高效航测技术在水库移民安置规划中的应用
2020-01-15 09:00吴启凡
水力发电 2019年10期
吴启凡,余 琳,杨 洲,徐 静
(中国电建集团成都勘测设计研究院有限公司,四川 成都 610072)
0 引 言
水库移民安置规划工作涉及安置点选择、安置范围划定、安置区用地分析等多方面内容,这就要求移民安置规划、管理等部门对安置区进行详细的土地测绘分析与地上物测量研究。水库移民安置任务重、规模大、时间紧,对测绘精度和效率提出了更高的要求,新技术、新方法的应用成为水库移民安置规划工作顺利展开的有效途径之一。目前,无人机航测技术逐渐趋于完善,其在多个行业测绘工作中的应用逐渐普及;但是在测量效率提升、自动识别校准等方面依然需要进一步优化研究。尤其是在移民安置区域测绘工作中,既需要完成地形、地貌的测绘工作,又需要完成建筑物、构筑物的识别工作,并降低两者之间的相互影响[1]。RTK坐标校准、手工数据录入等传统的人工干预方式,很大程度上降低了无人机航测效率高的优势,研究如何运用无人机自动识别算法,完成移民安置规划区测绘任务,成为水库移民安置规划区域测绘工作的重点[2]。
1 航测数据收集校准
1.1 路径规划
无人机航测精度在无人机稳定性、无人机航拍镜头分辨率、航测天气等因素相同的情况下,主要受航拍网络加密程度影响。在拍摄点位数量相同的情况下,航拍网络密度主要受无人机航测路径规划方式的影响。在航测路径总里程相同的情况下,航测路径的无效重复越低,整体的有效覆盖率越高;在时间周期允许的情况下,提高无人机航拍影像的重叠覆盖率,有利于提高无人机测绘成果的精度[3-4]。如图1所示,无人机航测路径分布较好的情况下,待测绘区域的成像效率也相对较高,其航拍影像具体重叠覆盖情况见图2。
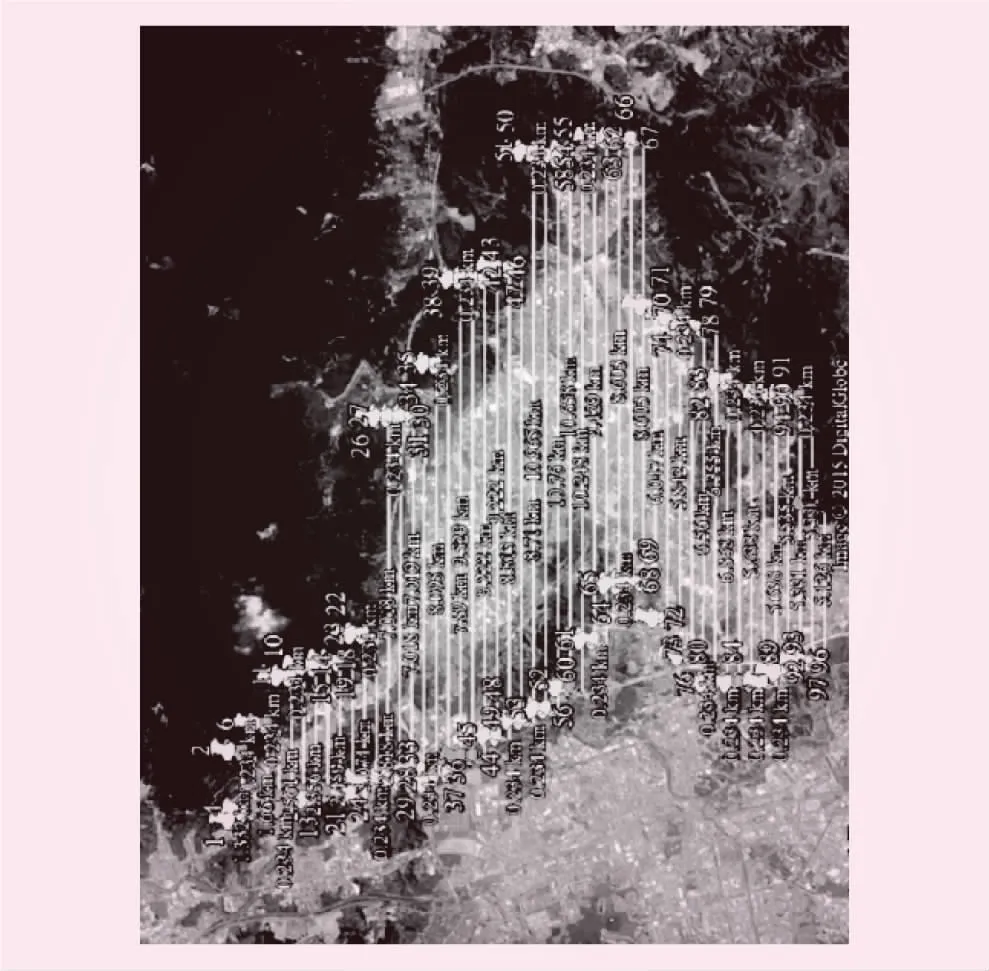
图1 无人机航测路径规划
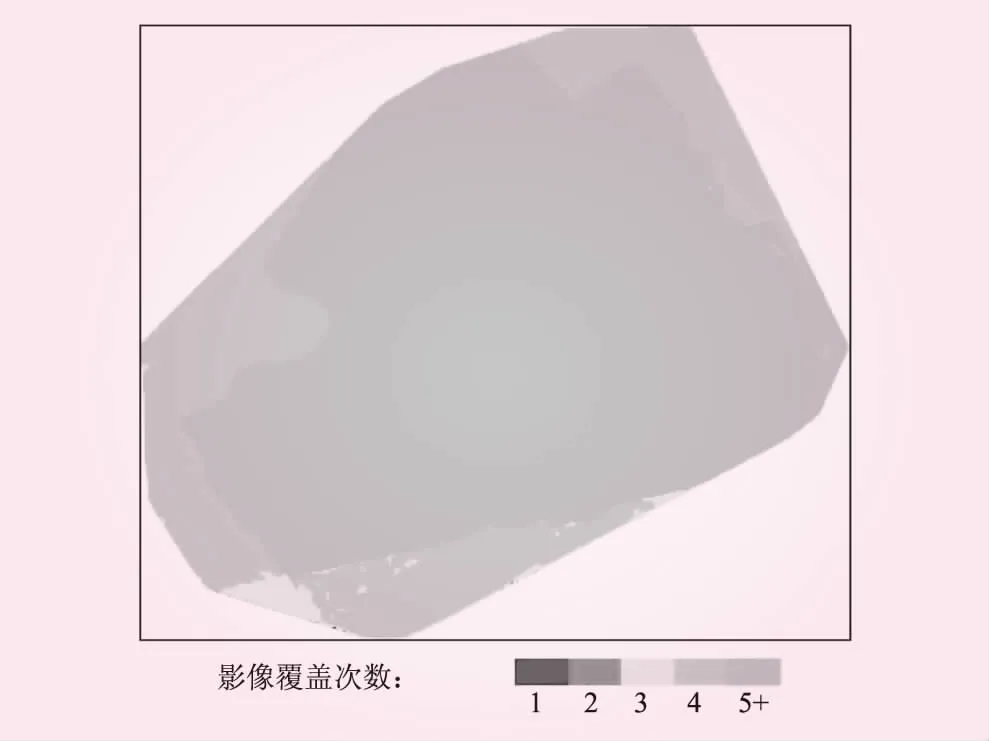
图2 航测影像重叠次数示意
根据图2分析知,本次航测效果较好,核心区域影像重叠次数均在5次以上,周边影像重叠次数在4次左右,在该规划路径下的整体航测效果相对较好。
1.2 规划区控制点校准
无人机航测模型在不同的地形地貌、气候条件影响下,将会产生不同的误差,通过控制点位对移民规划区航测模型进行整体校准,可以保证移民规划区坐标的相对准确性;同时具有较高的校准效率。无人机航测工作的基础控制点位一般为4个,待测区域周边选取3个点位以控制航测影像的坐标影响范围;航测区域中间选取一个,以控制航测影像的扭曲变形,不同测绘内容可根据待测区域形状、区域内地形地貌特征、地上物密集程度等具体情况适当增加控制点数量。本文所选取的水库移民安置规划案例待测面积相对较小,故仅选取4个控制点位[5-6](见图3)。通过对航测区域进行地理信息复核,在图3中无人机航测位置与控制点位置几乎重合。为进一步识别其误差,我们将该4个点位控制的区域连接成基础图形,以便于具体分析。
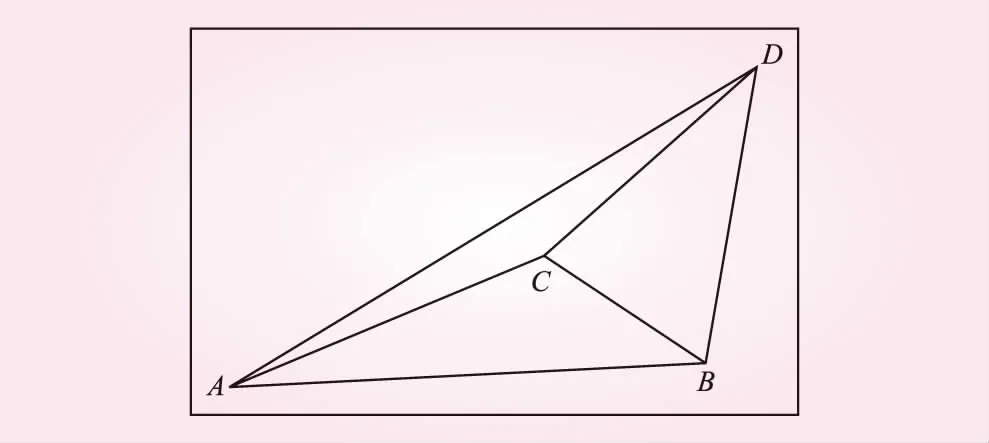
图3 控制点位示意
根据图3,无人机航测位置与控制点位置所控制的区域的误差得以显现,产生误差的点位主要是A、B两点,根据实地调研情况,这两个点的航测位置坡度较陡,航测成果易产生误差。通过控制点校准,可以很好地降低特殊位置的误差对总体成果的影响。
2 高效识别算法
在水库移民安置规划区域测绘过程中,需要识别规划区地形地貌、建筑物、构筑物等,以便在规划过程中充分利用原有地形、原有建筑物,在无法利用原有地形、原有建筑物的情况下,根据航测成果具体分析,对规划区域用地类型进行合理分类,对不同用地区域内的规划内容进行合理布局[7]。因此,需要对水库移民安置规划区域的地形地貌、建筑物、构筑物等进行分类测绘。传统的无人机航测手段无法对地上建筑、植被等进行识别,对于建筑物、构筑物与地面接触的位置往往采用最小二乘法进行平滑处理;但实际情况是,地上建筑物与地面的接触面属于突变面,这样就造成了无人机航测模型与规划区实际情况的偏差[8]。传统的解决方式是人工干预法,通过人工手段,对每一个建筑的边界进行校核与修正,但是对于水库移民安置规划项目,规划范围大、涉及地上物结构多样,人工干预效率相对较低[9],将严重影响水库移民安置规划区域基底资料的收集整理工作。
针对这种情况,本文提出了一种高效的无人机航测区域自动识别算法,主要通过对不同高程下的建筑物、构筑物截面面积,判断建筑物、构筑物的基本形态结构,其算法的简化流程见图4。
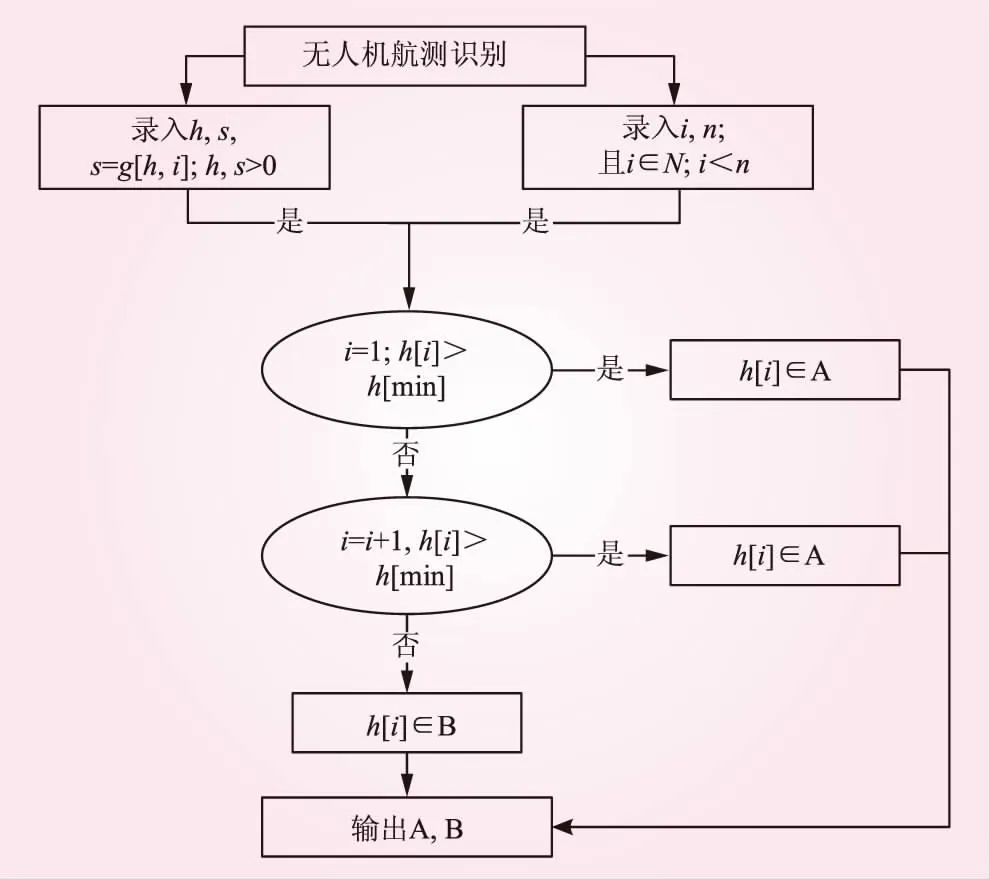
图4 无人机航测识别算法流程
首先,需要对规划区域在水平和竖直两个方向进行量化处理,一方面明确规划区域的面积;另一方面明确规划区域的控制高程;最终将水库移民安置规划范围简化为一个立方体空间。其次,将该立方体空间进行分层剖切,每一层剖面都会将地表、建筑物、构筑物、植被等切割成不同大小、不同形状的面域。通过分析不同面域的面积大小和面积变化情况,即可识别出地表、建筑物、植被等的区别。具体分析如下:
本文中剖面层数用m表示,每个剖切面的元素总数用n表示,不同剖切面的高程用h表示,元素序号用i表示;在高程h所对应的剖面处,对应的各元素剖切面积用s表示,即s=g[h,i]表示高程h剖面处第i个元素的剖切面积;A表示所有地表切面的集合,B表示所有非地表剖面的集合。通过循环计算,可以将剖切面较大的面域统一到地表集合,将剖切面较小的面域统一到非地表集合。
但是,在整个计算过程中,会发生山体顶端切割面域较小而难以区分的问题。这种情况的剖面在m层剖面中占比极低,在识别归类过程中,依然会将该元素自动将其分类到地表集合A中;针对大体积连体建筑切面较大的情况,其m层切面面域面积基本相同,识别算法会将其自动识别为多表面垂直的建筑物,即分类到非地表集合B中。在集合B中,绝大多数航测模型元素都是建筑物,但是也存在植被、车辆、高塔等元素,依然可以通过上述算法进一步分类,将航测元素逐级依次分类。通过无人机自动分类识别,可以有效地对地面、建筑物、植被等进行分类,使航测模型更加清晰准确,更有利于水库移民安置规划工作的顺利开展[9-10]。
3 应用效果分析
为进一步验证无人机高效识别校准技术的应用效果,本文将无人机航测模型进行了对比分析。对比结果显示,没有进行航测元素识别分类的三维航测模型成像效果较差,主要体现在以下三个方面:首先,建筑物模型和地表模型接触部位模糊,接触面扭曲,接触边界不清晰;其次,建筑物表面畸变严重,建筑结构形态、边界模糊;再次,高层建筑与矮层建筑接触部位或同一建筑高度变化部位畸变严重,接触面扭曲,接触边界不清晰。进行了航测元素识别分类的三维航测模型,建筑物模型和地表模型接触部位结构层次清晰,接触面没有发生扭曲,接触边界清晰;建筑物表面没有发生畸变,建筑结构形态、边界清晰可见;高层建筑与矮层建筑的接触部位或同一建筑高度变化部位结构层次清晰,接触面没有发生扭曲,接触边界清晰[11-12]。
由对比分析可知,元素识别分类算法可以有效地对航测元素进行识别与分类,将同一高程下不同面积的元素分别归类;将不同高程下面积相等或面积逐级变化的元素归为一类;最终将整个航测空间中的测绘元素分别建模,使各个航测元素的模型影像互不干扰,成像效果更清晰,与实际情况相符,以便直观反映水库移民安置规划区域的实际情况,为水库移民安置规划工作奠定基础。
4 结论与展望
本文分析显示,提高无人机航测模型精度,一方面要提高无人机航测资料收集的精准度;另一方面要提高无人机航测资料处理的精准度。
提高无人机航测资料收集的精准度要从两个方面着手:一方面是要提高航测影像的有效重叠次数,一般大于5次为宜,以保证航测元素各个角度的影像均被抓取;另一方面要提高无人机航测控制点的坐标精度,一般校核大于等于4个控制点为宜,以保证航测区域整体位置准确,整体形状没有过度扭曲。提高无人机航测资料处理的精准度,主要从提高航测元素的识别分类能力着手,降低不同元素类之间的相互干扰,降低航测元素自身畸变与扭曲,使航测元素独立完整,使整个航测模型成像效果与水库移民安置规划区实际情况相吻合。
本文所述研究成果,一方面可以解决无人机航测成果的精度与无人机航测成果输出效率问题;另一方面还可以将待航测区域的元素进行分类,可以有效识别建筑物、构筑物、植被等地上物。在水库移民安置规划工作中,该成果可以有针对性地利用原有建筑,合理安排征地拆迁与安置补偿内容,科学划定各类规划用地范围,保障水库移民安置规划工作科学、有效的展开[13]。此外,航测元素识别算法可以通过控制高程分割精度、元素筛分面积大小、循环运算次数等改变元素识别的范围与精度,在水库移民安置实际内容与规划内容对比分析、水库移民安置工程量估算等诸多方面依然有很大的研究与应用空间。针对无人机航测精度与广度提高的研究仍需进一步深入,以服务于更多行业;为保障水库移民长治久安,推动水库移民可持续发展,推动各行业高效发展做出贡献。
猜你喜欢
中国水土保持(2022年8期)2022-08-10
铁道建筑技术(2021年4期)2021-07-21
黑龙江水利科技(2020年8期)2021-01-21
安徽农学通报(2020年19期)2020-10-30
河南水利年鉴(2020年0期)2020-06-09
河南水利年鉴(2020年0期)2020-06-09
小学生学习指导(低年级)(2019年9期)2019-09-25
中国房地产业(2018年14期)2018-07-27
大陆桥视野·下(2017年1期)2017-03-09
侨园(2016年8期)2017-01-15