
EDL渲染在点云测图中的应用
2020-01-08 09:14:02
智能城市 2019年24期
(中煤航测遥感集团有限公司技术发展研究院,陕西西安 710199)
激光雷达(Light Detection and Ranging LiDAR)能够快速地获取高精度、大密度的三维点数据[1]。移动激光雷达系统有车载、机载、船载人工背负等多种工作平台。使用移动激光雷达系统进行测量,可有效解决传统作业方式效率低,受地形环境等因素限制较大的情况[2]。随着科技的进步,快速获取高精度点云地形数据促使裸眼3D测图的提出。
目前市场上常用的裸眼3D测图方式有:基于三维模型的裸眼3D测图、基于高精度点云的裸眼3D测图以及基于点云和三维模型叠加的裸眼3D测图方式。三维模型测图的优势是:模型数据具有丰富的纹理信息,结合其三维地理坐标,即可采集出DLG矢量数据。但三维模型测图最大的劣势在于,高精度三维模型数据的获取。三维模型数据需要航拍影像数据,外业实测控制点数据,经过空三加密以及密集匹配等一系列烦琐的工艺操作才可以获取,其精度依赖于空三的精度以及密集匹配的精度,在数据生成过程中任何一步精度不满足,都可能导致最后的模型数据精度不满足测图要求。然而,三维模型测图的劣势,正是点云测图的优势。随着激光LiDAR技术的发展,能够快速地获取高精度的满足测图要求的点云数据。相较于传统测绘,直接采用点云测图的数据采集模式具有明显优势。在点云数据满足精度要求的情况下,不需要空三加密,不需要立体眼镜、手轮脚盘,普通作用人员只需要一台普通笔记本就可以进行高精度测图。相对于传统测绘方式,节省了80%以上的野外采集、调绘工作,缩短了成图周期,大幅度降低了生产成本;相较于模型测图,省去了空三加密和密集匹配以及控制点量测等一系列步骤,提高了生产效率。
然而点云测图的劣势在于直接获取的点云数据缺少丰富的纹理信息。尤其是单纯依靠高精度高密度的点云数据实现大比例尺全要素地物采集时,由于点云数据缺少纹理信息,很难进行全要素的地物区采集。在裸眼3D测图中,有人采用点云数据和模型数据叠加的方式测图。DLG采集矢量的精度由点云数据保证,采集的地物要素区分辅助模型数据。此方法要求同时获取两种测图数据源,增加了生成成本。因此在点云测图时,如何利用点云现有优势,在点云渲染过程中增强地物的轮廓信息,增强点云数据的地物要素区分,提高点点云测图的效率,是本文中的研究重点。
1 点云测图
采用点云数据进行裸眼3D测图的DLG生成流程如图1所示。DLG采集、编辑、质检和传统测绘并无不同,最大的不同在于,DLG的采编是直接在渲染后的点云数据上实现的。因此点云数据的显示是点云测图的关键。

图1 点云测图数据生成流程图
2 点云的显示方式
点云数据包含丰富的信息特征,如XYZ坐标信息、类别、强度、回波次数等信息。在目前的点云测图软件中,常用的点云数据显示方式有高程显示、类别显示、回波次数显示、强度特征显示等。任何一种显示方式,都是根据具体的规则,计算每个点云的颜色信息。以点云按强度显示为例:首先统计加载点云数据的最大、最小强度值,将点云最小、最大强度值分别对应灰度值0和255,在按灰度渲染加载的点云数据时,根据每一个点云的强度信息,线性对应一个灰度值,计算得到每个点的颜色信息。
在具体点云测图过程中,多种显示方式切换用于采集不同地物要素。
3 EDL渲染
EDL(Eye-Dome-Lighting)渲染技术[3]可以使用opengl实现,也可以使用OSG实现[4]。
EDL是一种不需要法线,沿着轮廓创建光照表面和框架的方法。EDL渲染的关键是:在点云渲染过程中,实时计算当前视口点云的深度纹理,在获取正确的深度纹理后,结合当前点云显示方式下点云的颜色纹理,采用顶点着色器、片元着色器以及渲染到纹理技术[5],即可实现点云在当前显示方式下的EDL渲染效果。开启EDL渲染后,会在地物的轮廓部分形成阴影效果。EDL一般与可用的点云显示方式配合使用,增强显示点云地物的轮廓特征信息。
4 渲染结果对比
本文中使用的点云测图软件为西安煤航技术发展研究院自主开发的点云测图软件MapCube。本文的实验数据选取的是城区的点云。选择了点云常用的高程显示和类别显示。图2(a)、图3(a)均表示没有EDL渲染的点云显示效果,由图可见,除了房子、树木,很多地物要素是很难区分出来的;图2(b)、图3(b)均表示开启EDL渲染后的点云显示效果,由图可见,可识别的地物要素的种类明显增多。在点云测图过程中,有助于提高点云的测图效率。

图2 点云在高程模式下的EDL渲染前后对比图
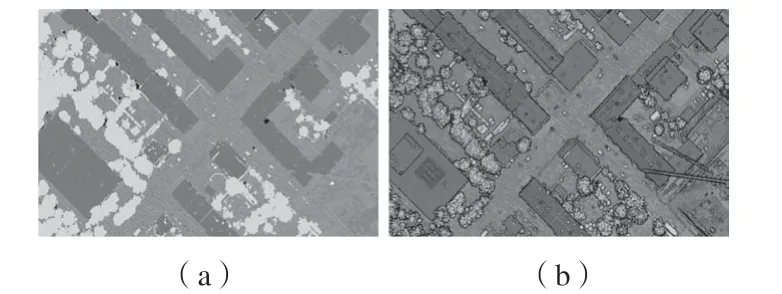
图3 点云在类别模式下的EDL渲染前后对比图
5 结语
裸眼3D测图是测绘发展的必然产物。点云的优势在于快速地获取高精度的地形数据,缺点就是纹理信息的缺失。EDL渲染,增强了地物的轮廓信息,丰富了点云数据可见的地物类别,能够提高点云测图的效率。
猜你喜欢
当代水产(2020年4期)2020-06-16 03:23:30
软件(2020年3期)2020-04-20 01:45:18
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:00
现代园艺(2017年22期)2018-01-19 05:07:22
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
河北书画研究(2017年1期)2017-08-22 12:11:50
Coco薇(2017年8期)2017-08-03 15:23:38
光学精密工程(2016年3期)2016-11-07 09:03:34
测绘科学与工程(2016年6期)2016-04-17 06:51:25
Coco薇(2015年5期)2016-03-29 23:22:15
