
基于GM-HMM的DCT车辆驾驶员起步意图辨识研究*
2020-01-15 13:23刘海江苏博炜
汽车技术 2020年1期
刘海江 苏博炜
(同济大学,上海 201804)
主题词:DCT起步过程 起步意图 高斯混合隐马尔科夫模型
1 前言
随着双离合自动变速器(Dual Clutch Transmission,DCT)在市场上的不断推广,对DCT控制系统在不同驾驶意图、不同驾驶环境下的适应性等方面研究不充分的弊端逐渐显现。车辆起步作为驾驶舒适性及变速器耐久性的重要考量对象,变速器控制系统的控制品质直接影响了DCT智能控制策略的设计与优化。由此,起步意图的准确辨识成为智能化DCT控制系统的基础。
文献[1]通过构建模糊推理模型,将DCT车辆的油门开度及其变化率作为辨识参数实现对起步意图的识别。文献[2]分析了油门开度及其一、二阶导数的重要程度,同时基于隐马尔科夫模型(Hidden Markov Model,HMM)识别起步意图,准确率达到80%。文献[3]基于车辆动力学,从车速、等效坡度、路面附着系数、起步意图4个方面对起步工况进行识别。文献[4]提出了一种基于BP神经网络识别AMT车辆驾驶员起步意图的方法,将整个起步过程用单一意图表示,准确率超过95%。上述研究均取得了较好的成果,但基于先验知识的起步意图定义难以契合实际起步过程中驾驶员的主观意愿,同时,单一意图的假设也未考虑起步过程中可能出现的意图变化。
针对上述问题,本文通过分析DCT车辆起步过程中的人-车交互过程,确定了影响驾驶员意图表达及主观感受的油门踏板开度、纵向加速度等分析参数,并基于大量起步试验数据对起步意图进行了定义,构建了基于高斯混合隐马尔科夫模型(Gaussian Mixed-Hidden Markov Model,GM-HMM)的起步意图辨识模型,期望在起步过程中,DCT车辆能实时准确地辨识出驾驶员的主观意愿。
2 起步意图分析
严谨的驾驶意图定义是有效意图辨识的基础。为切实合理地对起步意图进行定义,从DCT车辆起步的人-车交互过程出发,确定起步意图分析参数,通过大量实车起步试验数据确定起步意图辨识间隔,并将起步过程划分为多个时段,依据K均值聚类算法对各时段不同起步意图进行界定。
2.1 起步意图分析参数选取
起步意图代表了驾驶员对于车辆起步意愿的强烈程度,驾驶员通过踩踏油门踏板的深度和速度来反映这一意愿,相关的研究也常用油门踏板开度及其变化率来描述。有研究表明,不同驾驶风格的驾驶员在同类操作意图下的油门踏板开度表现相近,不同意图间操作表现差异明显[5]。因此,选取油门踏板开度作为分析参数具有一定的科学性。然而,近来许多研究表明,在起步过程中油门踏板开度变化率存在为零的情况,甚至可以在一段时间内出现矛盾的值,这些实时的波动现象可能会对辨识模型的精度造成影响[4]。车辆起步是人车交互的过程,驾驶员对于车辆的操作会直接反映在整车上,不同起步意图下整车反馈给驾驶员的主观感受不同,驾驶员则将起步意图与其主观感受相匹配,该过程如图1所示。在整车驾驶性研究中,主观感受常通过纵向加速度加以反映。因此,选取油门踏板开度及纵向加速度作为测试分析参数。
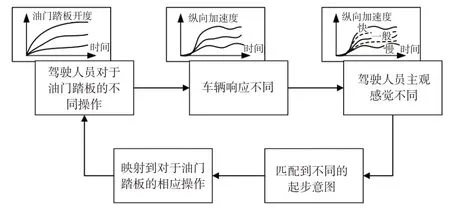
图1 车辆起步人-车交互过程
2.2 试验设计
设计车辆起步试验以确定起步意图与上述参数之间的关系。试验是与国内某主机厂合作实施的,考虑到市区行驶环境下车辆的起步多为平路起步,试验场地为该主机厂专用试车场的高环平直路段。试验车辆配置1.5 L涡轮增压发动机和DCT,测试设备为x/y轴加速度传感器、汽车网络接口DMU-2、行驶记录仪(Vehicle-Recorder)以及上位机,其中,DMU-2通过与之相匹配的数采软件AVL-DRIVE在上位机中实现信号实时查看,上位机为笔记本电脑,行驶记录仪用于记录存储试验数据。油门踏板开度、纵向加速度等信号通过CAN总线及x/y轴加速度传感器获取,采样频率为100 Hz。试验工况参考某主机厂专业驾驶员驾驶经验,将起步目标分为平缓、一般以及紧急起步3个类别,并各进行20次重复试验,选取从触发油门踏板到离合器接合油压稳定时刻数据,共获得60组起步试验数据。
2.3 起步意图的定义
由于起步过程是动态过程,同一起步意图下影响驾驶体验的纵向加速度在不同时段内的分布特性也不相同,为直观地分析加速度变化规律,选取15组起步纵向加速度曲线作为代表,如图2所示。同时,基于驾驶员主观感受的起步意图的界限具有一定的模糊性,考虑到实际控制的可执行性,需对不同时段内的起步意图界限分别进行量化分析。
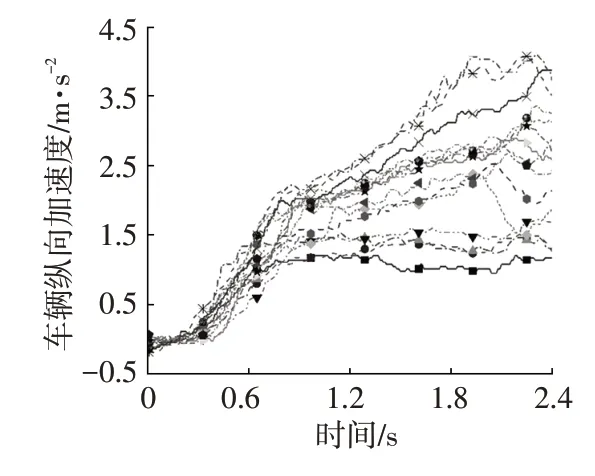
图2 起步过程纵向加速度曲线
考虑到人-车系统的整体性,从DCT车辆起步过程以及驾驶员主观感受两个维度出发,将DCT车辆的起步过程划分为4个阶段[6-7]:消除空行程阶段,此阶段操纵机构控制离合器消除压盘和摩擦片之间的间隙;克服地面阻力阶段,此阶段从离合器压盘和摩擦片开始接触到其传递转矩刚好克服地面静摩擦阻力矩为止,此时离合器到达的位置称为半接合点;离合器半联动阶段,此阶段传递转矩不断增大并具备驱动车辆行驶的能力,直至主、从离合器转速同步;最终接合阶段,主、从离合器转速同步后,离合器继续接合并使压紧力达到峰值以防止打滑。
在上述阶段中,离合器半联动阶段主、从离合器转速差明显且传递转矩不断增加,由此造成的冲击和滑磨对整车驾驶性以及传动系耐久性有显著影响,且在不同起步意图下驾驶员对于冲击度的忍受界限不同,因此,从控制角度来说,需要在该阶段之前完成对驾驶员初期起步的意图辨识,辨识结果作为半联动阶段的控制参数之一,并且考虑到后续可能存在的起步意图变化的情况,应选取适当的辨识周期使得控制系统能够及时、准确地感知并作出相应的调整,以适应驾驶员对于车辆响应的预期。
从图2中可以看出,纵向加速度在触发油门踏板后的0.3 s内变化不大,说明离合器在第0.3 s到达半接合点位置,此后进入半联动阶段。有研究表明[8],驾驶员对于紧急情况的反应时间为0.2~0.4 s,0.3 s的辨识时间间隔能够满足意图变化情况下的辨识精度要求,故辨识周期选取为0.3 s。通过分析不同时段内时长为0.3 s的数据片段中的特征值分布,对表征不同起步意图的数据进行区分。在初始的0.3 s内,由于车辆仍处于静止状态,纵向加速度无法反映驾驶员的初始意图,选取该时段内的油门踏板开度均值作为特征值。分析图2中加速度变化趋势,0.3 s后加速度总体呈现增长趋势,考虑辨识实时性以及辨识结果与主观感受的一致性,将离合器到达半接合点后的起步过程按照0.3 s的辨识间隔划分为7个时段,选取各时段内纵向加速度均值、均方差作为特征值,基于K均值聚类算法对不同起步意图进行界定。不同时段内聚类结果如图3所示,起步意图聚类中心如表1所示,从聚类结果可以看出,不同起步意图间差异较为明显,对起步意图的量化较为合理。
3 起步意图辨识模型
驾驶意图作为驾驶员内在的一种主观意愿,无法直接获取,但正如前文车辆起步人-车交互过程所分析的,驾驶员为表达这种主观意愿对车辆进行的一系列操作是可观察的,这种描述内在隐含状态与外部可观察序列之间联系的结构与HMM相类似,且驾驶员的驾驶行为是随时间变化的动态过程,基于贝叶斯决策理论(Bayesian Decision Theory)的HMM在处理时间序列数据方面表现良好[9-10]。因此,本文基于HMM建立起步意图辨识模型。
3.1 高斯混合隐马尔科夫模型
HMM是一种基于参数表示的用于描述随机过程统计特性的概率模型,可由一个五元组λ表示:

式中,O为一组驾驶员操作的可观察序列集合;I为一组驾驶意图的集合;A为驾驶意图之间的转移概率矩阵;B为驾驶意图为某一状态时相应观察值的观察概率矩阵;π为驾驶员初始意图的分布概率。


图3 不同时段起步意图数据集划分结果

表1 不同时段起步意图聚类中心
根据观察概率分布函数的不同,HMM可分为离散HMM、连续HMM、半连续HMM 3类,由于驾驶员的操作是时间连续的行为,为避免因信号量化造成的信号失真,进而劣化分析结果,采用结合高斯混合的方法构建辨识模型,即GM-HMM,模型的观察概率bj(O)由高斯混合密度函数描述,可表示为:

式中,Cjm、μjm和Ujm分别为当状态为Ij时,第m个混合函数的权重、均值矢量以及协方差矩阵,且Cjm满足为高斯混合度;N(O,μjm,Ujm)为多维高斯概率密度函数。
3.2 GM-HMM学习及概率计算
在起步意图辨识应用中,主要分析HMM中的学习问题和概率计算问题。对于学习问题,通过分析已知的隐含状态和相应的观察序列,对模型参数λ不断调整以使P(O/λ)达到最大,即获取使得该观察序列发生的可能性最大的模型。在本次研究中,隐含状态包括平缓起步、一般起步、紧急起步3种状态,故取N=3,考虑到油门踏板作为驾驶员表达起步意图最直观的操作对象,观察参数序列选取片段内的油门踏板开度时间序列p(t),即O(t)={p(t)}。对于模型参数初始值的选取,考虑到驾驶员起步意图的随机性以及相同意图下操作的相似性,参数π和A的初始值采用均值法选取,参数B的初始值则通过K均值聚类算法基于相应的观察序列集合确定,采用基于期望调节的前向-后向算法(Baum-Welch算法)多次迭代优化模型参数λ,最终训练得到对应8个时段的共计24个GM-HMM。
由于GM-HMM学习采用似然函数作为目标函数,通常训练数据越多,模型精度也越高,但同时也易造成模型过于复杂以及过拟合问题。因此,需要在模型复杂度与模型对数据集的描述能力之间寻求最佳折中。本文采用贝叶斯信息准则(Bayesian Information Criterion,BIC)[11]对影响GM-HMM复杂度的高斯混合度M进行分析:

式中,k为模型参数数量;n为样本数量;ln(L)为对数似然概率。
以2.1 s之后的紧急起步GM-HMM训练为例,BIC分布如图4所示。从图4中可以看出,BIC在M<10时下降趋势明显,对学习模型的计算开销和精确度进行权衡,取M=10,其余模型如是,故不再赘述。
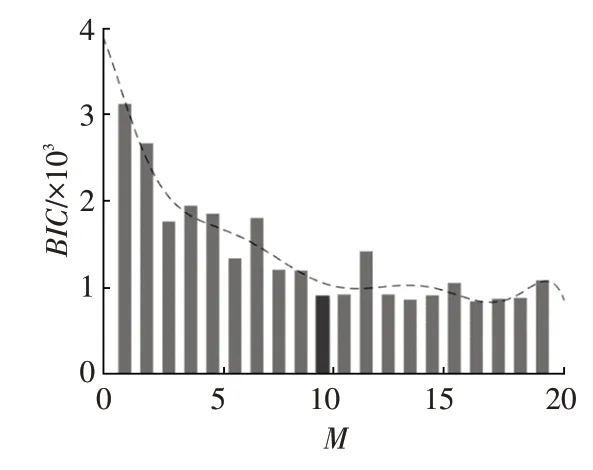
图4 模型训练BIC分布
完成GM-HMM训练后,进行起步意图的辨识,通过求出油门踏板开度观察序列在当前模型参数λ下发生的可能性P(O/λ)(在GM-HMM中用对数似然概率表示),评价观察序列和不同起步意图模型之间的匹配程度,通过比较多个模型中的对数似然概率,将对数似然概率最大的模型作为辨识结果。相应地,针对此概率计算问题,采用前向-后向算法进行计算。
综上,基于GM-HMM的起步意图辨识流程如图5所示。

图5 基于GM-HMM的起步意图辨识流程
4 起步意图的辨识与验证
起步意图辨识模型的构建及验证均通过MATLAB软件实现。按照第1章中意图分析方法对不同起步意图数据进行划分,采用留出法将原始数据集按3∶1分为训练集和测试集,单个样本包含0.3 s内油门踏板开度时间序列及其对应意图标签。样本数量如表2所示。

表2 试验数据
基于上述训练数据完成8个时段共计24个GMHMM的训练,对测试集进行意图辨识,并将辨识结果与测试集的意图标签进行对比以验证起步意图辨识模型的准确率。起步意图辨识结果混淆矩阵如表3所示。
对于DCT控制系统来说,其更侧重于对驾驶员真实意图的预测,选取查全率R为模型辨识性能评估指标:

式中,Nt为正确预测某类别的样本数;Nf为某类别未被识别出的样本数。
计算不同起步意图下的查全率,可得:平缓起步查全率为32/(32+2+0)=94.4%;一般起步查全率为30/(30+1+4)=85.7%;紧急起步查全率为37/(37+0+6)=86.0%;平均查全率达到了88.7%。这表明基于GM-HMM的起步意图辨识模型具有较高的准确率。同时,模型单个片段的平均计算时间为7 ms,具有较好的实时性。
为进一步分析说明模型对于起步意图的契合程度,选取3类起步意图下的起步试验数据输入到模型中进行起步意图辨识,起步试验数据曲线及辨识结果如图6所示,起步意图中,1表示平缓起步,2表示一般起步,3表示紧急起步。
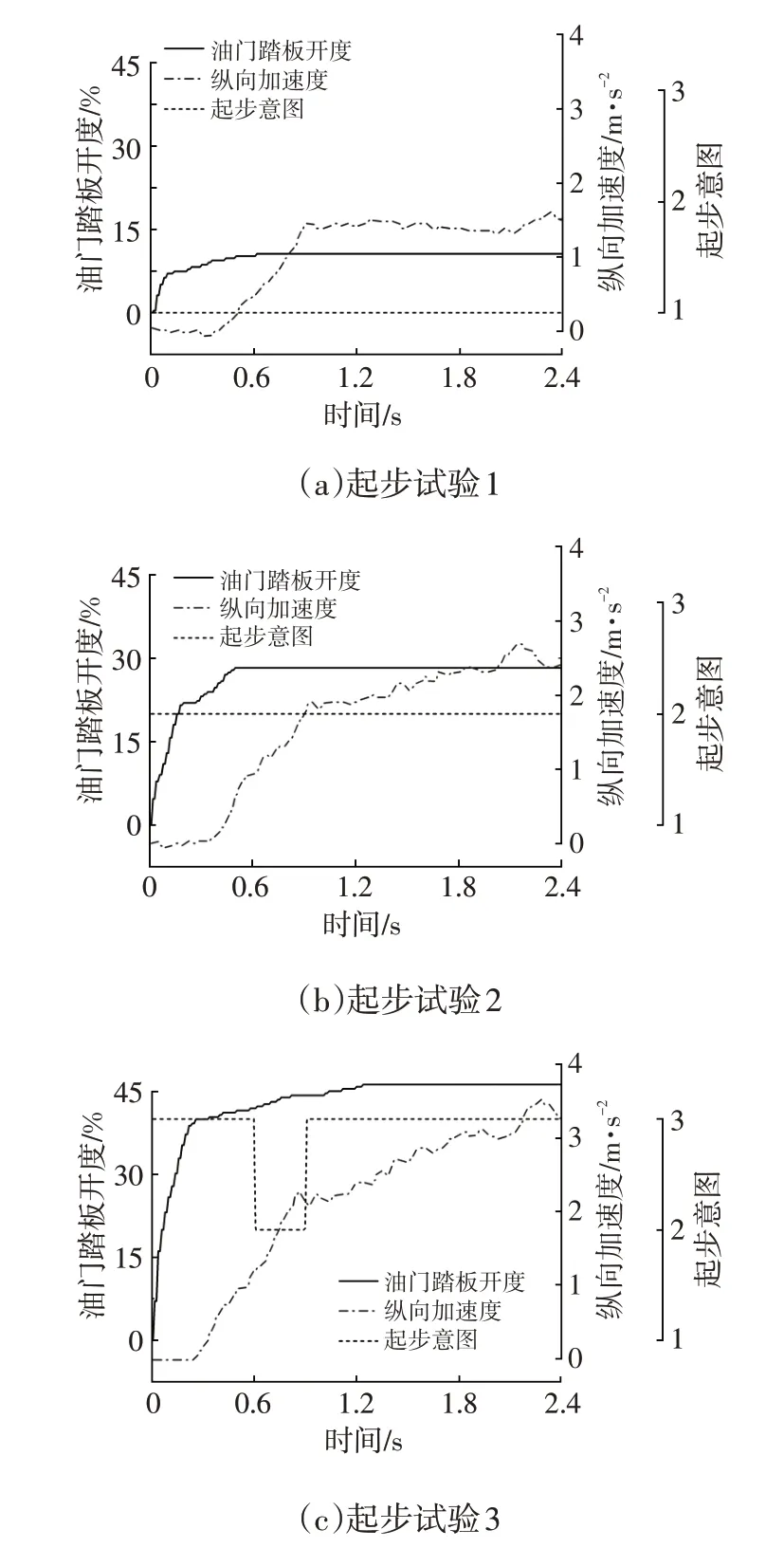
图6 起步试验数据曲线及辨识结果
在起步初始时段(0~0.3 s),3组起步工况下起步意图分别被辨识为平缓起步、一般起步、紧急起步,与主观意图一致。起步意图作为驾驶员主观感受的映射,相近的纵向加速度表现带给驾驶员的感受相似,从图6可以看出,起步意图辨识结果与各时段的纵向加速度表现较为契合,总体上能够较好地描述基于驾驶员主观感受的起步意图与起步操作之间的关系。
5 结束语
本文针对DCT车辆驾驶员起步意图辨识的问题进行了研究,获得以下结果:
a.从DCT车辆起步过程和驾驶员主观感受两个维度出发,确定了0.3 s的辨识间隔,将起步过程划分为8个时段,并采用K均值聚类算法对各时段中不同起步意图进行了量化分析,意图间差异较为明显,对其他驾驶意图的可解释性量化具有一定的参考价值;
b.构建了基于GM-HMM的起步意图辨识模型,通过分析0.3 s内油门踏板开度时间序列在不同模型中的对数似然概率对当前起步意图进行辨识,达到了88.7%的平均查全率以及7 ms的平均单个片段计算时间;
c.本文提出的意图辨识研究方法可应用到其他驾驶意图的辨识分析中,具有较好的泛用性。
在今后的研究工作中,将综合考虑起步意图、行驶环境以及车辆自身状态等因素对于DCT车辆起步控制的影响,进行上述因素的统一辨识以进一步提升DCT控制系统的智能化程度。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
岷峨诗稿(2020年4期)2020-11-18
发电技术(2020年3期)2020-06-29
戏剧之家(2018年21期)2018-10-19
汽车之友(2016年10期)2016-05-16
