ADCP外接GNSS罗经仪测流系统安装偏移量测定
2020-01-02 01:11
人民长江 2019年12期
(长江水利委员会水文局 长江口水文水资源勘测局,上海 200136)
声学多普勒流速剖面仪(ADCP, Acoustic Doppler Current Profiler)利用多普勒频移原理获得沿深度方向的垂线流速,通过船载走航测量,将流速测量从“点测量”扩展到“面获取”,较彻底地解决了大江大河流量测验的难题。ADCP获取的是相对其自身的流速,需要借助底跟踪获得船速和内置磁罗经获取的方位分解计算出大地坐标系的绝对流速[1-2]。但当测量遇到流动底质或底沙运动(动底)时,底跟踪失效;而当采用铁质测量船时,会导致ADCP内置磁罗经失效或获得的方位带有较大误差。ADCP底跟踪和内置磁罗经只要有一项参数存在偏差,就会影响ADCP流速测量精度,甚至测不到绝对基准的流速数据,限制了ADCP的应用。为消除上述问题影响,近年来借助外部GNSS罗经仪,为测量船提供绝对的船速和方位,为ADCP实测绝对流速提供外部参考基准[3]。
由于ADCP、GNSS罗经仪都有各自定义的坐标系,在水文测船上ADCP外接GNSS罗经仪所构成的测流系统,必须保证ADCP、GNSS罗经仪与船体三者的坐标系完全一致[4],才能利用GNSS罗经仪提供的坐标、方位和速度数据计算ADCP的实测流速。由于设备的安装存在姿态和方位的随机不确定性,加上GNSS天线要求对空开阔、周边无微波信号干扰和多路径干扰,在测船上,GNSS罗经仪的定位天线一般不能直接安装在ADCP正上方,会产生相对于ADCP的平面位置偏差。GNSS罗经仪的罗经指向与测船中轴线不平行,导致GNSS罗经仪与船体坐标系的偏差;安装ADCP时,其内部坐标系的纵轴和测船的中轴线也不严格平行,导致ADCP与船体坐标系的偏差;ADCP、GNSS罗经仪与船体中轴三轴相互不平行,导致坐标系统不统一,因而会造成流速流向误差甚至错误。实际工作中,常常采用“目测法”使得ADCP和GNSS罗经与船体轴线大致平行,强制将GNSS罗经安装在测船中轴平行线上,往往不利于GNSS罗经获取最佳的观测精度,影响到ADCP系统的测验精度。安装偏差是客观存在的,这一问题一直困扰着该项技术的精测应用。通过研究和多次试验验证,解决了ADCP外接GNSS罗经仪的测流系统的4项安装偏移量的测定问题。在ADCP数据采集软件里加入4项安装偏移量[5],该系统能避免动底和船体磁场的影响,提高了对不同测流环境的适应性,也提高了ADCP的流速测量精度[6]。
1 ADCP测流系统及安装偏差
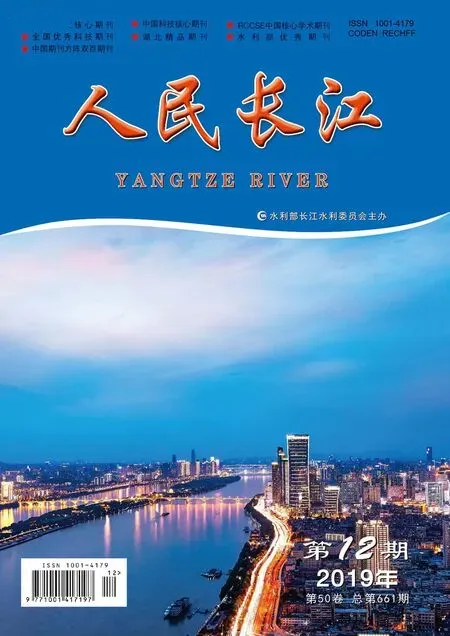
船载ADCP测流系统由ADCP流速仪、GNSS罗经和计算机数据采集系统组成,涉及的坐标系主要包括船体坐标系、GNSS罗经坐标系和ADCP坐标系,各坐标系如图1所示。
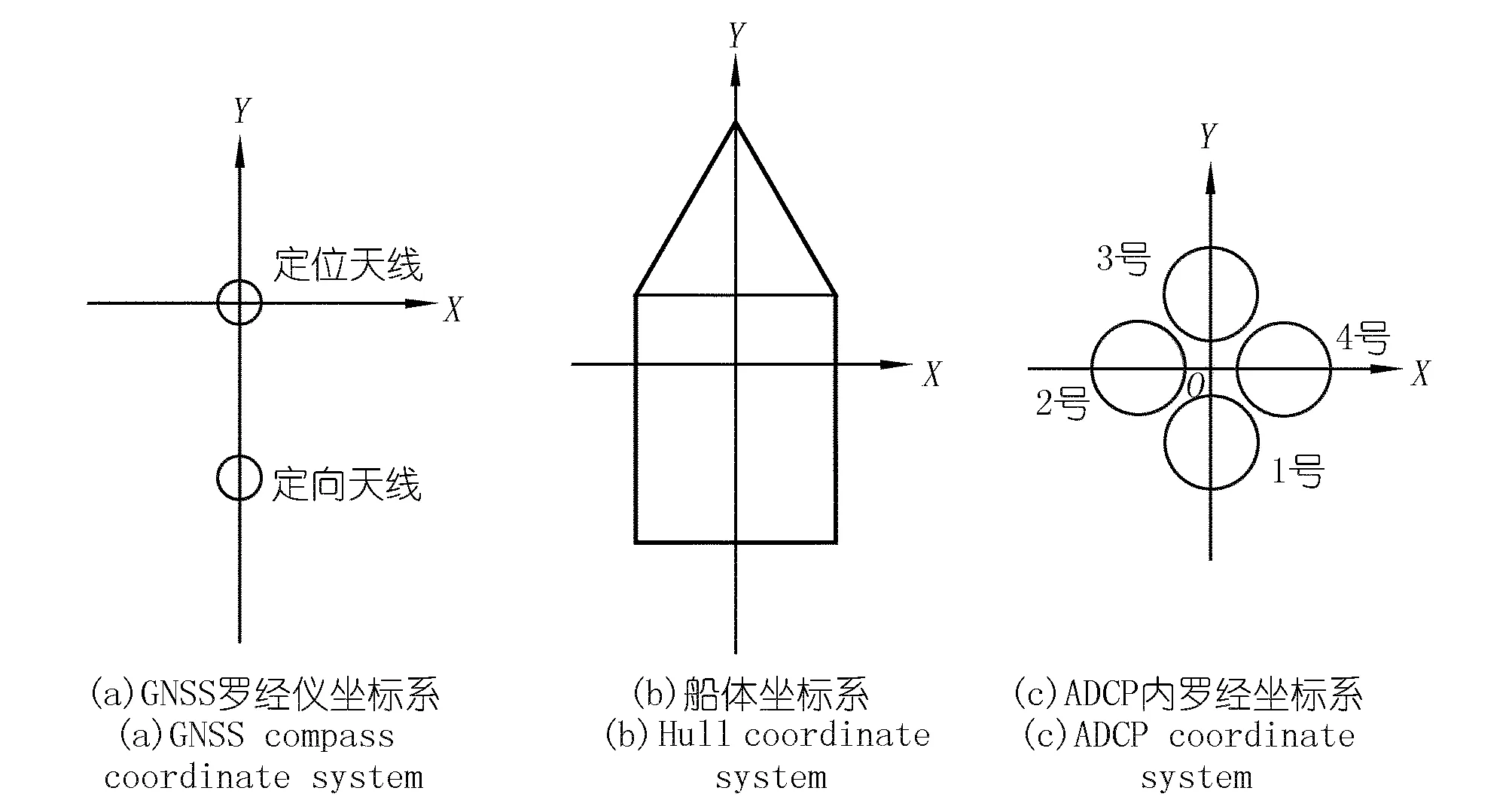
图1 GNSS罗经坐标系、船体坐标系和ADCP坐标系Fig.1 GNSS compass coordinate system, hull coordinate system and ADCP coordinate system
GNSS罗经由两个GNSS接收天线和一台接收机组成。其中一个GNSS天线是定位天线,接收机给出该天线所在位置的坐标和速度;另一个GNSS天线为定向天线,与定位天线构成基线,接收机计算该基线向量方位角,即GNSS罗经方位。为了方便计算GNSS定位天线改算到ADCP平面的偏移量,将GNSS罗经的定位天线作为GNSS罗经仪的坐标原点,GNSS定向天线指向定位天线的方向为罗经仪坐标系的纵轴(Y轴),顺时针旋转90°即坐标系横轴(X轴)。GNSS罗经坐标系的定义如图1(a)所示。船体坐标系以船重心为坐标原点,船体中轴线为纵轴(Y轴),顺时针旋转90°为横轴(X轴),船体坐标系的定义如图1(b)所示。
ADCP有4个声柱,在水平投影面上互成90°。为了将ADCP实测流速用地理坐标系表示,在仪器内部安装了磁罗经,并以仪器中心至3号探头的水平线作为罗经的指标线来表达ADCP的水平姿态[5],定义了ADCP的方位起算轴线,则在图1(c)中,ADCP坐标系原点位于仪器中心,1,3号构成Y轴,2,4号构成X轴,Z轴与X-O-Y面正交且与ADCP仪器轴线重合并向上。ADCP探测Y轴的磁北方位,并借助测验位置的磁偏角对磁北方位修正,如果ADCP外接罗经,则外接罗经代替内部磁罗经[7]。
如前言所述,为了解决ADCP底跟踪失败的问题,避免ADCP内部罗经受干扰磁场影响而导致罗经错误,ADCP外接GNSS罗经被证实是有效的解决方案。为了计算绝对流速,ADCP数据采集及回放软件都提供了相对于底跟踪、GNSS通用NMEA 0183数据格式的位置数据GGA和速度数据VTG参考的算法[8]。在没有河床底部走沙的条件下,采用这3个参考基准计算的流速的大小和方向应该是一致的,只有ADCP、GNSS罗经仪和船体3个平面坐标系互相平行,则GNSS罗经提供的方位也即船体轴向方位和ADCP换能器轴向方位,才满足外部罗经替代ADCP内部罗经的要求;只有GNSS的位置坐标和速度与ADCP完全一致,才能用GGA或VTG代替ADCP底跟踪船速。
实际安装时,因为ADCP和GNSS罗经仪都有各自最优的安装位置,必然导致ADCP坐标纵轴、GNSS罗经仪纵轴与船体坐标纵轴三者互不平行。在测船上一般将ADCP安装在测船中部的一侧船舷外或特制的安装井里,要求3号探头(Beam 3)朝向船艏并力求1~3号连线(ADCP的Y轴)与船轴线平行,以保证ADCP平面坐标系与与船体坐标系平行[9],实际安装因只能依靠经验目测,所以必然存在不平行的问题。GNSS罗经天线要求安装在对空开阔、远离雷达和甚高频的位置,更好地接受卫星信号,降低周边对卫星信号的干扰。另外,为了提高GNSS罗经的定向精度,其定位和定向天线的间距不应小于1.0 m,这些因素也制约了GNSS罗经仪与船体的坐标轴的平行需求,另外GNSS罗经仪定位天线一般不能直接安装在ADCP正上方,直接用GNSS的位置坐标代替ADCP的位置坐标就存在偏差,当采用GNSS的位置和速度参考计算流速时,在转弯测段还会影响流速的精度[10]。因为存在安装偏差,若直接利用各设备测量的坐标和方位计算流速,必然会给绝对流速的计算带来较大影响,因此必须探测这些偏差,并消除其影响。
2 安装偏差的探测
2.1 获取ADCP测流系统含有安装偏差的数据
在测船合适的位置安装好ADCP和GNSS罗经后,需要测量各设备的安装偏移量。为了探测ADCP、GNSS罗经坐标系的纵轴与船体中轴线的偏角,先将ADCP偏置参数设置中各项安装偏差均设置为零,选择一段长约300~500 m顺流或逆流或流速远小于测船航速、横风较小、不影响测船航行姿态的河段,测船沿该段直线航行,在航行过程中保持艏向一致,保证船体中轴线与GNSS记录的航迹线平行,记录ADCP原始数据*.PD0、GNSS罗经的定位数据*_GPS.TXT和定向数据*_EH.TXT。
当GNSS罗经的定位天线不能安装在ADCP正上方时,需要量取ADCP、GNSS定位天线、定向天线构成的三角形在水平面上的三边长度,ADCP至GNSS定位天线的水平距离记为AG、ADCP至GNSS定向天线的水平距离记为AH、GNSS定位天线至GNSS定向天线的水平距离记为GH,单位为m,并确定ADCP在H→G连续的左边还是右边,见图2。

图2 ADCP(A)、GNSS定位天线(G)和定向天线(H)布置关系Fig.2 Arrangement relationship of ADCP (A), GNSS positioning antenna (G) and directional antenna (H)
2.2 ADCP的底跟踪轨迹与船体中轴线不平行偏角计算
ADCP底跟踪轨迹就是ADCP通过底脉冲信号探测的单元位移标量与加载给ADCP的内部或外部罗经合成的单元位移矢量的累计连线。当采用外部罗经时,ADCP内部坐标系的参考方位就是外部罗经的瞬时值,底跟踪轨迹就是ADCP坐标系加载外部罗经后取得单元轨迹矢量的首尾连接线。GNSS的轨迹也即测船移动航迹。由于ADCP、GNSS罗经与船体坐标系三者不一致,导致底跟踪线与GNSS轨迹线不平行,见图3。需要通过安装偏差探测数据计算该偏角,为ADCP测量提供真实方位。
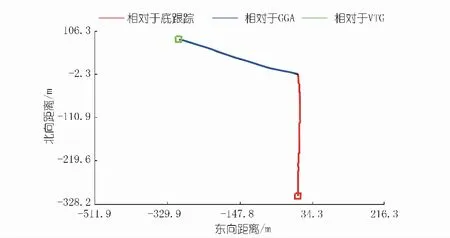
图3 外部罗经安装偏差改正前ADCP航迹线Fig.3 ADCP trace before external compass installation deviation correction
采用第2.1节方法获取直线段航行数据后,回放*.PD0,分别记录“相对于底跟踪”的F_B和“相对于GGA”参考的“航迹方向”F_G,则ADCP底跟踪线轨迹与船体中轴线不平行偏差θ为
θ=F_G-F_B
(1)
式中,θ是ADCP底跟踪线与船中轴线的夹角,F_B是ADCP采用底跟踪的航迹线的方位角,F_G是ADCP记录的GGA航迹线的方位角。
也可以直接查看数据采集软件里的GC-BC表单,GC-BC角度值也即偏角θ。
2.3 GNSS罗经在船体坐标系的方位角计算
根据第2.1节方法,在船载ADCP测流系统直线航行的记录文件*_GPS.TXT里,取直线起点和终点坐标,计算GGA航迹线所在位置的真子午线的方位角F_GGA,再由*_EH.TXT记录数据里每一个历元的罗经值,计算航段平均罗经F_HDT,则罗经在船体坐标系里的方位角F_HG为
F_HG=F_HDT-F_GGA
(2)
式中,F_HG是GNSS罗经在船体坐标系的方位角,F_HDT是检测时段内的平均罗经值,F_GGA是检测航迹线的方位角。
2.4 GNSS罗经定位天线相对ADCP位置偏移量的计算
如图2所示,量取ADCP、GNSS罗经定位与定向所构成的平面三角形的三边长,计算得到GNSS罗经仪在船体坐标系的方位角后,就可以计算GNSS罗经仪定位天线相对于ADCP的平面位置偏移量。
(1) 采用余弦定理计算∠HGA。
∠HGA=arccos(AG2+GH2-AH2)/(2AG·GH)
(3)
(2) 计算AG边的方位角F_AG。
当ADCP在H→G连续的左边时,
F_AG=F_HG+∠HGA
(4)
当ADCP在H→G连续的右边时,
F_AG=F_HG-∠HGA
(5)
(3) 计算GNSS定位天线相对ADCP的偏移量。
OffestX=AG×sin(F_AG)
OffestY=AG×cos(F_AG)
(6)
式中,∠HGA是三角形的GH与GA两边的夹角,AG,GH,AH是三角形AGH三边的边长;F_AG是ADCP与GNSS罗经的定位天线所构成的边在船体坐标系的方位角;OffsetX和OffsetY是以ADCP为原点的船体坐标系;GNSS罗经的定位天线的横坐标x和纵坐标y值。
2.5 ADCP坐标纵轴与船体中轴线不平行量的计算
上述计算的GNSS罗经定位天线相对ADCP位置的偏移量OffsetX和OffsetY是以ADCP为原点的船体坐标系里GNSS罗经的定位天线的横向和纵向的坐标值。由于ADCP与船体平面坐标系不平行,即存在安装偏差,需要计算并在数据采集软件里设置该项偏差,才能采用OffsetX和OffsetY值用GNSS的位置坐标计算ADCP的实时位置坐标。
因为ADCP坐标系的纵轴就是仪器中心与3号探头的中心在水平面上投影的连线,另外在ADCP数据采集软件里,将ADCP坐标系的Y轴与船体坐标系的Y轴的夹角定位为“波束3与船轴夹角”[5],因此计算ADCP坐标系的Y轴与船体坐标系的Y轴的夹角就是计算ADCP波束3(BEAM_3)与船体中轴的夹角。
通过直线航行获得了检测数据F_B,F_G,F_HDT,如图4所示,矢量BEAM_3与矢量F_G的夹角就是ADCP波束3与船轴线夹角。
在测量过程中,由GNSS罗经向船体坐标系和ADCP提供的罗经数值是相同的,从图4可知,F_G与F_HDT的夹角等于BEAM_3与F_B夹角,设为β,底跟踪矢量F_B与GNSS矢量F_G的夹角设为θ,所以有:
α_3=θ-(F_HDT-F_G)=-(θ+F_HG)
(7)
式中,α_3是ADCP波束3与船中线的夹角。
图4 船载ADCP坐标矢量关系示意Fig.4 Schematic diagram of shipborne ADCP coordinate vector relationship
2.6 影响安装偏差探测精度的因素
(1) 直线航行长度。GNSS罗经与船中轴线夹角,通过测船沿直线航行的起、终点直线方位角与在该段GNSS罗经的平均方位角之差来计算。直线段过短,会影响方位角的精度,从而影响GNSS罗经与船中轴线夹角的计算精度,因此应采用较长的直线测量数据进行该偏角测算。建议采用定位精度优于1 m的差分定位型的GNSS罗经仪,根据GNSS定位精度确定直线航行长度,一般选择300~500 m,保证航行直线基线的方位角的精度小于0.5°,并做往、返测量,以获取更丰富的测量数据用于偏差计算和检校。
(2) 测船沿直线航行的稳定性。如果测船沿直线航行期间艏向频繁变动,则GNSS罗经实时数据的一致性就降低了,影响平均罗经方向的精度。另外,艏向不稳定,则GNSS航迹线与船体中轴线也不平行,影响GNSS罗经在船体坐标系里的计算精度。
(3) GNSS罗经的定位和定向精度。如果定位精度低,则测船航行的直线向量的精度偏低,其方位角精度也较低;定向精度低,平均罗经方位精度则会偏低,最终都影响各偏角及ADCP换能器绝对速度的计算精度。
(4) 测量模式。为提高GNSS罗经定位和定向精度,GNSS定位时建议将RTK定位、定向天线与定位天线安装在同一水平面上,其间距应大于1.5 m。
(5) 测量环境。偏差走航探测时,宜在风力小于4级,或风向、流向和测船航向大致在一条直线上的条件下进行,以降低环境气象和水文因素对测量结果的影响。
3 试验及分析
为了满足长江南京以下12.5 m深水航道整治工程安全监管要求,在固定的水文测验断面需要固定的测船和测验人员,由于测船安装条件限制,GNSS罗经仪两个天线不能安装在船中轴的平行线上,ADCP波束3与船首方向基本一致,ADCP和GNSS罗经的两个天线的安装位置示意见图2。
为了探测ADCP外接GNSS罗经流速测量系统安装偏差,测量前,在将ADCP、外部GNSS设备安装牢固后,量取AG,AH,GH三边长度, GNSS采用RTK定位。ADCP数据采集软件的初始设置各项安装偏差为0,然后测船沿逆流的直线方向航行约300 m,ADCP数据采集软件采集记录了*.PD0、*_GPS.TXT和*_EH.TXT三个文件。完成走航检测后,按照上述方法计算各项安装偏差。图3给出了未校准安装偏差时的船迹线(相对于GGA)和ADCP采用GNSS罗经提供的底跟踪航迹线(相对于底跟踪)。可以看出,受安装偏差影响,两个航迹方向呈现大于100°的夹角。如果不将采用GNSS罗经的ADCP底跟踪航迹线的偏角修正到船体坐标系,将导致底跟踪方向错误,测得的流速的方向也是错误的。通过“外部罗经偏移量”修正后得到的底跟踪航迹线与船迹线方向一致,将“外部罗经偏移量、波束3与船轴线夹角、offset x、offset y” 四项安装偏移量输入到ADCP数据置设页里,经外部罗经偏移量纠正后,看出两个航迹完全重合,见图5。
表1给出了同一次测验数据,偏置改正前后,分别采用底跟踪和GGA参考的该测段流速、流量的数据。从表1可以看到,当不修正安装偏移量,采用底跟踪的流向是错误的,采用GGA参考,流量和流速全部是错误的;安装偏移量修正后,采用底跟踪和GGA参考测得的流量、流速的大小和流向都基本一致,每一个数据组的位置坐标也改算到ADCP上了,提高了流量测验精度。

图5 外部罗经安装偏差改正后ADCP航迹Fig.5 ADCP trace after correction of external compass installation deviation
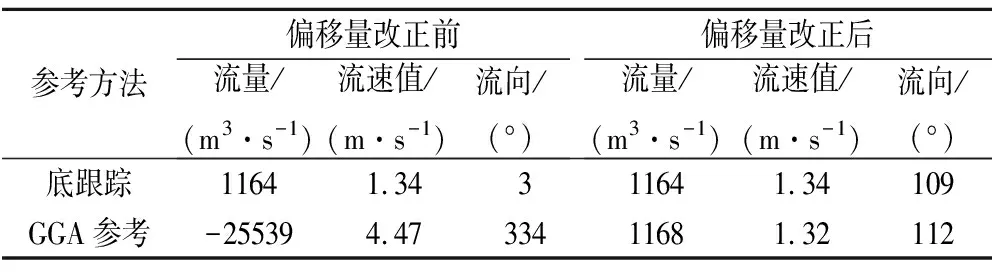
参考方法偏移量改正前流量/(m3·s-1)流速值/(m·s-1)流向/(°)偏移量改正后流量/(m3·s-1)流速值/(m·s-1)流向/(°)底跟踪11641.34311641.34109GGA参考-255394.4733411681.32112
4 结 论
采用ADCP实施流量测验,需要为其提供正确的船速和船向。通常ADCP采用底跟踪和内部磁罗经来实现,但由于存在河床底部走沙问题造成底跟踪速度错误、以及ADCP内部磁罗经受船体磁场干扰导致内部罗经提供错误的方位等问题,使该技术应用受到很大限制。
GNSS罗经仪不受磁场影响,其罗经精度优于0.1°,当采用RTK差分定位时,其定位精度优于5 cm。GNSS罗经的位置和方位数据的更新率可达到20 Hz,安装使用方便,性能稳定。ADCP可以外接GNSS罗经构成测流系统,采用本文方法探测设备之间的安装偏差并在数据采集或回放软件里设置安装偏差修正值,ADCP就能获得GNSS罗经仪提供的高精度的坐标和方位的绝对基准,能避免底跟踪失败和内部罗经错误,提高ADCP对测流环境的适应能力和流速的测量精度。当然,本文提供的探测与计算方法仅率定与校准了ADCP测流系统在平面坐标系上的偏差,如果因大风或船舶剧烈转向浪造成测船存在较大幅度的纵横或艏向摇摆,仅作二维修正还不能有效提高ADCP流量测验精度,有效的办法是避免在风浪大的天气进行测验作业。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
舰船科学技术(2022年11期)2022-07-15
初中生学习指导·提升版(2022年4期)2022-05-11
地理空间信息(2022年3期)2022-04-01
第二课堂(小学版)(2021年4期)2021-01-18
大众科学(2020年7期)2020-10-26
船舶标准化工程师(2019年4期)2019-07-24
计算机辅助工程(2018年4期)2018-10-09
小天使·六年级语数英综合(2018年1期)2018-10-08