位差设计Fig.2 Design of phase difference to prevent overflow
2.2.2 防止绿灯空放的相位差设计
绿灯空放现象指交叉口离驶车辆在汇入下游交叉口车队前已经到达下游交叉口的情况。绿灯空放现象一般发生在上游交叉口的车队滞后于理想相位差时。绿灯空放会造成下游交叉口部分绿灯时间变为无效绿灯时间,使其实际通行能力减少,如图3(a)所示。在检测到绿灯空放时,通过调整信号控制的相位差,使上游车队在到达下游交叉口时正好加入下游交叉口放行车队,即可避免绿灯空放现象的产生,如图3(b)所示。防止绿灯空放的最大相位差由式(5)计算。
(5)

图3 防止绿灯空放的相位差设计Fig.3 Difference design for preventing green light from emptying
3 协调控制周期优化方法
交叉口群协调控制周期长度的合适选取是缓解城市交通拥堵很重要的一步,选取的不当会直接导致交叉口发生排队溢流现象的概率大大增加。一般情况下,在稳定的交通流中,周期长度的选取可以通过交叉口各方向单位小时交通量和饱和度等参数确定。而对于过饱和状态交叉口群,协调控制周期长度的选取尤其要考虑各路段之间的车辆蓄存能力及红灯和绿灯时间车辆的到达率等因素。
基于上述考虑,在交通流量较大并且交叉口间距较小时,要避免使用短周期。在选择使用较大周期的情况下,要通过调整相位差减少红灯时间车辆的到达率来提高通行效率。短距离交叉口在交通量较大时还要对周期长度进行必要的约束。因此将下列约束引入周期的计算。
(1)各路口的最小通行能力约束。
(6)
(2)各交叉口的最大通行能力约束。
(7)
(3)各交叉口的最大饱和度约束。
(8)

(9)
式(9)中:j为一个周期内的相位数;yj、y′j为第j相位的流量比和设计流量比;qd为设计交通量;Sd为设计饱和流量。
交叉口群协调交通控制的参考周期长度满足上述条件的周期的最小值,即如式(10)所示:
Cref=min(C1,C2,C3)
(10)
4 仿真实验
由于现实中不可能仅仅为了本案例的研究而调整信号规划,因此使用交通仿真技术来评估所提出的模型性能。在这里,使用Vissim软件来模拟所提出的模型。应用青岛市香港路周边某交叉口群对控制模型和算法的有效性进行评估,该交叉口群范围共包括7个交叉口,获取工作日上午7:00—9:00的2 h数据,包括交通量(所有车型)、现有信号配时参数和交叉口的几何特征,生成交叉口的流向流量图,如图4所示。还收集了现有的车辆延迟时间和各交叉口平均排队长度,以上数据为仿真参数的输入提供了较为丰富的信息。根据文献[9]的方法,确定交叉口群的关键交叉口为E,关键路径为“AWT-BWT-CWT-DWT-EWT”和“EAT-DET-CET-BET-AET”,次关键路径为“ENT-GNT”和“GST-EST”,各进口道车道属性如图5所示。

图4 交叉口E的流量流向图Fig.4 Traffic flow diagram at intersection E
在对控制模型效果进行评价时,对各交叉口的相位相序未做大的调整。在动态仿真算法每个数据更新时间段开始时,使用Vissim中读取路网的实时交通信息,并作为输入变量输入交通控制动态优化算法。算法根据实时交通数据更新下一时段的交通信号配时方案后,将信号配时方案返回到Vissim仿真软件,并转入下一时段的运行,完成Vissim仿真路网构建并运行。在此过程中,以E为关键交叉口,根据交叉口信号周期约束求得实时的周期长度如表1所示。可以看出,在上午7:00—9:00的2 h内采用的模型共生成了44个信号周期,并且周期长度随交通流的变化而变化,相较于现有的分时段定时的信号周期方案具有更好的实时性,如图6所示。

表1 早高峰各约束周期及参考周期取值
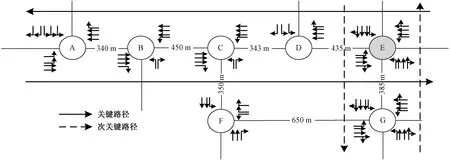
图5 交叉口群示意图Fig.5 Schematic diagram of intersection groups
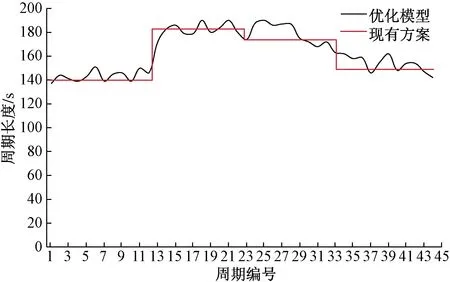
图6 交叉口信号周期优化前后对比Fig.6 Comparison of intersection signal period before and after optimization
在求解相位差过程中,一个非常重要的问题也是采用滚动优化法来实现信号的实时控制,即在一个周期内,一旦得到优化的信号参数(包括周期长度和绿灯时间),要根据新的信号配时对相位差进行动态搜索,并根据交叉口群相位差优化的防止溢出和防止绿灯空放约束来求解,如表2所示,相位差优化范围如图7所示。

表2 两种约束下的相位差计算值

图7 各交叉口的相位差搜索范围Fig.7 Phase difference search range of each intersection
5 模型评价
采用交叉口车辆平均排队长度和总延误两个指标通过交通仿真软件对现有方案和优化方案进行对比,在这里,所有的评价指标都是在早高峰时段,即上午7:00—9:00。得到的结果如表3和表4所示。

表3 各交叉口平均排队长度

表4 各交叉口车辆总延误Table 4 Total vehicle delay at each intersection
6 结论
由仿真评价结果可知,基于线轴结合的过饱和交叉口群信号实时优化方法通过综合考虑防止过饱和状态负面效应的两个约束,求得相位差的优化范围,并在优化范围内搜索最优解,一方面,可以简化计算的过程;另一方面,信号周期的确定还考虑了交叉口的实时最值通行能力和最大饱和度的约束,最终使得高峰时段的各交叉口排队长度和车辆总延误有所减少,一定程度提高了过饱和状态下交叉口群的通行效率,证明优化方法有效可行。
猜你喜欢
作文周刊·小学一年级版(2020年40期)2020-10-19 04:42:20
自动化学报(2017年4期)2017-06-15 20:28:55
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:32
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24 02:47:36
中国房地产业(2016年2期)2016-03-01 01:25:37
系统工程学报(2015年3期)2015-02-28 19:54:01
电网与清洁能源(2015年2期)2015-02-28 16:03:08
电测与仪表(2014年22期)2014-04-04 11:55:06
河南科技(2014年14期)2014-02-27 14:12:02
电力工程技术(2012年5期)2012-03-25 10:40:38
