
基于PLC的智能交通灯系统设计
2020-01-19 06:21:32宁平华缸明义夏兴国
唐山师范学院学报 2019年6期
刘 娟,宁平华,缸明义,夏兴国
基于PLC的智能交通灯系统设计
刘 娟,宁平华,缸明义,夏兴国
(马鞍山职业技术学院 电气工程系,安徽 马鞍山 243000)
为实现交通灯的智能化控制,使用PLC可对交通灯控制算法进行优化。借助通行车辆的数据,运用模糊PID控制算法自动调节红绿灯的时间长短,提高交通控制效率。
PLC控制系统;PID;智能交通灯;梯形图
交通控制系统是一个典型的分布式非线性系统,具有多种信息来源、多传感器的特点,用传统的理论与方法很难进行有效的控制[1]。通过检测路口的车流量,将反馈的数据输入计算机中进行分析,从而智能判定路口的拥挤情况。若路口出现紧急状况该系统要能快速地切换到人工控制模式,实现人工强通控制,这样才能更好地保证路面交通的正常、安全运行[2]。
1 基于PLC智能交通灯总体设计
1.1 通过车辆的检测和系统构建
借助可编程逻辑控制器和传感器[3],判断是否处于工作繁忙状态。
图1以东西方向作为突破口,每当路口有车辆进入时,检测器5和7发生响应,产生2个脉冲并由可编程逻辑控制器反馈到总系统中。设此时等待绿灯车辆的总数为1。若进入路口的车辆继续向前,检测器6和8产生脉冲反馈给系统[4]。设开出路口的车辆总数为1,那么
1(进入总和)—1(驶出总和)=1(东西方向车辆滞留数)。
南北方向同理,可编程逻辑控制器也会通过对检测器脉冲数据的记录从而得到滞留量2。
假设1-2>30,设置东西方向处于繁忙的状态,南北方向设为正常状态。东西方向直行绿灯时间加10 s,东西左转绿灯时间加10 s,南北红灯时间加15 s。
假设1-2<-30,设南北方向处于繁忙状态,东西方向设为正常状态。南北直行绿灯时间加10 s,南北左转绿灯时间加10 s,东西红灯时间加15 s。
若-30<=1-2<=30,则设为正常状态[5]。
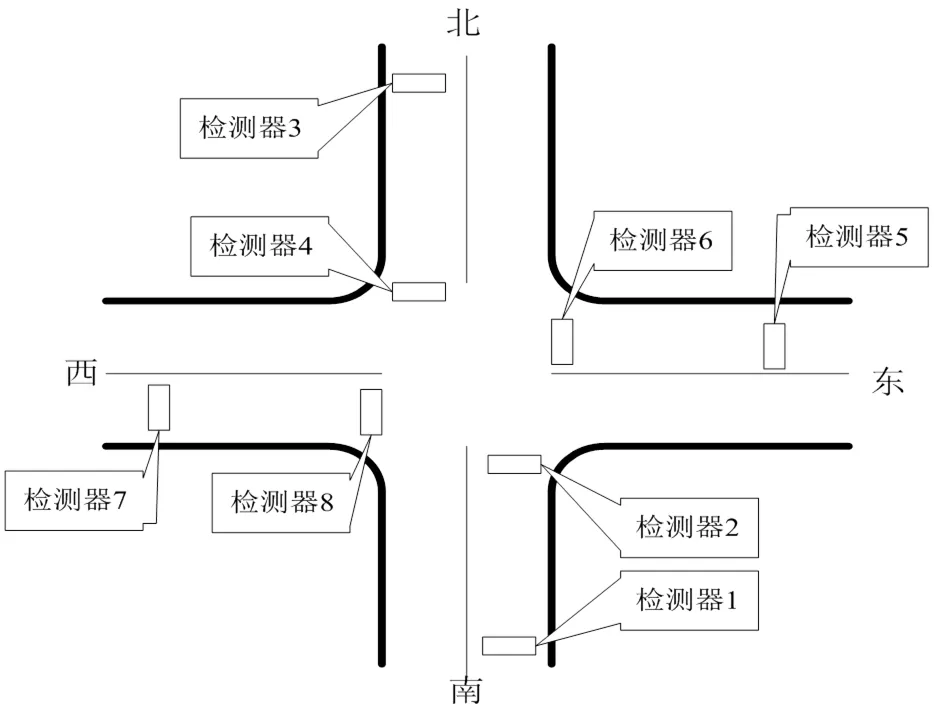
图1 路口传感检测器分布图
以上数据均由可编程逻辑控制器所控制[6]。
1.2 用PLC控制智能交通灯
交通灯处于正常的时候,任何干道上右行方向灯会一直显示绿色,说明此时路口的车辆可以向右行驶通过。十字路口车辆反馈的情况如图2所示,南北路口方向上车辆可以先直行通过,然后依次是向左拐;东西路口方向上的车辆可以先直行通过,然后依次是向左拐。
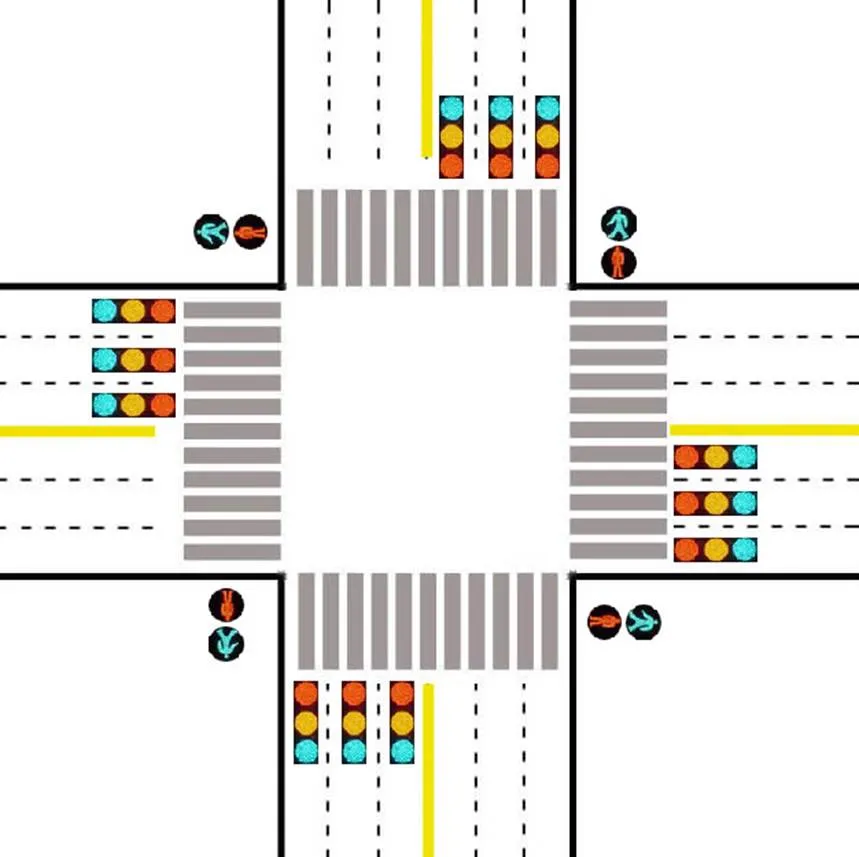
图2 交通灯示意图
1.2.1 传统控制方案
系统由输入接口电路、位置感知传感器、PLC、信号灯、电源等组成。车辆放行的依次顺序为南、东、西、北,如图2所示。按绿灯指示方向行驶(向左、直行和向右),人行道在南面车辆放行时,东面人行道放行,依此类推,顺序为东、北、南、西。绿灯的放行时间初始值为30秒,时间结束后绿灯闪三次(1秒一次),黄灯亮2秒,黄灯灭,红灯亮,三秒后黄灯灭,红灯亮。每个方向循环一次90秒。人行道只有绿灯和红灯,由放行车道的绿、红灯并联控制,绿灯结束后,绿灯闪烁三秒后常亮。
1.2.2 优化后的智能控制方案
优化后的智能控制方案是相对两个方向上的直行通过和左行通过同时进行。倘若直行或左行方向上的车辆不是很多(如在10秒内没有一个车通过),则就可以改变为红灯,以减少等待时间,提高路口的通行效率[7]。
如图3所示,如果南边方向没有直行的车辆,可以先让东边方向上的车辆左行通过,南北方向上没有车辆通过时,可以将其变为红色,此时东西方向变为绿色,让东西方向上的车辆先通行,以此类推。
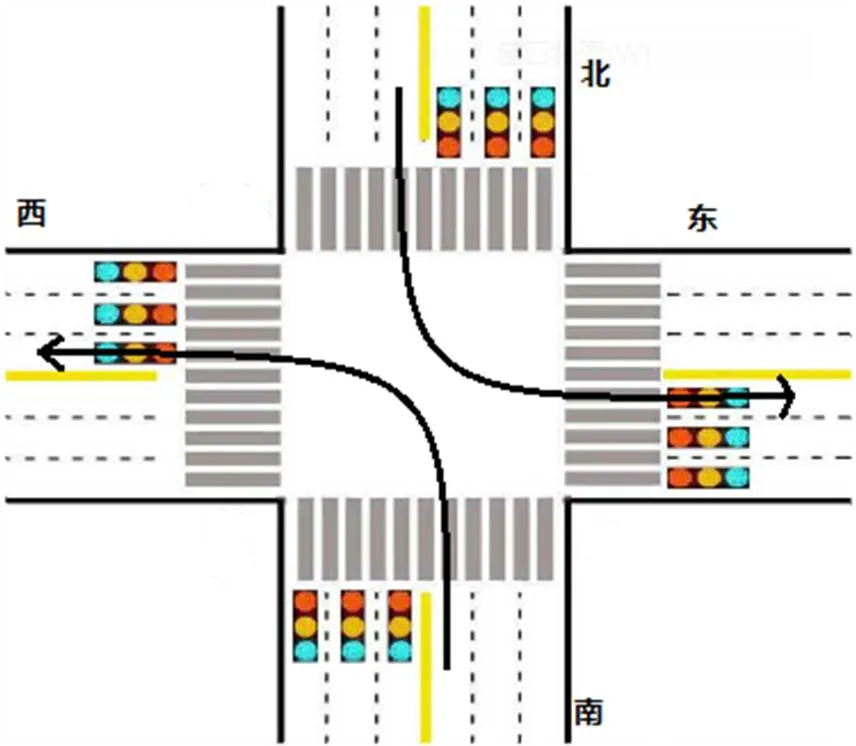
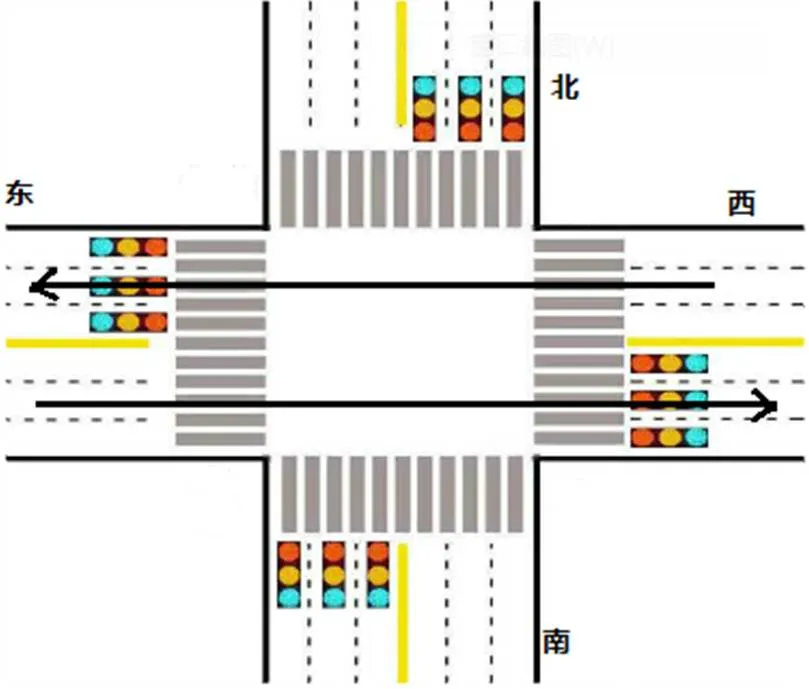
图3 优化后的智能控制方案示意图
检测器产生脉冲信号,反馈给可编程逻辑控制器。可编程逻辑控制器将接收到的脉冲信号进行分析判断。若连续10秒没有收到脉冲信号,就判断无车辆通过,让其他方向上的车辆先行通过,并在对应的信号灯上显示剩余时间,提高准确率,减少闯红灯的现象。
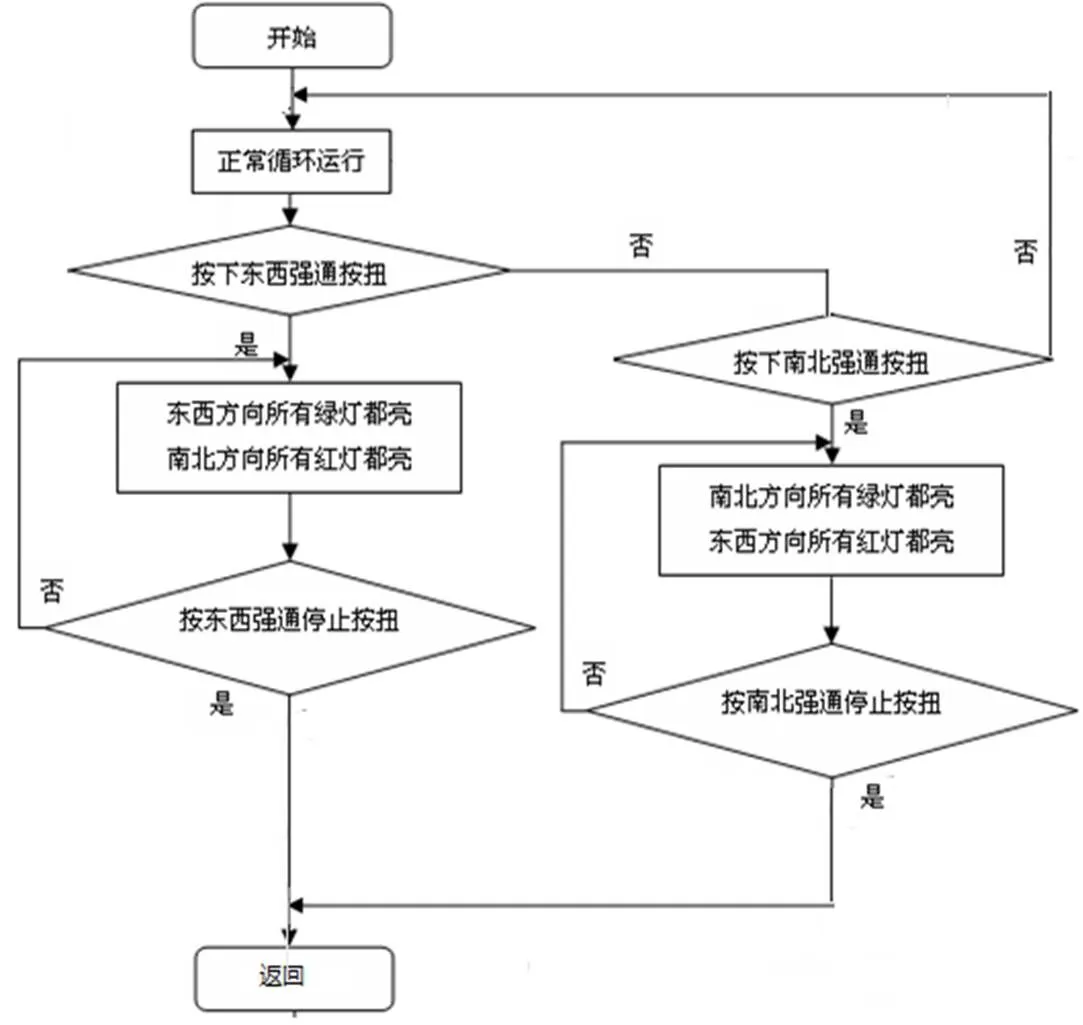
图4 急车强通控制流程图
1.3 急车强通控制方式
急车强通控制是智能交通灯系统设计中不可或缺的[8]。当没有急车时,交通灯会跟往常一样正常的运转;当有急车时,强通开关就会处于打开状态,此时不管先前信号灯是怎样的状态,它会强制让有急车方向上呈现出绿色,让急车通过,减少这条道路上的压力,减少事故的发生[9]。当急车通行过后,又会变成原有的状态。若两个方向先后来急车,则按先后顺序依次响应。若两个方向同时来急车,则先东西,后南北[10]。
急车强通控制的逻辑流程图如图4所示。
2 智能交通灯的软件设计与仿真
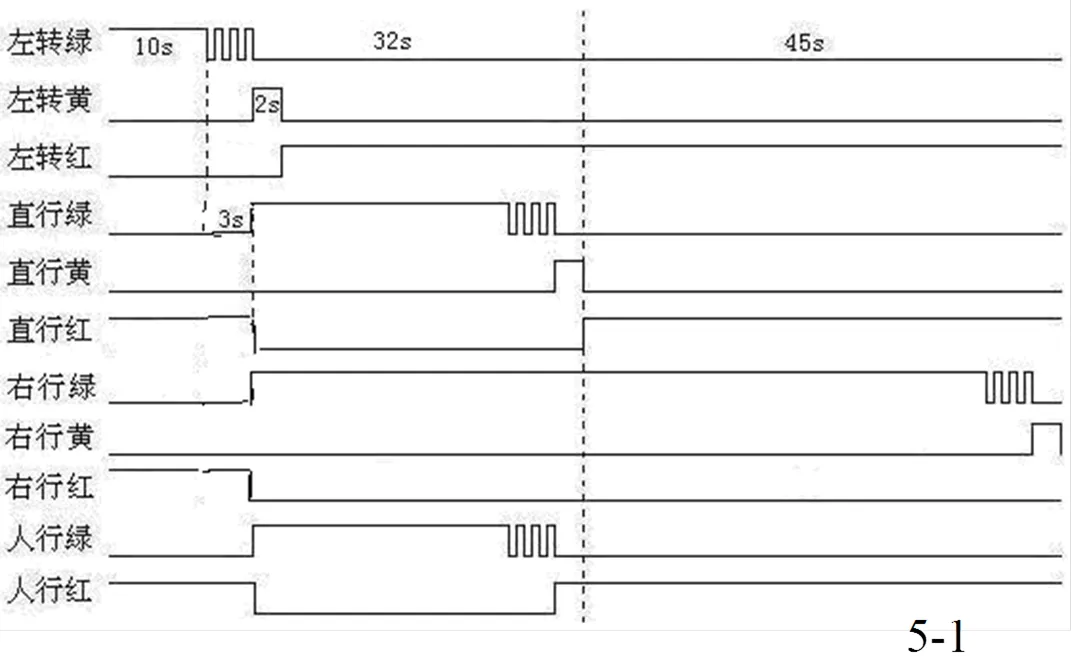
交通灯工作时序图如图5所示。
采用STEP-Mirco/WIN32编程软件和顺序控制指令进行编程[11-14],具体程序如下:
网络一置位初始状态,网络二开始状态S0.0

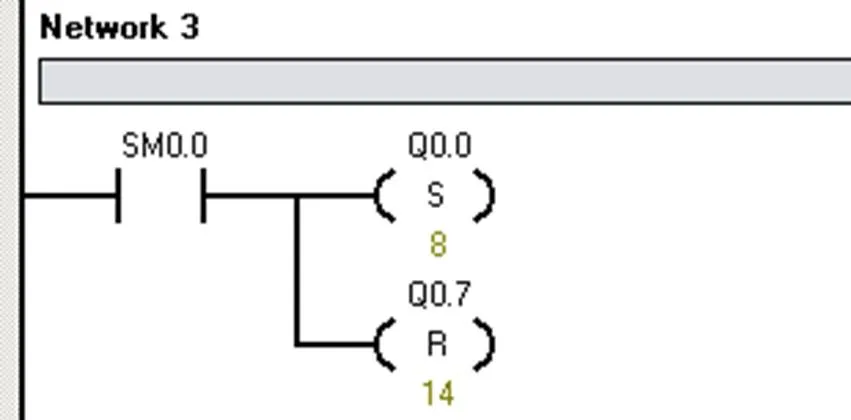
网络三:在状态S0.0中,实现东西、南北方向交通灯以及人行道交通灯的复位和置位。
网络四:若启动按钮有效,分支开始,顺序状态转移到状态S0.1
仿真数据详见表1。
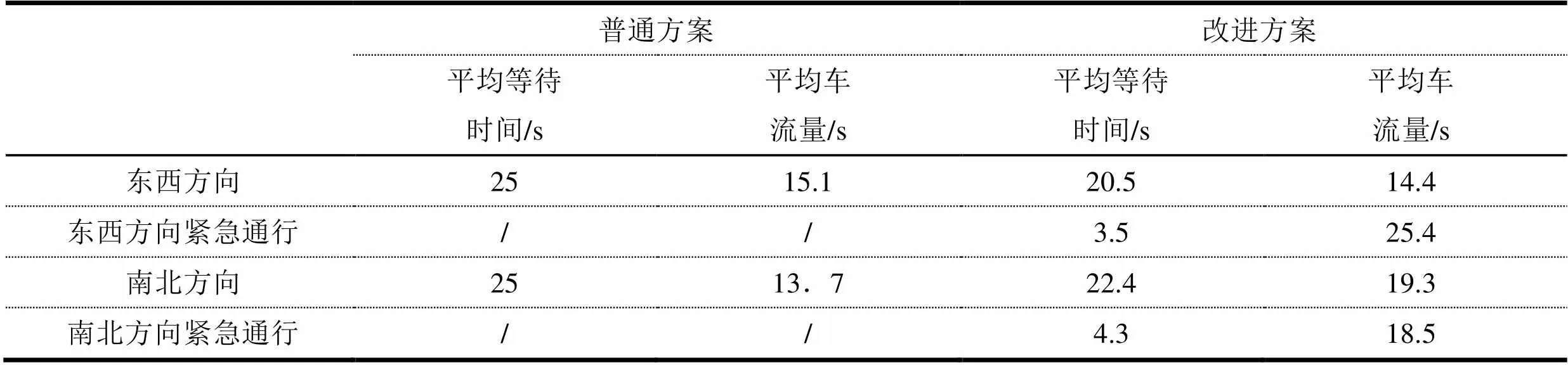
表1 两种控制方案控制效果对比
3 结论
软件仿真结果表明,改进后的信号灯控制方案缩短了车辆平均等待时间,提高了通行效率。
[1] 李艳乐.基于PLC的智能交通灯控制系统设计[J].自动化应用,2018,59(12):16-17.
[2] 陈吹信,蔡嘉弘.智能交通灯控制系统[J].信息技术, 2011,35(18):32-33.
[3] 孙玉芳.一种新型的智能交通灯控制系统[J].黑龙江科技信息,2011,15(24):71-71.
[4] 于泉.城市交通信号控制基础[M].北京:冶金工业出版社,2011:67-69.
[5] 韩九强,传感器与检测技术[M].北京:清华大学出版社, 2010:45-47.
[6] 郭雪峰,基于数据融合的短时交通流预测与智能交通信号系统的研究[D].湘潭:湘潭大学,2007:22-25.
[7] 唐小岚,邓焱,杜晓.基于LabWindows/CVI的直线一级倒立摆系统PID控制[J].唐山师范学院学报,2017,39(2):62-64.
[8] 白永鑫.基于汽车行驶速度随动系统的模糊PID控制及仿真[J].唐山师范学院学报,2015,37(5):60-63.
[9] 徐明铭.城市十字路口交通灯控制系统的PLC程序设计[J].福建电脑,2007,23(10):146.
[10] 马军爽,郭耀华,王维.模糊-PID双模控制器在水位控制中的应用[J].唐山师范学院学报,2007,29(5):104-106.
[11] 王兆义.可编程序控制器教程[M].北京:机械工业出版社,2014:78-80.
[12] 李辉.S7-200PLC编程原理与工程实训[M].北京:北京航空航天大学出版2008:48-56.
[13] 郑风翼,图解西门子S7-200PLC入门[M].北京:电子工业出版社,2009:89-95.
[14] Ed Brinksma, Angelika Mader. Verification and optimization of a PLC control schedule[J]. Inter- national Journal on Software Tools for Technology Transfer (STTT), 2002, 4(1): 21-33.
Design of Intelligent Traffic Light System Based on PLC and Improved PID Algorithm
LIU Juan,NING Ping-hua, GANG Ming-yi, XIA Xing-guo
(Department of Electrical Engineering, Maanshan Technical College, Maanshan 243000, China)
In order to realize the intelligent control of traffic lights, the control algorithm of traffic lights is optimized by using PLC. By recording the number of vehicles in the road, we can make good use of PLC to complete the corresponding feedback to the various abnormal conditions in the traffic. According to the number of waiting queue traffic flow, we can automatically adjust the setting time of red street lights. According to the obtained data, PLC uses the fuzzy PID control algorithm to automatically adjust the time length of traffic lights, which can improve the efficiency of traffic control, and can alleviate the problem of urban traffic congestion, so that the system can achieve the optimal control system. By comparison, the intelligent traffic light control system reduces the phenomenon of vehicle detention, thus alleviating the degree of traffic jam.
PLC control system; PID; intelligent traffic light; ladder diagram.
TP273
A
1009-9115(2019)06-0071-04
10.3969/j.issn.1009-9115.2019.06.018
安徽省高校省级自然科学研究重点项目(KJ2016A697)
2019-01-26
2019-05-01
刘娟(1982-),女,山东章丘人,硕士,讲师,研究方向为电气自动化、智能控制。
(责任编辑、校对:田敬军)
猜你喜欢
金桥(2020年11期)2020-12-14 07:52:52
作文周刊·小学一年级版(2020年40期)2020-10-19 04:42:20
电子测试(2018年23期)2018-12-29 11:11:34
文学少年(有声彩绘)(2017年1期)2017-02-14 11:00:47
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24 02:47:36
电子制作(2016年21期)2016-05-17 03:52:44
河南科技(2014年11期)2014-02-27 14:09:57
西南学林(2012年1期)2012-11-12 12:57:46
中国工程咨询(2011年7期)2011-02-16 06:09:04
中国火炬(2010年5期)2010-07-25 07:48:00
