基于虚拟同步机技术的船舶岸电电源控制策略
2019-12-30 08:46缪新招黎洪光彭灵利黄雅莉李冠发李美依黄文焘
港工技术 2019年6期
缪新招,黎洪光,彭灵利,黄雅莉,刘 丹,李冠发,李美依,黄文焘
(1.广州南沙供电局,广东 广州 5114400;2.上海交通大学 电子信息与电气工程学院,上海 200240)
引言
船舶在港口停靠时,船舶辅助发电机常燃烧重油发电,但是低效率的柴油发电机会排放出大量的空气污染物,同时会对码头附近造成较为严重的噪声污染。岸电技术作为一种电能替代技术,使船舶靠港时使用陆地电源供电,停止使用燃油辅机供电以降低其对港口及周边环境的污染。
现今我国港口和船舶电网频率皆为50 Hz,而国外船舶不像国内船舶电网采用50 Hz交流电,而是大多采用60 Hz交流电,为解决外国船舶停靠期间无法使用国内港口岸电电源的情况,就需要研究适合此种场景的岸电变频技术。岸电电源作为双频岸电的核心器件,其优异的控制效果对岸电系统稳定运行至关重要。岸电电源在不同运行工况下控制策略也需要做相应的调整,这种调整主要体现在岸电电源逆变器的外环控制环节。下垂控制[1]通过有功功率-电压相角、无功功率-电压幅值控制,可以模仿同步发电机的静态特性,降低船舶电网并入岸电电源时对船舶电网的冲击,同时有效实现负荷转移。下垂控制仅依靠检测本地信息即可实现[2],且可以在船舶并入及船舶退出模式间直接切换[3],避免模式切换的暂态振荡,易于实现船舶灵活接入岸电[4,5]。但是,下垂控制的岸电电源不能给岸电系统贡献惯性,对系统故障较为敏感,在船舶上的电机负载、大型泵组启停时,会对船舶电网造成冲击,引起电网振荡。稳定性不足。
虚拟同步发电机技术(Virtual Synchronous Generator Technology,VSG)[6]可以使岸电电源具有旋转惯性和阻尼特性,这些特性在同步发电机中是存在的,该技术在提高系统稳定性上有较好的效果[7]。文献[8]设计了一种新型整体控制策略,它基于VSG,使电源具有了调频调压和功率控制功能。
如果能够根据运行工况自适应变化而自行调节阻尼系数而非将阻尼系数固定,就可以给控制系统更优秀的动态特性。因此,本文使用小信号分析模型研究阻尼控制系数对系统阻尼特性的影响,进而制定了岸电电源自适应阻尼控制策略。在PSCAD/EMTDC中建立仿真模型,对固定阻尼系数和自适应阻尼系数两种控制策略进行了分析与比较。
1 虚拟同步电机技术控制方案
虚拟惯性频率控制这一 VSG控制模型最早是由学者F Gao提出的[9]。该模型的优势在于逆变器在外特性上均表现为电压源,具有较强的稳定性。在传统方案的基础之上,本文对频率控制、电压控制以及内环控制三方面分别进行改进。
基于VSG技术的岸电电源拓扑结构如图1所示。为了分析的方便,本文将岸电电源整流侧等效为恒压源Ud,着重分析采用虚拟同步电机技术的逆变侧。有功功率及无功功率设定参考值Pref和Qref由中央控制器发出,通过计算,VSG模块形成机端参考电压幅值E以及相位角θ,进一步将指令发送给三相正弦发生器,实时调整岸电电源输出功率。

图1 基于VSG的岸电电源模型及其控制结构框架
2 基于VSG的频率与电压优化控制策略
2.1 频率模块优化控制
本质上虚拟同步发电机是逆变电源,但它又与实际的同步发电机不同,因为其控制结构中没有测速器、调速器等,因此需要设计功率调节环节模拟这个功能。
转子机械方程为:
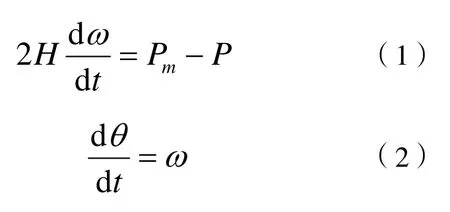
式中:H为VSG的虚拟惯量常数;P为VSG控制下岸电电源端口输出有功;Pm为输入的机械功率。
为了使岸电电源能够根据有功功率变化对系统频率作调整,需引入下垂控制关系:

式中:D为有功下垂系数;Pref和ωref为输出侧的参考有功功率以及角速度。
另外,为更好地模拟同步发电机旋转轴而增加阻尼项kk(ωr-ωgrid),其中k为阻尼控制系数,传递函数为:

频率控制部分如图2所示。系统不断检测实时船舶电网频率,结合中央控制器发出的有功参考值,根据计算偏差对输出频率做相应调整,给出岸电电源相位角指令。
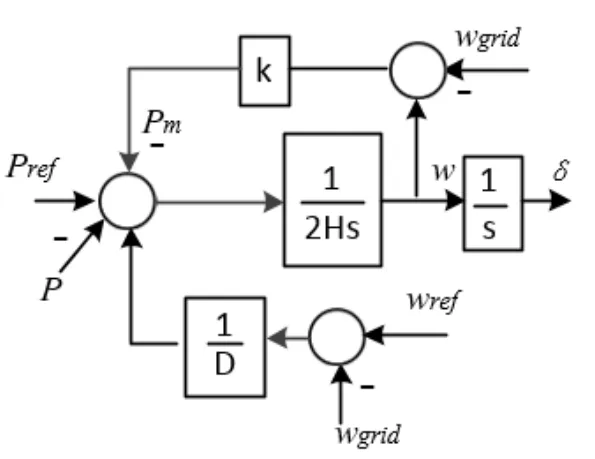
图2 频率控制
2.2 电压模块优化控制结构
传统虚拟惯性频率控制中电压电压输出指令包括ED和EQ两个部分。ED为电压无功下垂指令:

式中:Q为 VSG控制下岸电电源端口输出的无功功率;DQ为无功下垂因子;Eset为机端电压参考值。
EQ为无功功率误差调节指令:
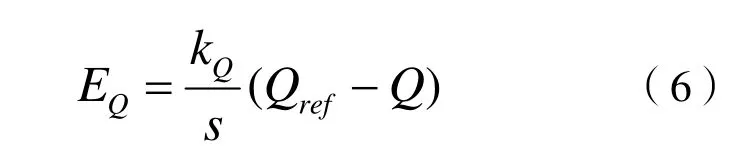
式中:kQ为积分参数;Qref为无功输出参考值。
为了使船舶并网运行时,无功功率的调节更加精确,本文通过引入比例积分(PI)环节来减小因无功功率偏差所造成的输出电压波动。本文的优化控制方法下岸电电源的参考电压形式为:

图3为优化控制策略。PI控制器下无功响应速度很快,当岸电系统受到扰动时,控制结构可以快速响应调节,经一定时间后系统可稳定至新的工作点。

图3 优化控制策略
3 基于VSG岸电电源内环优化控制策略
基于 VSG的岸电电源频率以及有功功率、无功功率是最重要的输出电量,控制策略必须要保证这三个电量输出的稳定性以及较高的控制精度。本文在控制结构上,采用电压电流环控制结构,通过岸电电源输出端实时采样反馈控制效果,以反馈偏差更新控制指令,使输出变量趋于稳定。传统逆变器电压电流内环控制的主要目的是及时准确地跟随上层控制器的控制指令,并能根据系统实际电压电流进行更细致的调节。在基于 VSG的岸电电源优化控制中,电压电流内环控制需要跟随上层VSG算法给出的电压、相位指令,并根据反馈进一步调节。
图4为基于dq0坐标系的控制结构。这里电压电流控制器采用整体控制特性较好的比例积分控制。比例控制能迅速反应变量所产生的误差,积分控制则可以弥补比例控制无法消除的静态误差。合理的控制系数可以提升系统整体的动态性能,并且使得稳态误差为零。
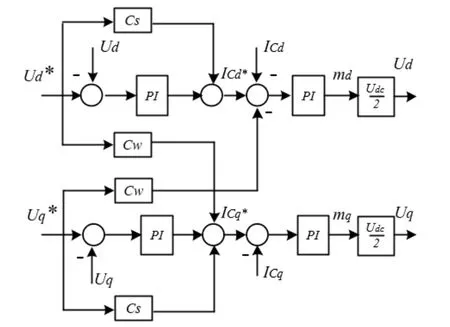
图4 dq0坐标系中岸电电源电压电流控制器结构
4 自适应阻尼系数控制
结合岸电电源与同步发电机之间的等效关系和式(4),得到岸电电源有功输出输入的传递函数如式(8)所示:
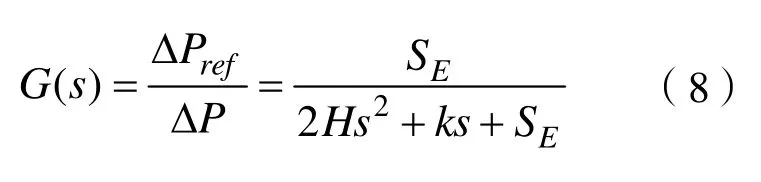
二阶模型的自然振荡角频率ωn和阻尼系数ζ也可以得出。
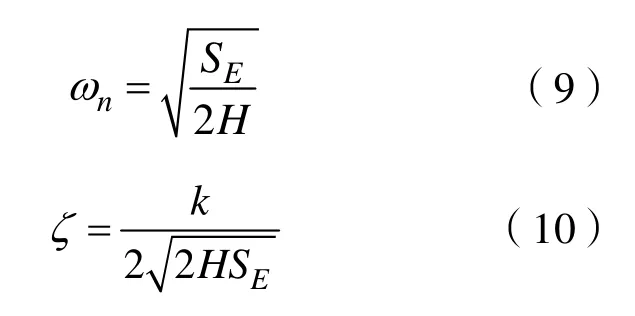
观察阻尼系数表达式可得出结论,阻尼控制系数可以直接影响系统的时域特性。具体表现为,阻尼控制系数数值较小时系统阶跃响应呈现出振荡衰减态势。当阻尼控制系数数值变大时系统阶跃响应呈现出无超调单调上升态势。阻尼控制系数数值继续变大时,系统阶跃响应虽然与前一种状态相似同为无超调单调上升,但后者响应更慢。

前文给出了阻尼控制系数如何影响系统的阻尼特性,可以得到采用本文提出的自适应阻尼系数控制后阻尼控制系数k与岸电电源有功功率输出P关系如图5,该关系满足式(11)。有功输出小于设定值越严重,阻尼控制系数越小,系统响应速度变快;有功输出大于设定值越严重,阻尼控制系数k越大,系统超调减小,这样才能使有功偏移保持较低水平。而当有功输出与设定值的偏差足够大,即大于某一设定值时,阻尼控制系数将不再随着偏差增大而增大。
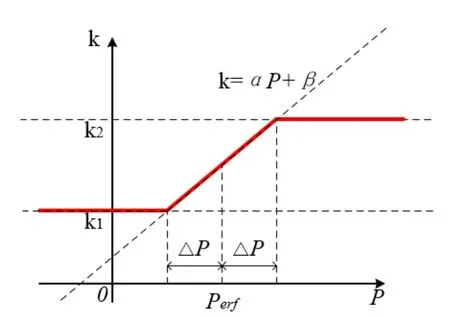
图5 k-P关系曲线
5 仿真验证
5.1 系统参数
PSCAD/EMTDC仿真平台中VSG逆变型岸电电源控制结构(图1)仿真中,岸电电源整流侧等效的恒压源1.6kV,储能电容 150 μF,滤波电感1 mH,电容400μF。微网线路电压等级为380V。自适应阻尼系数控制中k1=0.02,k2=0.04,α=0.05,β=0.015。
本文将自适应阻尼系数控制结构与固定应阻尼系数控制进行对比仿真。仿真设定船舶接入岸电系统运行0 s时岸电电源功率突增,有功从由0增加至0.3 MW,无功从0增加至0.1 MVar。5 s后船舶负荷突增,船舶负荷有功从0.3 MW增加0.9 MW到达1.2 MW,无功从0.1 MVar增加0.3 MVar到达0.4 MVar,但岸电电源输出指令不变,始终为有功0.3 MW,无功0.1 MVar。
5.2 算法对比
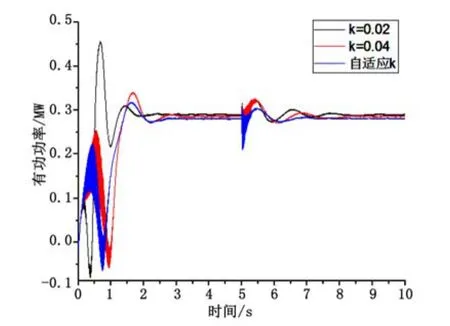
图6 岸电电源有功功率响应曲线
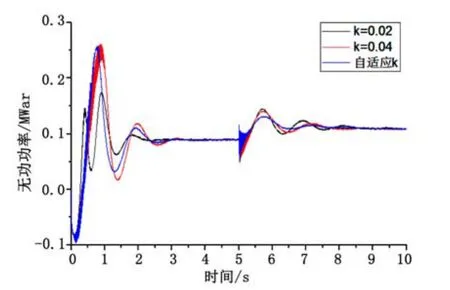
图7 岸电电源无功功率响应曲线

图8 岸电电源频率响应曲线
固定阻尼系数控制下,当阻尼系数较小时,岸电电源有功输出响应较快,但波动较大,输出有功在经历了几次超调后浮动于参考值附近,最终趋于稳定;当阻尼控制系数数值较大时,输出有功几次超调后显著减低,但岸电电源输出响应较慢,稳定时间较长。
而采用自适应阻尼系数控制后,输出有功小于有功设定值时,阻尼控制系数k较小,系统能以更快的速度响应,而当有功大于有功设定值时,阻尼控制系数较大,系统超调减弱。采用自适应阻尼系数控制后,岸电系统输出有功动特性明显增强,无功和频率特性两种性能对比于固定阻尼系数也得到了增强。
综上,采用自适应阻尼系数控制的岸电电源输出特性更为优良,能够更好的应对系统出现的干扰,保持输出稳定,且具有更强的动态特性。
6 结语
本文提出了一种基于 VSG的船舶岸电电源自适应阻尼系数控制策略。该控制基于虚拟惯性频率控制方案,对岸电电源有功频率控制、无功电压控制以及电压电流环控制分别进行优化改进。阻尼控制系数的数值大小对系统输出具有重大影响,本文通过小信号模型对其进行分析获得其具体影响,以自适应阻尼系数应对系统功率波动。自适应阻尼系数控制方案增加了控制的灵活性,加强了岸电系统动态特性。最后,在 PSCAD/EMTDC建模仿真,证明了本文所提方法的有效性。
猜你喜欢
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
山东冶金(2019年3期)2019-07-10
北方工业大学学报(2019年5期)2019-03-30
铁道通信信号(2019年1期)2019-03-21
消费导刊(2018年10期)2018-08-20
大经贸(2017年11期)2018-01-08
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11