
基于PID自动控制的高精度温控电路设计与实现
2020-02-03 05:47郑本昌
电子技术与软件工程 2020年11期
郑本昌
(中国运载火箭技术研究院研究发展部 北京市 100076)
1 引言
半导体激光器由于其体积小、效率高、寿命长等优点,在激光光通讯、光存储、激光高速印刷、光信息处理、光传感等诸多方面得到广泛而至关重要的应用[1-3]。但从物理机制上讲,温度变化影响了半导体激光器的这一美妙应用,由于激活介质的能带中等效费米能级随温度变化,使得增益曲线漂移从而造成频率漂移,甚至导致跳模,另外,温度变化引起激光器腔长变化,也将导致频率变化[4-5]。由此可见,控制温度使其稳定是一项重要而且必不可少的任务。
针对半导体激光器控温,国内外进行了大量的研究。PID (Proportional Integral Derivative)控制作为控制工程中技术成熟,应用广泛的一种控制策略,能够在一定程度上合理的解决动态稳定性和静态增益之间的矛盾,因此吸引了众多研究人员的兴趣。贺春贵[6]等人分析了PI 参数对温度控制稳定性的影响及温度控制的短期稳定性,卢燕[7]等采用DSP 数字信号处理芯片的方式实现了±0.1°控温精度的温控系统,鲍健[8]等人实现了±0.05°的高精度二极管激光温度控制器。
本文针对某激光器控温精度±0.1°控温需求,设计了基于PID自动控制的高精度温控电路,有机结合模拟控制与数字控制,利用数字电路的大范围和高精度和模拟电路的高稳定性,实现高精度控温。
2 总体方案设计
根据某半导体激光器总体要求指标,单一的模拟电路和数字电路均难以实现。基于PID 自动控制的模拟电路控温精度高,但控温范围小的缺点无法避免,数字电路控温范围大,但稳定性又略低,电路实现和程序均相对复杂。本文设计以模拟系统的PID 自动控制作为主要的控温方法和解决途径,再配合数字电路以得到稳定性好,控温范围大,精度高,响应速度快的控温电路。
总体设计思路如图1 所示,以模拟电路做PID 自动温控,输出较小的电压V1保证控温精度和稳定性;同时以数字电路辅助提供偏差电压V2,保证有足够的电流输出满足控高温和低温时需求,两者通过加法电路输出给后续并联反馈电路和功率放大电路,最后实现控温电流的输出。
3 各部分电路系统设计

图1:电路设计方框图

图2:基准电压采样电路
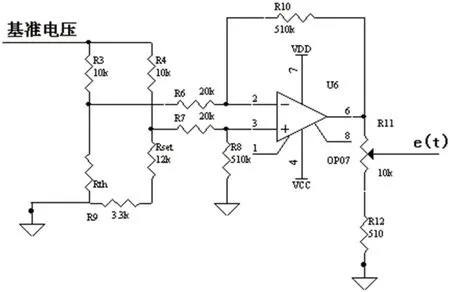
图3:差分比较电路
3.1 基准电压采样电路
考虑到控温电路要求控到0.01mv,所以选用了稳定度达到10-6的LM399,其温度适应范围为0~70 度,温度系数为10-6,具有稳定度高和纹波小的特点。基准电压采样电路如图2 所示。R1 的阻值由LM399 的齐纳二极管ZD 中电流IR 所决定。通过查找LM399特性,当IR 为0.5~10mA 时,其输出的基准电压为6.95V,变化范围为6.6~7.3V。这里取最初通过齐纳二极管的启动电流为5mV, 以利于电压的稳定。


图4:PID 自动控制电路
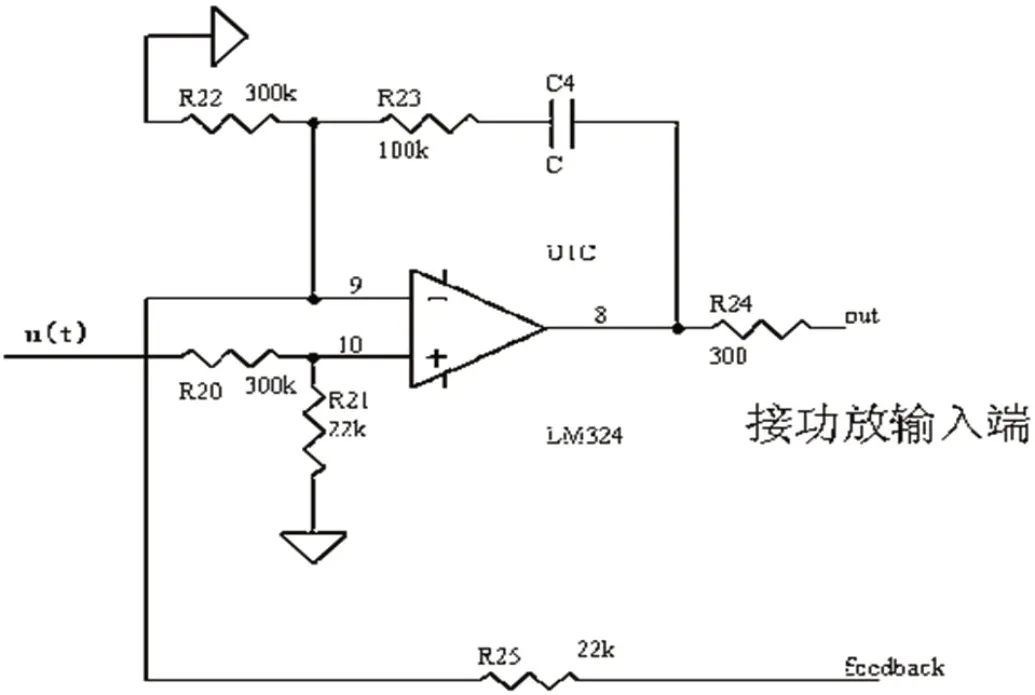
图5:反馈调节电路

图6:功率放大电路

图7:数字偏压与控温关系曲线

表1:用齐格勒—尼柯尔斯整定规则2 确定PID 参数
电路中R1 的阻值为1.5K。
3.2 差分比较电路
差分电路将实际电阻两端电压与代表预置温度的电阻两端电压相比较并相减,随后进行放大,经过分压后得到偏差信号,输入PID 中进行相应控制。
其中差分的放大倍数=R10/R6=R8/R7=25.5。所以

其中R11,R6,R7,R8,R10 的取值对整个电路的效果是有一定的影响的,前级放大相当于后面的比例控制。所以选取过高,使得电路增益过高,电路的稳定性降低,容易产生震荡。如选取过低,无法更好的区别Vreal 和Vset, 影响控温的精度,所以R11 选用了滑动变阻器,可以进行微调。
电路设计如图3 所示。
3.3 PID自动控制电路
自动控制电路如图4 所示,电路的传递函数为:

如表1 所示,采用齐格勒—尼柯尔斯整定规则调整PID 参数,齐格勒—尼柯尔斯整定规则被广泛应用于过程控制系统中,能够[9]在被控对象的动态特性不能精确知道的情况下,实现PID 控制器参数的调整。本文中采用的是齐格勒—尼柯尔斯整定规则第二种形式,首先设TI=∞,TD=0,控制器仅为比例控制作用,增加KP值,从0 到临界值KCR,系统输出第一次出现固定的震荡。如果KP取任何值,系统输出都没有明显的固定震荡。这种方法就不能用。临界增益KCR和相应的周期TCR由实验确定。
先用小电阻将C2,C3 短路,将R14 调至最大值,然后逐步减小R14,同时用示波器监视c(t),当R14 调到某一位置时,观察到c(t)出现震荡,记录震荡周期TCR,通过调整R14 使得KP=0.6 KCR,TD=R16*C2=0.125TCRTI=R18*C3=0.5TCRR16=910K, R18=2.2M, TCR =11s, 通过计算求得C2=1.51uF, c3=2.50uF。
3.4 反馈调节电路
反馈调节电路如图5 所示,提供了闭环系统中的并联反馈回路,它一方面将电压反馈形成了局部的反馈,保证后级调节的稳定性,更为重要的是它改善了系统总体传递函数,增加了一级积分电路,使控温系统由Ⅰ型变为了Ⅱ型,使系统的稳态性能得以改善,同时系统由不稳定变为稳定,同时增加了静态增益,但是,系统的快速性降低,动态性能变差了。

图8:模拟电路的PCB 板3D 俯视图
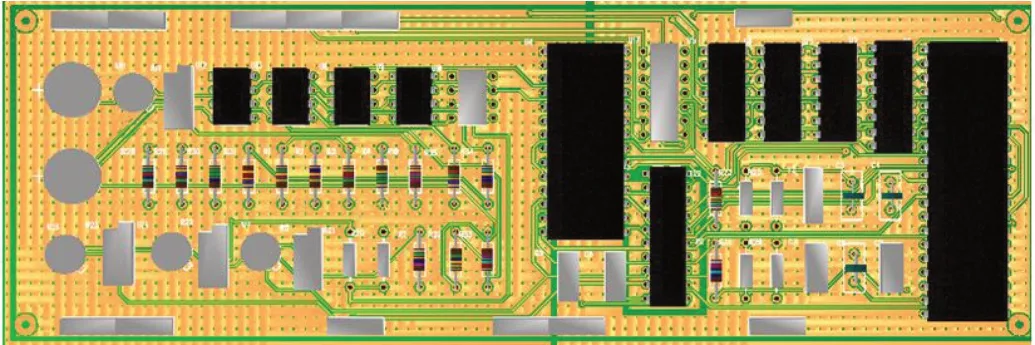
图9:数字电路的PCB 板3D 俯视图

图10:热敏电阻两端电压随时间的变化曲线
3.5 功率放大电路
功率放大电路如图6 所示,由于达林顿管具有功率放大倍数高,效率高,基极电流小的特点,故采用它进行功率放大。对致冷硅进行致冷和加热,有两路组成。当前级输出正电压时,T1 管导通,T2 管截止,此时电流通过Ri2 流入致冷硅,对热沉进行加热。相反,当前级输出负电压时,T2 管导通,T1 管截止,此时电流通过Ri4流出致冷硅,对热沉进行致冷。
3.6 数字偏压电路
控高温和低温时需要很高的电压来保证后级的正常工作,提供足够的电流给致冷硅,以消除外界对激光器的影响,达到系统的热平衡,这就需要数字电路的辅助设计,为PID 的后级提供相应的偏差电压,使模拟部分始终只需要提供很小的电压,而这部分很小的电压正是电路高稳定性和高精度的保证,离散的数字偏差电压保证了很大的控温范围。其原理如图7 所示。
4 电路实现与测试结果
4.1 电路板制作
考虑到功率放大电路中的达林顿管和大功率电阻都需要散热,所以均固定在一块散热片上,所以一共制做了两块电路板,如图8-9所示。
4.2 测试结果
为测试电路温控性能,在某半导体激光器上搭建了测试平台。如图10 所示为控温电路长时间的采样结果,经过换算,本温控电路的稳定性小于0.001%,响应速度小于两分钟,准确性小于0.02℃,控温范围达到0-50℃。
5 结束语
以PID 自动控制模拟电路为核心,设计了一种面向半导体激光器控温应用的高精度温控电路,并对电路进行了实验测试。测试结果表明,本电路可以满足总体的控温需求,控制性能优于传统的半导体温控方式,具有很好的实用价值和广阔的应用前景。
猜你喜欢
原子与分子物理学报(2020年5期)2020-03-17
电子制作(2019年22期)2020-01-14
电子测试(2018年23期)2018-12-29
电脑与电信(2018年12期)2018-03-23
电脑与电信(2018年11期)2018-02-16
电子制作(2017年1期)2017-05-17
中国新通信(2017年5期)2017-04-13
电子制作(2016年15期)2017-01-15
通信电源技术(2016年4期)2016-04-04
