
GPS在公路控制网中的应用分析
2020-01-14 07:49钱承军
城市勘测 2019年6期
钱承军
(南京市测绘勘察研究院股份有限公司,江苏 南京 210019)
1 引 言
由于公路属于带状构筑物,传统的公路控制网测量,采用全站仪及水准仪等设备进行观测,控制网要求精度高,工程量较大,效率低且费用高,并且传统公路建设工程的导线布设、横断面及纵断面测量,均需要控制网拥有良好的点位分布及图形结构,要求各控制点之间具备通视条件,这些因素都是公路控制网布设与测量时需要面对的困难。
近年来,全球定位系统(GPS)技术不断发展,定位精度已达毫米级,完全可以用于公路高精度定位测量。采用GPS技术进行首级控制网布设,定位精度高,选点灵活、作业效率高。国内基本上都采用GPS技术进行公路控制网布设,并且取得了可靠的成果[6~14]。笔者结合浦仪公路西段工程,介绍项目方案及过程、数据处理方法及误差分析,从而进一步证实GPS技术在公路控制方面的可靠性。
本项目桥梁段平面控制网等级选用二等,二等GPS控制网点8个,其余公路段按一级公路标准建设,公路段平面控制网等级选用一级,一级GPS控制网点位31个。
2 投影变形估算
在进行平面控制测量之前,选用合适的平面坐标系统,保证平面坐标系下公路投影长度变形值在规定限差之内,对于提高控制测量成果精度,省去烦琐的数据计算,显得至关重要[4]。平面坐标系统下,投影分带位置不应选择在大型构造物处,选择路线平面控制测量坐标系时,应尽量使用国家统一的高斯投影,使测区内投影长度变形值不大于 2.5 cm/km[5]且大型构造物平面控制测量坐标系,其投影长度变形值不应大于 1 cm/km[3]。
浦仪公路西段起于104国道(浦泗路)与205国道(江北大道)交叉的浦泗立交,向东北方向沿规划走廊布设,跨越上坝夹江后与规划和燕路过江通道相交,然后继续向东北延伸,止于南京二桥高速,线路全长约 11.780 km,包含夹江大桥,夹江大桥的主桥跨径为 500 m。项目线路长度较长,跨越了国家3°带投影的39带和40带,投影带边缘区域变形较大,实际运用也会非常不方便,故控制网平面采用高斯-克吕格3°带投影的92南京地方坐标系(新),其中央经线为南京中央子午线,大大减小了投影变形。高斯-克吕格正形投影长度变形计算公式如下:
式中,△s为变形长度增加值;s为参考椭球上两点边长;ym为测距边两端点的平均横坐标;R为地球平均曲率半径。
浦仪公路西段跨江大桥处距离南京中央子午线的距离约为 8 km,带入ym可得△s/s=1/1260000,即每千米变形量△s为 0.8 mm。项目西段最边缘处距离南京中央子午线的距离约为 15 km,带入ym可得△s/s=1/360000,即每千米变形量△s为 2.8 mm。从上述计算可知,浦仪公路西段夹江大桥和最边缘处的投影变形量均小于 1 cm/km,控制网长度变形只需要考虑高斯正形投影就可以了,选用南京92坐标系完全可以满足项目要求。
3 平面控制网的布设
3.1 控制网等级确定
一般公路除了公路段,还会包括隧道段和桥梁段,而公路段、桥梁段和隧道段的平面控制网等级不一样,所以应采用桥梁段和隧道段这些构造物平面控制网与公路段这类路线平面控制网分步布设的方法。应根据公路的平面设计要求及各跨桥梁总长及隧道贯通总长来确定桥梁段及隧道段所采用的平面控制网等级,具体要求如表1所示:
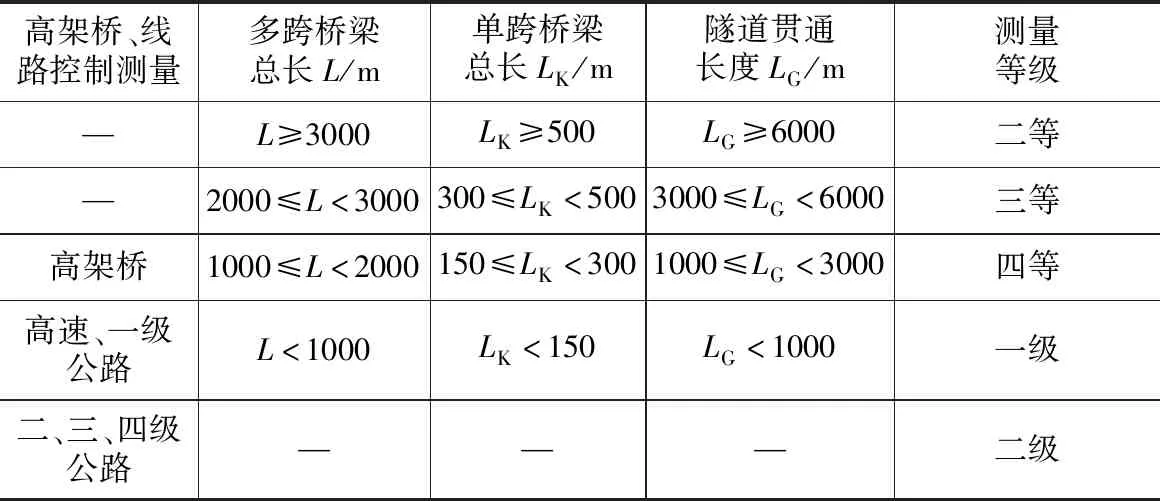
平面控制测量等级选用 表1
浦仪公路西段公路段按一级公路标准建设,公路段平面控制网等级应选用一级,夹江大桥的主桥跨径为 500 m,故桥梁段首级平面控制网等级应选用二等。
3.2 控制网的布设
(1)选点埋石
利用南京市已有最新1∶500地形图,首先在地形图上进行首级控制网的初步设计和点位选择,然后实地踏勘确定点位,并对控制网图进行更新。现场踏勘选点结束后,立即现场埋石。
浦仪公路西段一级GPS控制网主要覆盖八卦洲、江北新区核心区等重点区域,按照甲方要求在实地踏勘选点,一级GPS控制网主要为道路的施工布设,沿线路每隔 300 m~400 m左右埋设一个控制点,点位距道路中心线在 50 m~300 m范围内;控制点在道路一侧连续布设3点~5点后再跳至另一侧,且每个点至少与一个相邻点通视(如图1所示)。

图1 一级控制网图

图2 二等控制网
二等GPS控制网主要为跨江大桥施工布设,整个控制网共布设3个大地四边形,如图2所示。C、D控制点和E、F控制点均布设在夹江两岸第二道加固江堤上,各点离跨江大桥主轴线的距离大于400 m,A、B点和G、H点分别布设在两岸第二道大堤背水面,各点距离第二道江堤大于400 m,距离主轴线大于 200 m,保证控制点能够长期保存。二等控制点两点之间的距离均大于 300 m,每个控制点至少有一个通视方向。二等点位埋设均采用现场浇灌强制观测墩的形式进行,钢管埋深 10 m(如图3所示)。

图3 主桥平面控制网强制观测墩图
(2)GPS布网作业
一级GPS控制网共有点位34个,其中起算点3个,包括C级网点“八卦洲南”“高新医院”和“三道湾”。观测以6台Trimble双频GPS接收机采用静态观测方法进行作业,全网共观测5天,14个测段,数据采样间隔为15秒。
二等GPS控制网共有点位11个,其中起算点3个,包括南京CORS基准站“城建档案”“六合八百”和“栖霞靖安”。二等GPS网观测以8台Trimble双频GPS接收机采用静态观测方法进行作业,全网共观测4天,6个测段,数据采样间隔为10秒。
本次GPS网采用以边连接形式为主,点连接为辅的方法,进行观测,确保每个点有2条以上观测基线相连接。每次同步观测过程中注意卫星信号情况和数据存储情况。当存储出现异常时及时延长同步观测时间。当天静态观测的外业记录表及时整理和保存,并进行基线解算和点位误差解算等,对点位精度超限的控制点进行梳理,查找原因,第二天根据需要调整观测计划,及时进行重测或补测。
4 GPS数据处理
GPS控制网利用TGO软件进行数据下载,基线解算和最后平差是在Ashtech Solutions软件中完成。对精度较差或不合格的基线进行分析,参照卫星残差图,对不合格基线提高卫星高度角,并适当调整信号不好的测站的起止历元的位置,对噪声比较大的卫星或信号质量较差的卫星观测时段予以屏蔽,从而提高基线解算质量。在平差前对构网的基线进行同步环、异步环闭合差和重复基线的检核,选择合适的基线向量构网。GPS控制网中,复测基线的测量较差、同步环各坐标分量及全长闭合差及异步闭合环或附合路线坐标闭合差应满足《全球定位系统(GPS)测量规范》中规定的精度指标,GPS控制网平差流程图如图4所示。
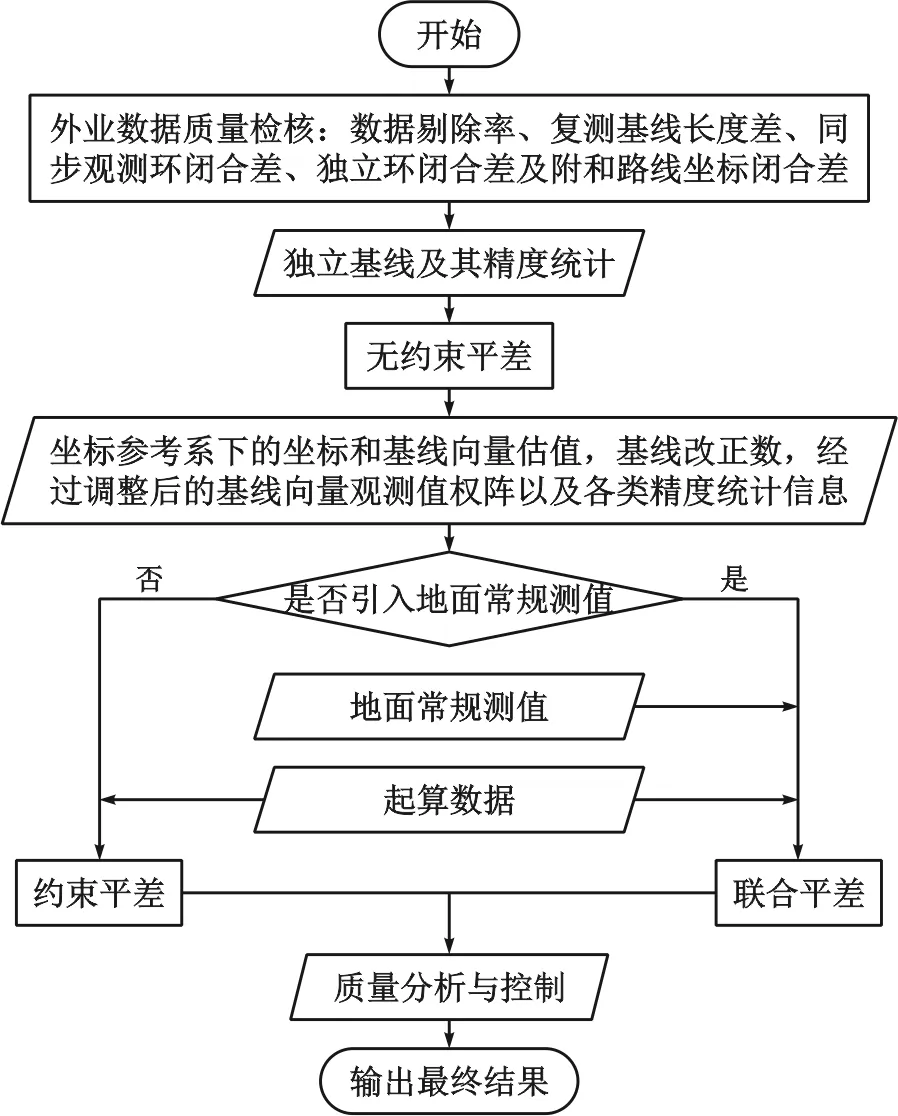
图4 GPS控制网平差流程图
浦仪公路西段项目进行一级网平差计算的起算数据为南京市3个C级网点(“高新医院”“八卦洲南”和“三道湾”)的CGCS2000坐标系下的三维坐标,对一级网95条基线进行三维无约束平差及约束平差,解算得到高精度的31个点位成果。平差后检测了44个闭合环,X方向最大误差为 0.015 m,Y方向最大误差为 0.024 m,Z方向最大误差为 0.024 m。进行二等网平差计算的起算数据为南京市3个CORS基准站(“城建档案”“六合八百”和“栖霞靖安”)的CGCS2000坐标系下的三维坐标,对二等网的30条基线进行三维无约束平差及约束平差,解算得到8个高精度二等控制点点位。平差后检测了14个闭合环,X方向最大误差为 0.013 m,Y方向最大误差为 0.023 m,Z方向最大误差为 0.022 m。
利用本公司南京坐标转换系统软件将解算出的各GPS控制点在CGCS2000坐标系下的坐标转换到1954年北京坐标系、92南京地方坐标系以及2008南京地方坐标系。
5 控制网精度评定
(1)基线相对精度
一级GPS控制网基线中最弱边(F01—0-2988)相对中误差为1/48478;二等网平差基线中最弱边(JJXD-JJXB)相对中误差为1/437602。
(2)点位中误差
一级GPS控制网平差后最弱点点位中误差为 12.0 mm;二等控制网最弱点点位中误差为 9.2 mm。
(3)闭合环相对精度
检查一级控制网闭合环40个,优于100万的占31.8%,优于50万小于100万的占15.9%,大于10万的占52.3%;检查二等控制网闭合环14个,优于500万的占29%,优于100万小于500万的占50%,大于100万的占21%。
从控制网解算结果可以看出一级和二等控制网最弱点点位中误差均小于 50 mm,一级GPS控制网基线最弱边相对中误差小于1/20000,二等控制网基线最弱边相对中误差小于1/100000,均满足《公路勘测规范》中的要求,说明本项目各等级GPS控制网精度很高。
6 总结及建议
6.1 结论
采用GPS测量技术对公路控制网实施测量,其精度高于传统的经纬仪、全站仪等设备测量的结果,各站点的观测时间短于传统测量方式。GPS测量与站点间的可视性无关,避免了传统测量方式的频繁搬站,使公路控制网测量的控制点的选点灵活方便,降低劳动强度。公路是长条带状构筑物,视距差,遮挡严重,不利于工程的测量,而GPS控制网的布网方式灵活,可以选择导线式、网络式、星形等各种方式,极大地改善作业环境,提高了公路测量的作业效率和测量精度。
本项目选择高斯平面直角坐标为未知参数的约束平差,以平面二维基线向量为观测值的无约束和约束平差相结合的方式处理数据,平差结果的整体性好,特别适用于长距离、大范围的GPS控制网的平差计算,非常适用于公路控制网的测量。
6.2 建议
(1)对于公路控制网的不同部分,根据构造物大小和主跨选用不同等级控制网,需求不同,布网灵活,根据需要做好控制网的图形设计[15];
(2)当天数据当天处理,随时根据观测情况进行补测或重测,补测或重测时可以根据前一天控制点信号情况增加观测时间以弥补选点条件不佳的缺点,从而提高点位精度。
(3)当测站周围地形条件对卫星信号遮挡较严重时,可以适时增大截止高度角以减少多路径效应及大气延迟误差的影响。
(4)不同等级公路控制网平差解算前要对所使用的已知控制点的坐标统一性和稳定性进行验证,以保证解算出来的坐标所在系统的一致性。
(5)GPS网最弱边相对中误差并不是直接观测的基线精度,而是最弱间接边的精度要求,为保证控制网中各相邻点之间具有很高的相对精度,对距离较近的控制点进行同步观测,以获得直接观测基线。
(6)GPS测量会受到电磁波、厚大云层、高大建筑物及大面积水域对信号产生的干扰,具有自身的局限性,因此,在实际测量中,应该将GPS测量与全站仪等传统测量方式相结合,可以提高控制网整体精度。
猜你喜欢
全球定位系统(2021年1期)2021-03-26
科学(2020年5期)2020-11-26
航天制造技术(2020年4期)2020-09-11
中国惯性技术学报(2019年3期)2019-10-15
制造技术与机床(2018年12期)2018-12-23
证券市场红周刊(2018年37期)2018-05-14
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
舰船电子对抗(2016年5期)2016-12-13
浙江大学学报(工学版)(2016年10期)2016-06-05
