
基于VISSIM的交叉口可变导向车道控制系统仿真与评价
2019-12-30 03:01许佳佳许倩倩潘立琼
太原学院学报(自然科学版) 2019年4期
许佳佳,许倩倩,潘立琼
(1.安徽三联学院 交通工程学院,安徽 合肥 230601;2.安徽三联学院 计算机工程学院,安徽 合肥 230601)
0 引言
交叉口作为城市道路网的节点,其通行效率的提升对路网运行通畅有着重要意义,但由于其不同流向的交通流具有时间与空间不均衡性,在固定交叉口渠化方案下,交叉口的通行能力得到了较大的限制,因此可考虑利用设置可变车道的方式,对车道功能进行优化协调,充分利用交叉口内的空间资源,从而提升交叉口的通行能力。相关学者对可变车道也做了诸多研究,曲昭伟通过运用概率统计方法与交通冲突技术,分析了逆向可变车道交叉口的左转车流的释放特性以及其对逆向可变车道车流的干扰程度[1]。徐书东提出,在交叉口进口道设置一种能通过信号灯控制的逆向可变车道,解决交叉口因不均衡交通流所导致的交通拥堵问题[2]。张玥玥基于交通流量的特性设计了可变车道与信号灯联合控制系统,通过系统编程实现对车道变更以及信号配时的变化进行实时监控[3]。张薇通过优化视频采集技术,并结合交通流的特性及交叉口渠化参数等,提出了一种潮汐车道自主控制系统[4]。刘怡通过对设置逆向可变车道的交叉口交通流情况的分析,建立了交通流分阶段消散流率模型,并在此基础上结合相序优化,建立了可变车道预信号配时参数模型[5]。祝飞通过分析道路交通拥堵原因,在现有的道路形式基础上提出一种应用中间带与路肩进行优化设计可变车道的方法[6]。蔡建荣从无人驾驶车辆的角度,对其在用户最优或系统最优两个目标下进行系统优化,建立了针对无人驾驶车辆的可变车道模型[7]。徐洪峰通过分析重载交通的特点,并设置可变车道的方法,提出了基于交通事件的拉链车且适用于信号控制交叉口的动态车道管理方法[8]。魏家蓉基于油耗与排放费用最低建立目标函数,将可变车道的数量作为决策变量,同时考虑延误数值的大小,建立了可变车道数量决策模型[9]。上述研究中,主要是从交叉口延误、无人驾驶或环境效益等不同角度进行可变车道的设置方法的研究,对于信号控制交叉口进口道可变导向车道的交通运行仿真方面的研究较少。
本文针对城市道路信号控制交叉口各进口道流向交通流量的不均衡性进行分析,以及结合交叉车道条件,设计了交叉口可变导向车道的控制系统,并运用VISSIM软件对交叉口进行建模,对可变导向车道处于不同状态时的交叉口交通运行情况进行仿真,通过软件统计所得的进口道总体车均延误指标前后对比变化情况,确定在不同的进口道左转与直行交通流量比例情况下可变导向车道所应对应的最佳状态,为交通管理者进行交叉口可变导向车道的状态变换提供决策依据。
1 交叉口可变导向车道控制系统设计
针对交叉口每一个进口道,分析其左转与直行车流量的变化规律,当该进口道车道数在3条以上,而且一天内左转和直行流量分布具有明显的潮汐特性时,将该进口道的一条中间车道渠化为可变导向车道。通过对交叉口进口道直行与左转不同方向的交通流量分布状况,比较左转与直行方向及整个路口车道转变前后的运行效率指标,作为下一相邻时刻的车道变换的决策依据,向交叉口可变导向车道控制系统输入命令,根据控制系统的控制流程对可变导向车道实施变道策略,进行进口道导向车道的智能变换控制,并将控制器的执行命令传递给可变车道指示牌,实现交叉口进口道直行与左转方向的导向车道的最佳组合渠化设置。
交叉口进口道可变导向车道的具体设计形式如图1所示。在可变导向车道,即车道2上设置2条停车线,停车线1为交叉口停车线,停车线2设置在渠化区开始处,并对应有动态LED车道方向信号灯,为左转与直行组合形式的灯。当车道转向功能发生变换时,对应的动态LED车道方向信号灯两种方向均显示全红状态禁止通行,待原通行权下的2条停车线之间的车辆清空后,动态LED车道方向信号灯显示变换后的车道方向,并允许后续车辆驶入。
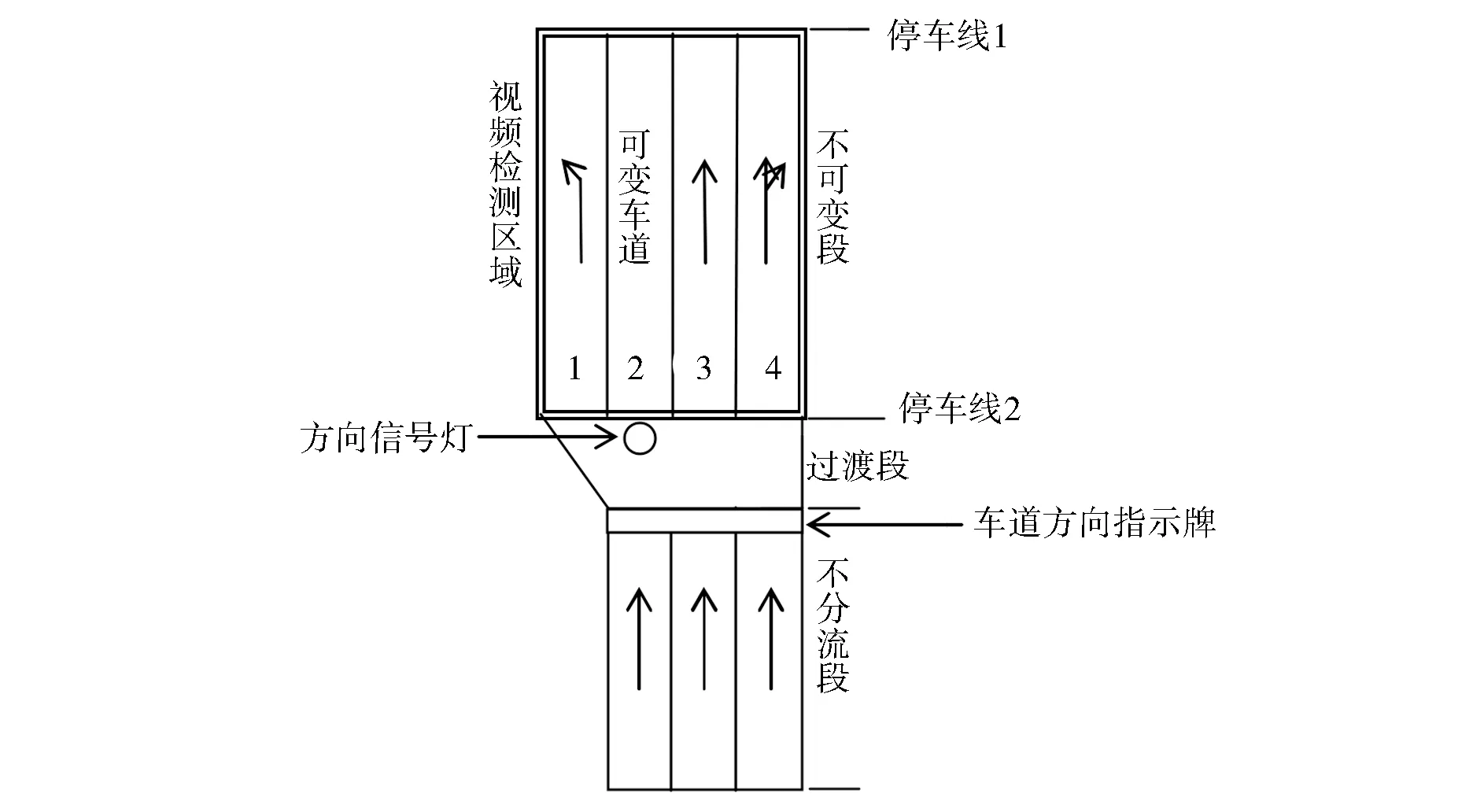
图1 交叉口进口道可变导向车道设置形式Fig.1 Variable guide lane setting form of intersection inlet
2 基于VISSIM的导向车道变换仿真与评价
2.1 VISSIM仿真系统基本原理与步骤
VISSIM由德国PTV公司开发,是一款进行微观交通与建模仿真的软件工具,通过在软件中对实际交通流系统中的车道设置形式、车型比例构成、信号配时方案等路段与交叉口的各种交通条件进行建模设定,实现对交通系统的运行情况进行仿真分析,从而评价交通组织与设计方案的合理性以及提出相应的优化措施。
VISSIM软件中的交通流是随机与离散的形式进行定义,车辆进行横向的车道变换运动采用了基本规则Rule-based的算法,并且划分保守型和冒险型驾驶员行为;车辆的纵向运动模型采用的是Wiedemann教授1974年发明的“心理-生理跟驰模型”,即当后车驾驶员心理上认为与前车之间的距离小于安全距离时开始减速,直到之间的距离增大到心理安全距离后开始缓慢加速,如此周而复始,形成一个加速、减速的迭代过程,基于这一理论进行的交通仿真能较真实地重现实际交通状况。其基本步骤如下:
1)确定研究对象,调查其车道功能划分与尺寸、各车道的交通流量流速、各相位的信号时长、公交站点的布置等基本数据与参数;
2)通过其他绘图软件绘制研究对象的bmp格式平面形式图或效果图;
3)将上一步中所绘制的底图作为背景导入VISSIM软件中,根据研究对象的尺寸设置底图的比例,并在底图上对应位置绘制路网;
4)设置车型比例的构成以及车辆运行规则参数,输入道路的流量数据,划分路径,设计信号控制机,布置信号灯;
5)在路网上设置相应的检测器,选择需统计的相关交通运行评价指标,设置仿真的时间与步长,进行动画仿真;
6)根据统计所得到的交通运行评价指标,分析现状交通问题,优化交通组织与设计方案,重复以上步骤对优化方案仿真评价,直至达到优化效果。
2.2 可变导向车道不同状态下的VSSIM仿真评价方法
本文选取交叉口作为研究对象,通过VISSIM仿真就交叉口导向车道的现状设置合理性进行评价,并在交叉口各流向流量分布情况的分析基础上,通过可变导向车道控制系统进行可变车道的导向转变,优化交叉口的车道功能划分,再运用VISSIM仿真对优化后的方案进行对比评价,说明优化后所提升的交叉口通行能力以及减小的交叉口每车平均延误效果。基于VISSIM的导向车道变换仿真与评价,具体仿真过程如图2所示。
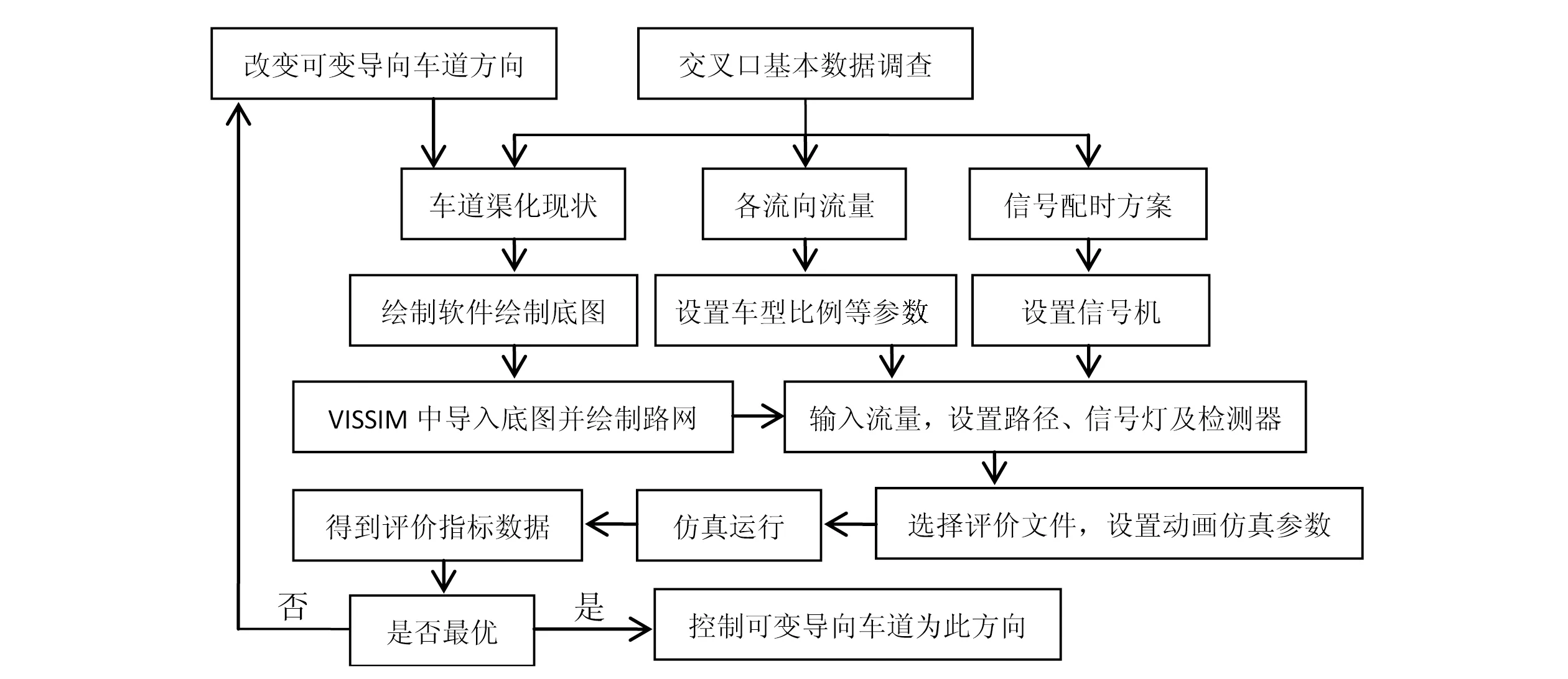
图2 交叉口进口道可变导向车道变换控制运行仿真流程Fig.2 Simulation process of variable guide lane change control operation at intersection entrance
2.2.1基础数据收集
进行VISSIM仿真运行评价,需要收集相关的仿真数据,作为系统参数输入仿真系统,从而才能进行仿真的运行,对于交叉口相关的仿真,收集的相关数据主要有:一是交叉口的平面形式,主要包括交叉口各个进口道的不同方向导向的车道数、车道宽度和纵坡度等;二是交叉口信号配时的情况,主要包括相位个数、各相位的时间分配以及全红时间等;三是交叉口现状流量的情况,主要是交叉口各个进口道不同流向的高峰小时交通当量。
2.2.2建立可变导向车道变换前状态所对应的交叉口模型
根据所采集到的交叉口相关数据,在VISSIM软件中建立可变导向车道变换前状态所对应的交叉口结构模型,结合实际情况与数据值输入仿真系统相关的参数值,并设定与实际相符的运行规则,主要包括流量与信号配时,并且设置好仿真过程中需要对模拟运行情况的相关运行评价指标进行数据统计的功能,然后进行调试与运行仿真,并输出所统计的数据,主要包括交叉口各进口道的车均延误、排队长度,在此基础上可以推算出交叉口的服务水平,从而对交叉口的运行情况进行量化评价。
2.2.3建立可变导向车道变换后状态所对应的交叉口模型
对可变导向车道变换前状态所对应的交叉口各进口道交通运行情况进行分析,基于各进口道不同方向导向车道的占有率,结合可变导向车道智能控制策略,优化交叉口各进口道不同流向导向车道的组合设置方案,在VISSIM软件中建立可变导向车道变换后状态所对应的交叉口模型,同理于上一步过程,得到此状态下交叉口的车均延误、排队长度,并推算出其服务水平。
2.2.4可变导向车道不同状态下交叉口运行效益对比与影响分析
通过两次可变导向车道不同状态下交叉口模型仿真计算,得到变换前后的参数值,并进行对比,可直观地看出可变导向车道的变换对交叉口运行情况所产生的影响,从而正确作出可变导向车道变换决策,体现可变导向车道智能控制系统的优越性。
3 实例应用
本文选取合肥市典型拥堵节点——金寨路与繁华大道交叉口作为研究对象,进行可变导向车道控制系统的设计,并运用VISSIM软件对交叉口可变导向车道不同状态下的交通运行情况仿真评价。
3.1 交叉口交通流量流向分析与可变车道设置
调查某工作日15点至17点的金寨路与繁华大道交叉口各进口道左转与直行方向的交通流量,因繁华大道所对应的东、西进口的车流总量较小,因此选取车流量较大的金寨路所对应的的北进口与南进口进行分析。
将金寨路所对应的北进口与南进口左转与直行流量占进口道总流量的比例差值进行计算、绘图、分析如图3所示,南进口左转与直行车道的比例差距范围在-7%~61%之间,区间长度为68%;南进口左转与直行车道的比例差距范围在39%~85%之间,区间长度为46%。可见,南进口左转与直行流量的变化幅度显著大于北进口,即其交通流量流向的不均衡性更为突出,因此选取北进口进行可变车道设计,选取现状北进口距中央分隔带的第二条左转车道作为可变车道,并且分别选取北进口左转与直行流量比例差距范围两端极限情况的15:40~15:45时刻与16:45~16:50时刻的交通流量作为输入参数,运用VISSIM软件进行仿真对比,分析不同时刻可变车道不同状态下的交叉口运行效益,从而确定可变车道的最佳状态。
3.2 可变导向车道不同状态下的交叉口仿真
3.2.1交叉口渠化与配时参数
金寨路与繁华大道交叉口东西方向为繁华大道双向10车道,南北方向为金寨路双向12车道,南北进口的导向渠化区域均有展宽增加一条车道,即双向14车道,其中北进口现状情况是直行车道3条,左转车道2条,直右车道1条,右转车道1条,如图4中(a)图所示,可变导向车道为距中央分隔带的第二条左转车道,若对其进行控制转换,由左转状态变为直行状态,则如图4中(b)所示形式。
金寨路与繁华大道交叉口的信号控制形式为固定信号控制,周期时长149 s,共有5个相位,具体的配时参数如表1所示。
3.2.2可变车道不同状态下的交叉口交通运行仿真
3.2.2.1 现状可变车道为左转状态的交叉口模型
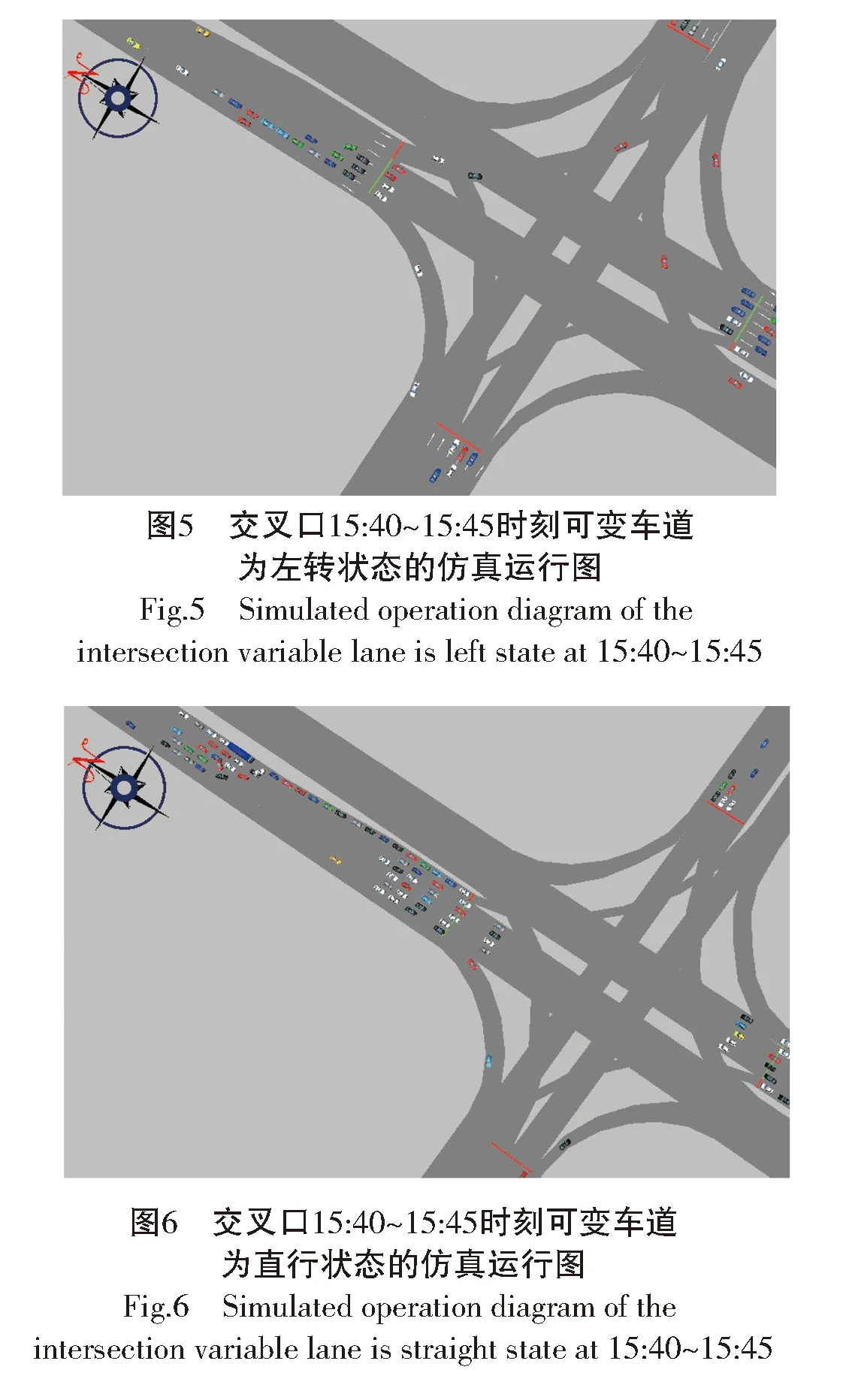
首先根据交叉口现状的平面形式在VISSIM中绘制路段与连接器,分别输入15:40~15:45时刻与16:45~16:50时刻的交通流量数据,并根据各流向流量比例设置各个进口道的车辆行驶路径,然后根据交叉口的信号配时数据建立信号控制机,并在进口道停车线处设置信号灯,最后在路段上设置行程时间检测器,选择延误评价文件,设置好仿真参数,即进行动画运行仿真如图5所示,导出vlz后缀格式的评价文件数据,可变车道为直行状态时北进口车道的左转与直行方向的车均延误、车均停车时间、车均停车次数等运行评价指标。
3.2.2.2 可变车道为直行状态下的交叉口模型
将现状的交叉口模型进行复制,在其路网结构中将北进口距中央分隔带的第2条左转车道进行修改转变为直行车道,路段的交通流量依然为15:40~15:45时刻与16:45~16:50时刻的交通流量数据,即输入的总流量无需修改,但需对路网修改过程中打断的左转路径以及新增的直行车道的路径进行重新设置,以及由于可变车道导向的转变对其停车线上的停车灯进行修改,检查路段上的行程时间检测器设置情况,并再次进行延误评价文件的选择与仿真参数设置,然后进行动画运行仿真如图6所示,同理导出vlz后缀格式的评价文件数据,得到同一时刻同样流量输入情况下,可变车道为直行状态时北进口车道的左转与直行方向的车均延误、车均停车时间、车均停车次数等运行评价指标。
3.3 数据分析
通过VISSIM软件的仿真分析,分别得到15:40~15:45时刻与16:45~16:50时刻北进口左转、直行方向的车均延误、车均停车时间、车均停车次数以及北进口总体车均延误数据如表2所示。
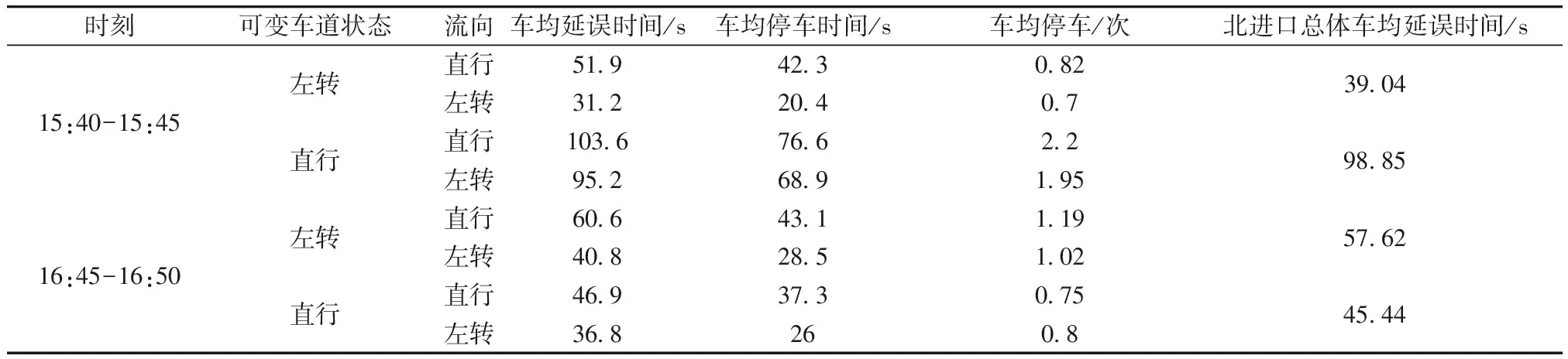
表2 金寨路与繁华大道交叉口北进口左转与直行方向运行评价指标Table 2 Left and straight direction evaluation index of the north entrance in Jinzhai Road and Fanhua Avenue intersection
从上表中数据可以看出,针对15:40~15:45时刻所对应的交叉口北进口交通流量左转比例偏高的流向组成情况,仿真结果显示可变导向车道为左转状态时,北进口直行、左转以及总体车均延误较可变导向车道为直行状态时均下降50%以上,因此在此时刻的可变导向车道的状态决策应为左转,从而减小进口的车均延误;而16:45~16:50时刻交叉口北进口左转流量比例相对直行较小的情况下,仿真结果显示可变导向车道为左转状态时,北进口直行、左转以及总体车均延误较可变导向车道为直行状态时均有所上升,所以此时刻的可变导向车道的状态决策应为直行。
4 结论
本文针对交叉口不同流向的交通流量的时间与空间不均衡性,交叉口进口道导向车道的划分与交通通行状况匹配度不高,交叉口的资源利用率提高程度有限,通过选取交叉口的导向车道进行可变设置,对可变车道处于不同状态的交通运行状况进行VISSIM仿真,基于所统计的车均延误、车均停车时间、车均停车次数等指标,直观地对可变车道设置方案所产生的效果进行评价,实现能够基于后续时刻各流向的流量预测进行可变车道的预先决策,从而提升实现动态的交叉口车道功能划分与变换,提升交叉口的通行效率。
猜你喜欢
太原科技大学学报(2022年6期)2022-12-26
建材发展导向(2022年14期)2022-08-19
中国交通信息化(2022年2期)2022-04-26
建材发展导向(2021年19期)2021-12-06
小天使·四年级语数英综合(2021年3期)2021-05-10
天津建设科技(2020年2期)2020-05-13
黑龙江交通科技(2020年1期)2020-03-18
中国人民公安大学学报(自然科学版)(2019年3期)2019-10-23
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2018年7期)2018-09-14
