基于EtherCAT的导弹发射车控制系统设计与实现*
2019-12-28 06:23:58李晓松朱新勃蔡艳芳
弹箭与制导学报 2019年4期
李晓松,朱新勃,蔡艳芳
(1 西安电子工程研究所, 西安 710100; 2 西安现代控制技术研究所, 西安 710065)
0 引言
导弹发射车(以下简称发射车)控制系统的功能包括控制发射车调平、控制发射架起竖、控制定位定向系统产生发射车定位定向信息、产生发射车时间基准、控制伺服系统跟踪目标、和武器系统指挥车交互数据、控制导弹系统和发射车安全联锁管理。以往的发射车控制系统中,实现上述功能需要不同种类和数量计算机实现,计算机间通过现场总线交互数据来实现发射车控制系统的功能。随着计算机技术和实时工业以太网技术的发展,文中基于EtherCAT(ethernet for control automation technology,一种基于以太网的实时工业现场总线通信协议和国际标准)将电液控制技术、机电控制技术、火力控制技术、分布式控制技术和健康管理技术融为一体,设计了一种发射车控制系统,实现发射车控制系统功能。
1 控制系统设计
1.1 车体调平及发射架起竖控制
导弹发射车工作时需要对车体进行调平,对发射架俯仰进行架设。调平支撑腿按照驱动方式分成机电式和电液式两种。机电式的调平支撑腿虽然有不同的结构形式(涡轮蜗杆、T形丝杠和双向超越离合器),但针对控制系统来说均为通过控制电机旋转来驱动丝杠做直线运动。电液式的调平支撑腿也有不同的结构形式(液压缸和马达),但针对控制系统来说均为通过控制阀控液压缸或者阀控马达驱动丝杠做直线运动。控制系统通过倾角传感器测量车体姿态闭环,通过控制支撑腿运动完成车体调平。车体调平的过程分成2个阶段。第一个阶段是支撑腿落地的检测,机电式控制系统通过电机电流的大小来判断,电液式控制系统通过压力传感器的大小来判断。落地检测的判断方式,电液式控制系统每次调平都需要上升一段距离才能有效的判断支判断支撑腿是否落地的条件撑腿是否落地,而机电式控制系统通过电机电流的方式判断支撑腿是否落地的条件更简单,并且不受环境温度的影响。在确认没有虚腿的前提下,进入调平过程的第二个阶段(车体调平),采用最高点不动,其它3点向最高点看齐的调平方法,整个过程分成粗调和精调两个步骤,粗调过程中,其它3点动态同时调整,以最大速度将车体倾角调至20′以内。精调过程中,为了减少调平过程中的耦合(倾角传感器安装面无法保证与4个支撑腿的支撑面绝对平行),先调整纵摇角(同时升纵摇角低的两个支撑腿),后调整横滚角(同时升横滚角低的两个支撑腿),调整速度随车体倾角线性变化,将车体倾角调至2′以内。最后,根据倾角传感器的数据,计算出支撑点最低的支撑腿,调节支撑点最低的支撑腿,使横滚角和纵摇角逼近目标值(系统要求的调平精度)。
发射架起竖的电动缸按照驱动方式分成机电式和电液式两种。针对控制系统来说均为通过控制电机旋转来驱动丝杠或者通过控制阀驱动液压缸做直线运动。控制系统通过角度测量装置(旋转变压器或者编码器)测量的发射架起竖角度闭环,控制支撑腿运动完成发射架起竖。发射架起竖一般情况下都是通过2个电动缸同步运动完成发射架起竖,电液式电动缸通过机构本身的刚性保证同步,相对于机电式电动缸来说,具有安装空间小和安全系数高等优点。如果发射架需要旋转的话,需要选择两通道油路旋转接头实现液压油的过环。
无论是机电式或者电液式的发射车调平和发射架起竖系统,控制系统都是通过采集传感器数据控制执行机构来完成车体调平和发射架起竖。数据采集和控制执行机构一般都是通过现场总线完成。例如:通过现场总线直接采集倾角传感器和编码器数据,通过现场总线控制阀或者驱动器(驱动器控制电机转速)完成电动缸的升缩。为了更安全、可靠、简单的构建控制系统,综合对比CAN、PROFIBUS、DEVICENET和RS422等实时性数据总线,认为通过CAN总线完成传感器数据采集和控制执行机构可以满足GB/T 3187—1994可靠性的定义(指产品在规定的条件下和规定的时间内,完成规定功能的能力)。就 CAN 总线而言,这里的“产品”是指完成CAN总线通信所需的软、硬件。CAN 总线是 controller area network(控制器局域网)的简称,是20世纪80 年代由德国 Bosch 公司开发的有效支持分布式实时控制的总线式串行通信网络,已得到 ISO、IEC 等众多标准组织的认可[1-6],成为一个开放、免费、标准化、规范化的协议,因而在工业控制、汽车电子、电力系统、医疗仪器、工程车辆、船舶设备、楼宇自动化等领域得到了非常广泛的应用[7]。
基于CAN总线构建发射车调平和发射架起竖的电液式控制系统具有设备少、成本低和可靠性高等优点。发射车控制系统配备CAN接口模块、开关量输入输出(DI /DO)接口模块和模拟量输入(AI)接口模块,在多任务的软件系统上运行一个发射车架设/撤收的任务就可以实现发射车调平和发射架起竖的控制功能。
1.2 时间控制
武器系统工作时,所有装备必须统一在一个时间轴上。发射车控制系统利用卫星授时(GPS或者北斗)信息或指令接收系统接收到的时间同步脉冲,校准本地时钟实现时间同步。基于EtherCAT的分布时钟(distributed clock,DC)产生导弹发射车的绝对时间。
分布时钟是用于EtherCAT网络中使用EtherCAT通信的设备都使用相同的系统时间,从而实现各个控制设备之间任务的同步执行。EtherCAT从站设备可以采用分布时钟产生同步信号、触发输入输出信号或中断控制信号等。在EtherCAT网络中,一般以靠近主站的第一个从站节点作为参考时钟,该参考时钟采用IEEE 1588协议,并由该参考时钟对网络中的其他设备和主站的从时钟进行同步。EtherCAT时钟从2000-01-01零时开始,采用64位定时器,定时单位为ns,最大计时时间为500 a。在EtherCAT通信网络中,根据对分布时钟的支持情况,可以将从站分为3类:第一类为完全支持分布时钟;第二类为只支持传输延时测量;第三类为从站不支持分布式时钟。发射车控制系统的时间控制模块为第一类,模块能提供本地时钟,基于EtherCAT总线的XFC(extreme fast control technology)技术可以实现高速的信号采集和精确时间的输出响应[8-11]。
发射车控制系统的时间控制模块通道时间戳精度为10 ns+输入延迟,模块分布式时钟的精度<100 ns。2个通道分别接收指令收发系统的秒脉冲和车弹同步脉冲信号。正常情况(GPS或者北斗工作正常)下,时间控制模块在接收到秒脉冲后,记录分布式时钟的时间和卫星时间,比较连续记录的10个周期的分布式时钟的时间差,均正常的情况下,取第5个周期的分布式时钟和卫星的时间差作为分布式时钟转换为发射车绝对时间的差值,从而产生发射车绝对时间。当武器系统指定用内部定时(GPS或者北斗无法正常工作),时间控制模块记录第一个秒脉冲的分布式时钟的时间,以此时间作为内部定时的发射车绝对时间的零时刻。
导弹发射车时间对准系统用硬件计数器对同步秒脉冲信号进行计时,组合绝对时间数据和硬件计数器数据可得到当前精确时间,实现与武器系统之间的时间同步,精度可达到ms级。时间同步不依赖卫星、自成体系、自主性强、抗干扰能力强,不存在卫星系统被威胁带来的系统性风险。
1.3 定位定向控制
发射车控制系统控制GPS、惯导和码盘产生发射车的定位数据和发射架的航向数据。正常情况(GPS或者北斗、惯导和码盘工作正常)下,产生定位定向数据的流程如下所示:
a)通过串口通讯模块读取GPS产生的定位信息;
b)根据GPS数据形成寻北指令;
c)通过串口通讯模块向惯导发送寻北指令;
d)接收惯导定位定向数据,形成发射车定位和发射架定向数据;
e)在行军位置读取码盘位置和惯导位置;
f)发射架竖起后,利用行军位置读取的码盘位置和惯导数据,利用坐标转换形成发射架的航向。
异常情况(GPS、惯导和码盘工作不正常)下,定位定向控制系统结合HMI(人机接口)设备,利用人工辅助的方法产生发射车定位和发射架航向数据。避免由于单一设备的损坏,导致发射车无法工作。图1给出了发射车控制系统处理发射车定位数据和发射架航向数据的流程图。
图1 定位定向控制流程图
通过将惯导安装到发射架,结合惯导和角度编码器测量数据(角度测量频率提高到500 Hz,惯导测量频率一般为100 Hz)解算四元数的方法,发射车控制系统解决了惯导固有时漂特性和测量延时等因素影响航向测量精度的问题,实现了导弹在动态旋转基座下的快速对准,保证了导弹对准精度。
1.4 伺服系统控制
发射车控制系统接收到分配的火力通道中的目标数据后,对数据做如下处理:坐标变换、数据外推、通过α-β滤波后预测出目标当前方位角,与编码控制板采集到的当前发射架方位角度比较,调用PID控制算法,通过模拟量输出给方位驱动器,控制方位电机旋转,从而控制发射架旋转到目标位置,并实时进行目标位置跟踪,其工作原理框图如图2所示。
图2 发射架伺服控制原理框图
1.5 导弹控制
发射车控制系统在完成发射车架设、时间同步、导弹时序同步、空间对准、跟踪目标后,通过现场总线向发控箱发送控制指令和飞行任务信息,发控箱通过与导弹的通讯接口将控制指令和飞行任务信息转发给导弹。飞行任务信息主要包括目标位置(由于通讯周期的差异,给发控箱装订的目标的位置需要结合速度信息在3个方向上做线性外推)和速度、目标种类、发射车位置等有关信息。发射车控制系统配备与发控箱通讯的现场总线接口就可以实现控制导弹系统的控制功能。
2 控制系统实现
2.1 EtherCAT简介
EtherCAT是由德国BECKHOFF自动化公司于2003年提出的实时工业以太网技术。它具有数据率高、速度快、同步性能好(各从站节点设备可以达到小于1 μs的时钟同步精度)的特点,支持多种设备连接拓扑结构。EtherCAT支持多种设备连接拓扑结构为:线形、树形或星形结构,拓扑介质有100Base-TX标准以太网电缆或光缆[8]。
2.2 系统组成及介绍
对于倾斜发射、需要车体调平和发射架起竖、需要发射架跟踪目标的发射车来说,使用快速以太网全双工通信技术构成主从式的环形(线路冗余)结构的发射车控制系统,可以将以往多个计算机构成的发射车控制系统功能统一在一个基于EtherCAT的计算机上实现,图3为一个基于EtherCAT的发射车控制系统。
图3 发射车控制系统接口图
计算机分成2个部分:主站和从站,主站和从站之间通过环形网络实现线缆冗余。主站一般放置于车体机柜内,主站由CPU模块和不同种类(串口通信、开关量(PNP,NPN)、CAN通信)的EtherCAT模块组成。由于发射架上的工作环境相对于主站更恶劣,同时为了便于项目开发中的功能扩展,从站主要由不同种类(串口通信、开关量(PNP,NPN)、模拟量输出)的EtherCAT Box功能模块组成,开关量输入模块带时间戳功能,实现时间同步。
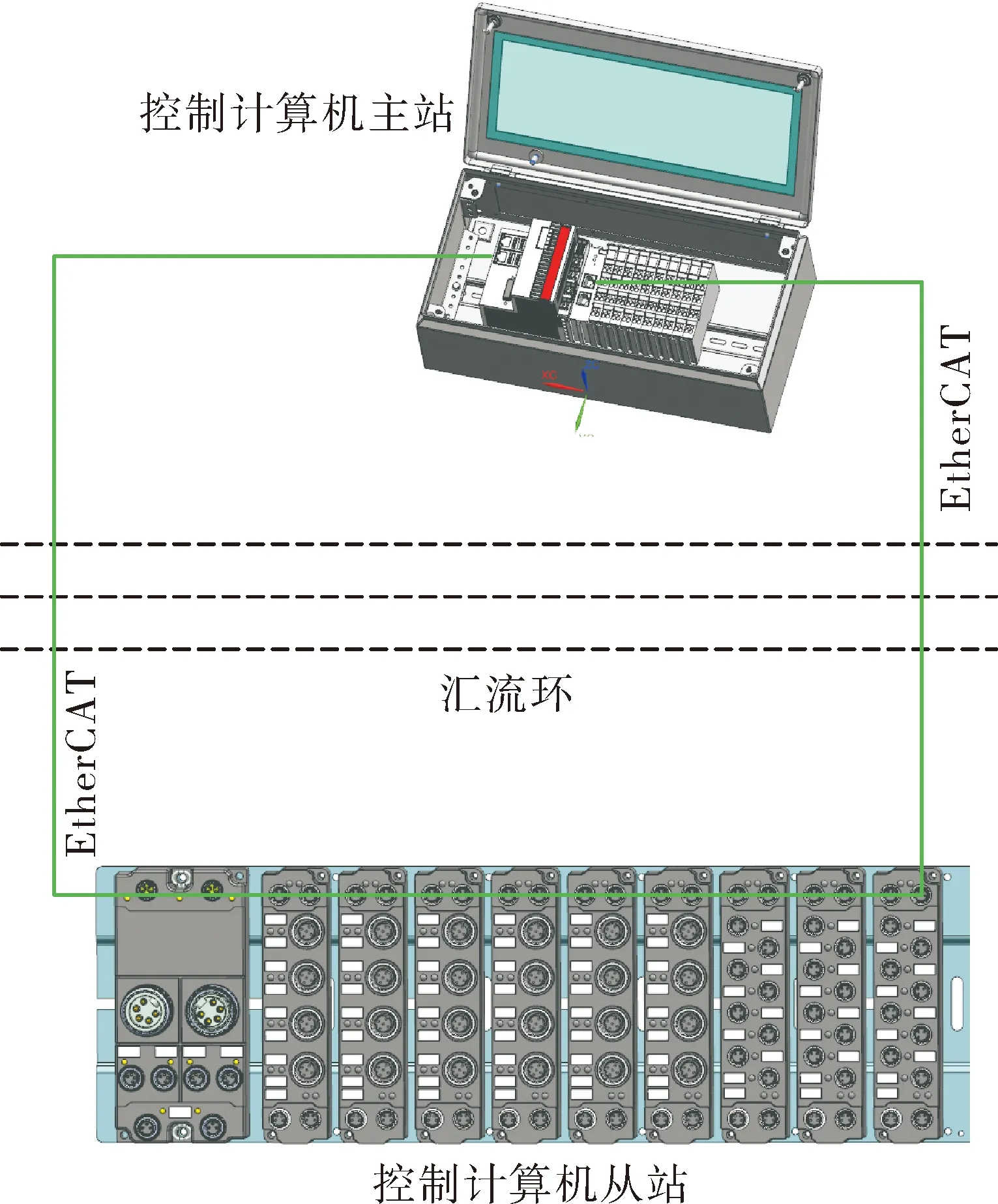
图4 控制系统实物
2.3 试验数据
2.3.1 车体调平控制数据
图5为发射车电液调平控制中车体倾角进入精调阶段后车体的倾角变化数据。通过数据可以看出,通过最高点不动,其它3点向最高点看齐的调平方法,在精调阶段,通过先调整纵摇角(车体前后,蓝色),再调整横滚角(车体左右,红色),可以有效的避免调整过程中互相耦合,快速完成车体调平。
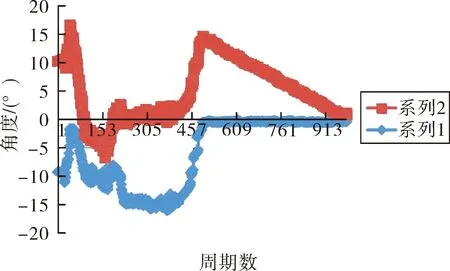
图5 电液调平过程倾角变化图
2.3.2 定向精度数据
发射架静止,记录惯导输出的航向角和利用码盘做坐标转换得到的发射架航向角(8 h,间隔20 min),图6为惯导数据(蓝色)和码盘经过坐标转换得到的发射架航向角(红色),惯导时漂造成的误差最大达到0.028°,对于车体调平的发射车,通过码盘坐标转换可以得到更高精度的航向角。
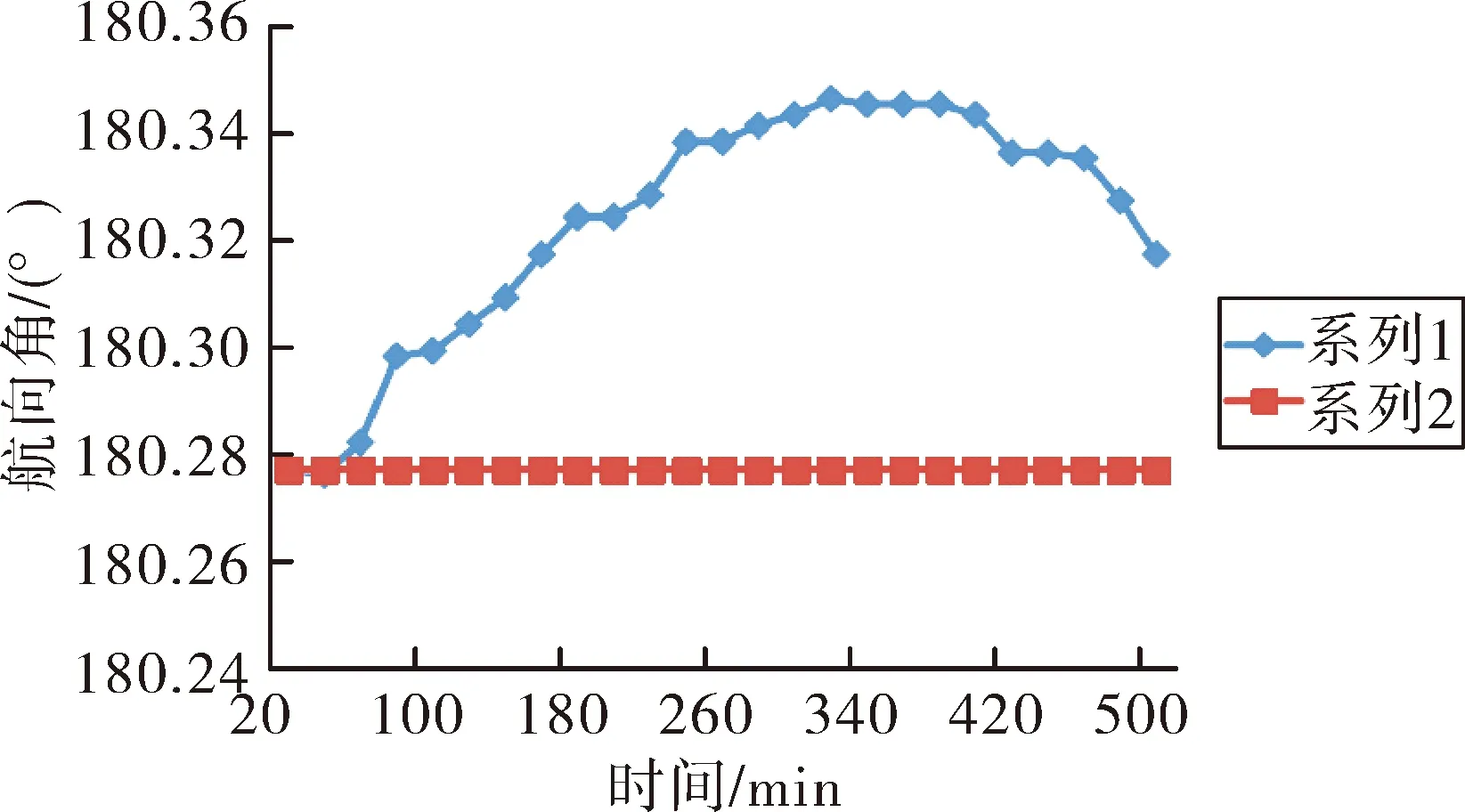
图6 惯导时漂测试
2.3.3 伺服系统跟踪精度数据
利用模拟直线航路(目标距离5 km、速度400 m/s)测试跟踪精度。图7中第一幅为转台跟踪时方位角(伺服角度)和给定的目标方位角(原始航迹)对比曲线,第二幅为跟踪误差,最大跟踪误差10 mil,满足武器系统要求。通过计算机辅助跟踪控制技术,实现了发射架快速、稳定跟踪目标。
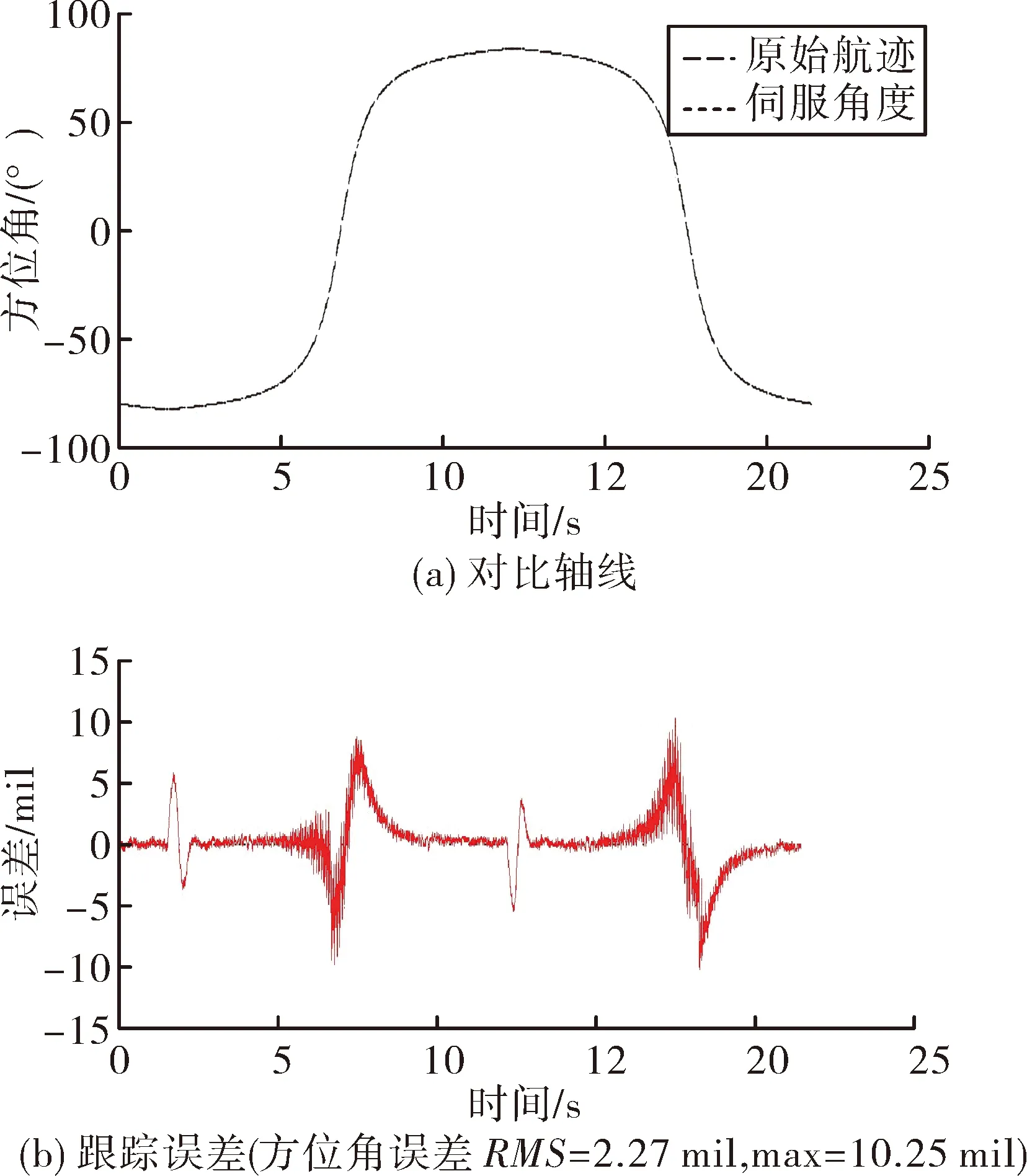
图7 伺服系统跟踪误差
3 结论
基于EtherCAT的导弹发射车控制系统可以实现控制发射车调平、控制发射架起竖、控制定位定向系统产生发射车定位定向信息、产生发射车时间基准、控制伺服系统跟踪目标、和武器系统指挥车交互数据、控制导弹系统和发射车安全联锁管理功能。试验结果表明:该系统具有实时性好、可靠性高、可扩展性强、项目间可继承性好等优点。
猜你喜欢
中国民间疗法(2021年5期)2021-06-09 09:21:08
装备维修技术(2020年17期)2020-12-28 09:40:27
机械工程与自动化(2020年4期)2020-08-25 02:06:58
国防科技工业(2020年1期)2020-01-16 07:03:28
测控技术(2018年2期)2018-12-09 09:00:56
森林工程(2018年4期)2018-08-04 03:23:38
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
军营文化天地(2017年7期)2017-09-25 07:43:44
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
航天工业管理(2017年4期)2017-05-12 01:16:35