
面向新一代智能交通系统的车联网仿真技术
2019-12-27 04:13陈艳艳贾建林范博陈宁刘懿祺吕璇
移动通信 2019年11期
陈艳艳 贾建林 范博 陈宁 刘懿祺 吕璇
摘要:车联网仿真技术是智能交通系统以及车联网领域发展的重要测试手段,然而,已有的车联网仿真平台基于固定模型构建业务场景,如车辆跟驰模型、静态业务优先级模型等,这种模型驱动的仿真方法难以适应新一代智能交通系统特征。因此,提出了一种数据驱动的车联网仿真技术,基于海量路网信息数据、动态学习和标定典型智能交通场景下的业务特征,为车联网仿真提供柔性动态的业务适配,满足新一代智能交通系统需求。
关键词:车联网;新一代仿真技术;模型驱动;数据驱动
doi:10.3969/j.issn.1006-1010.2019.11.011 中图分类号:TN929.5
文献标志码:A 文章编号:1006-1010(2019)11-0065-10
引用格式:陈艳艳,贾建林,范博,等. 面向新一代智能交通系统的车联网仿真技术[J]. 移动通信, 2019,43(11): 65-74.
Vehicle Network Simulation Technology for New Generation Intelligent Transportation Systems
CHEN Yanyan1, JIA Jianlin1, FAN Bo1, CHEN Ning1, LIU Yiqi1, LV Xuan2
(1. College of Metropolitan, Beijing University of technology, Beijing 100124, China;
2. Hebei Provincial Communications Planning and Design Institute, Shijiazhuang 050011, China)
[Abstract]
Simulation technology of Internet of Vehicles (IoV) is an important test method for the development of intelligent transportation systems and IoVs. However, the current IoV simulation platforms establish service scenarios based on fixed models, such as vehicle following model, static service priority model, etc. This model-driven simulation method is difficult to support the characteristics of the intelligent transportation system in new generation. Therefore, this paper proposes a data-driven simulation technology of IoVs. Based on massive information data from road network, dynamically learning and calibrating the service characteristics of typical intelligent traffic scenarios, the proposed simulation technology provides flexible and dynamic service adaptation for vehicle network simulation to meet the requirements of intelligent transportation systems in new generation.
[Key words]Internet of Vehicles; new generation simulation technology; model-driven; data-driven
0 引言
車联网技术的发展增强了汽车的智能化、信息化,提升了人们出行的便捷性、安全性与高效性,是传统交通向智能交通转变的重要环节[1]。新一代智能交通系统基于车路协同通信系统(C-V2X)以及车用传感技术、DSRC专用短程通信技术等,实现了线路规划、远程控制、协助驾驶、交通信息采集等功能,不仅保障了出行的安全性,还提供了及时的出行服务信息等[2-4]。
车联网的实质是一种移动自组织网络,与典型的MANET模型不同,具有可预判性,能够根据周围环境信息为在途车辆提供不同的功能服务。但是,由于车联网技术实验需要大量车辆及复杂风险场景的输入,导致室外实验难以安全、有效获取实验数据,在此背景下,为克服这些限制,车联网的实验研究大多依赖于仿真技术[5-7]。车联网仿真技术能够基于真实路网拓扑结构、精确微观移动模型和实际交通需求,模拟周边车辆及复杂环境,实现复杂环境下的交通仿真。
但是,随着“大数据”时代的到来,交通具有Volume(大量)、Velocity(高速)、Variety(多样)、Value(低价值密度)、Veracity(真实性)等特性,虽然模型驱动的车联网仿真技术在不断的发展优化,但不能以真实的方式描述车辆移动性,同时忽略了细微的车辆交互细节,如因车辆密度的改变导致的车速加减变化等。因此,模型驱动的仿真方法[8-10]难以支持新一代智能交通系统特征。而数据驱动的车联网仿真技术能提供多样、准确的车辆移动数据,并基于海量路网信息数据,使车联网仿真的精度提升到一个新高度,是未来车联网仿真发展的重要趋势。
基于上述背景,本文从车联网仿真平台的发展历程出发,首先概括目前车联网平台的主要分类并介绍集中典型的车联网仿真平台;其次,结合中外文献对仿真平台所运用的模型进行研究分析;最后根据网络以及车联网发展的现状,提出车联网仿真技术发展的新思路。
1 车联网仿真发展历程
1.1 车联网仿真平台分类
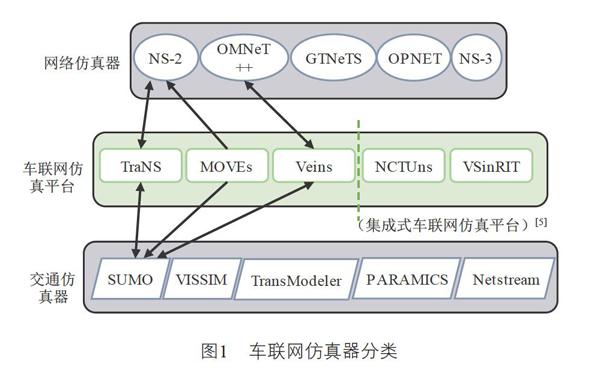
车联网仿真需要两种类型的仿真组件:网络组件(网络仿真器)和移动性组件(交通仿真器)。在大多数情况下网络和交通仿真器是分开的,但也会出现结合两者,可以独立运行的集成式车联网仿真平台。车联网仿真的分类结构图如图1所示。
交通仿真器生成所需要的现实车辆移动轨迹,作为网络仿真器的输入。网络仿真器模拟无线网络中的信息传输环境和网络模型,如所有节点(汽车)的网络拓扑结构、发送和接受数据包、数据流量传输或信道等[11]。
1.2 仿真平台介绍
目前使用的车联网仿真软件所得到的仿真结果很大程度上受到其所选择的模型影响。现存车联网仿真平台主要有:
(1)TraNS
TraNS(Traffic and Network Simulation Environment)基于Java应用程序,通过链接SUMO交通仿真器以及NS2网络仿真器,构建了更加真实的仿真环境,实现了SUMO与NS-2间动态信息的实时交互,是第一个开源的VANET仿真框架[12-13]。该仿真平台具有提取车辆移动轨迹、地图裁剪和场景重新缩放(仅适用于TIGER地图)、大规模模拟(最多可测试3 000辆车)等功能。TraNS平台有两种操作模式分别为:以网络程序为中心的模式和以应用程序为中心的模式,其体系结构如图2、图3所示,每种模式都满足了特定的需求。其一,借助网络程序,评估车辆节点的实时移动性;其二,借助应用程序,评估交通仿真運行期间的车辆行为。此外,TraNS可通过TraCI来耦合交通仿真器以及网络仿真器,在网络模拟器中实现停车、换道、改变速度等功能,体现了应用逻辑模块与驾驶员行为模型模块交互。
(2)MoVES
MoVES(Mobile Wireless Vehicular Environment Simulation)仿真平台基于微观仿真和网络仿真为车联网的研究提供了平台,该框架可实现模块化,具有适应性和准确性特点。在MoVES发展过程中,第二代框架是在第一代的基础上实现了自适应计算,提高了仿真框架的可扩展性[12]。同时,该平台使用并行式和分布式仿真器进行建模,解决了车辆自组织网络(VANET)和ITS应用的结合。MoVES体系架构如图4所示[11],共有三层:1)应用层;2)车辆层;3)网络层。其中车辆层包括车辆模型、驾驶员行为模型、GPS地理信息系统、信号控制系统等。网络层包括信息传播模型、网络协议等。
(3)Veins
Veins仿真平台是基于开源框架[13-15]设计的,提供了耦合网络的仿真。网络仿真器基于OMNeT++开发,处理速度快,可以用于处理大型交通仿真。Veins通过双向耦合的方法,可以实现道路网与信息控制系统的耦合,实现仿真器之间的动态交互[16],进而可以模拟车联网通信对道路交通的影响。Veins的耦合仿真框架如图5所示。
(4)NCTUns
NCTUns仿真平台是一种网络模拟仿真器,能够模拟有线和无线IP网络的各种协议,具有较强的可视化效果,可以模拟802.11a、802.11b、802.11g和802.11p技术[17-18]。该平台由图形用户界面(GUI environment)、模拟引擎(simulation engine)、协议模块(protocol modules)、模拟任务调度器(simulation job dispatcher)、任务协调器(coordinator)、内核修改(modified kernel)、协议守护程序(protocol daemons)、真实的应用程序(real-life application programs)八个功能部分组成[19]。与TraNS等仿真软件不同,NCTUns可以将流量和网络仿真器集成在一个模块中,并提供反馈意见,支持车载网络仿真。
(5)VSimRTI
VSimRTI是由德国柏林理工大学和克莱斯勒股份公司联合创建的戴姆勒汽车信息技术创新研究所(DCAITI)开发的VANET仿真框架。VSimRTI采用了IEEE标准定义的建模与仿真高层体系结构,实现了多个模拟器之间的同步和通信。利用VSimRTI提供的网络模拟器、交通模拟器、环境模拟器、应用模拟器接口,可以对车辆网络的数据通信方案与算法协议进行充分评估。
2 模型驱动下的车联网仿真
2.1 移动模型
在车联网仿真中,移动模型的准确性影响了车联网仿真精确性及其设计性能[20-22]。仿真中节点(车辆)的移动会显著影响网络拓扑结构,因此精确的车辆移动模型可以提升车联网仿真的置信度[23]。因此,车联网移动模型成为目前研究的重点。
(1)交通流刻画模型
根据刻画对象的不同,可以将交通流刻画模型分为宏观、微观和介观三方面,具体分类结构如图6所示。宏观交通流模型针对交通量和初始车辆分布进行建模,并借鉴流体动力学理论,描述交通流总体特征。微观移动模型将每一车辆作为独立单元进行研究建模,可以获得车辆的位置、速度、加速度等信息,反应了车辆之间的运动关系。微观移动模型包括了车联网仿真中常用的跟驰模型和换道模型,其中跟驰模型可准确反应真实交通现象、捕获交通扰动影响、再现交通拥堵场景;换道模型可评估车辆换道情况并进行安全评价。介观模型是宏观移动模型和微观移动模型间的折中方法。
(2)移动条件限制模型
根据移动模型在仿真中的条件限制以及移动特性,将移动模型分为随机移动模型[24]、受限移动模型[25]以及混合移动模型[26],分类结构如图7所示。随机移动模型是最简单直观的移动模型,描述了移动网络节点在二维区域内运动的行为,车辆随机选择目标点,其速度、运动方向也都随机产生。但由于该模型为节点不均匀分布模型且不能描述群组移动,因此产生的仿真结果偏差较大,很少应用在车联网仿真中。受限移动模型根据受限对象不同分为:时间条件移动模型,前一时刻的运动状态(如速度、加速度等)会对当前移动产生影响;空间条件移动模型,节点的运动状态与周围节点密切相关,节点会受到邻近节点的影响;地理条件移动模型,即为了模拟更真实的场景,在该模型里节点移动受到地图中各种障碍物的限制。混合移动模型则是受限移动模型间相互组合形成的模型。
(3)真实轨迹移动模型
该模型在考虑了道路拓扑结构、速度控制等条件,进一步从模型、车辆真实行驶轨迹方面获取节点运动数据并反应在车联网仿真中,能够较好地模拟车辆在真实环境中的行为。文献[27]通过收集北京的出租车GPS数据,建立了基于真实轨迹的移动模型。文献[28]通过获取具有Wi-Fi网卡的公交车移动数据,生成节点的合成轨迹,然后建立仿真模拟。虽然真实轨迹移动模型能再现车辆的真实移动性及相互关系,但仿真性能比现有的其他移动模型要低,这是由于可利用轨迹数据少,不能全面反映道路车辆移动状态所导致的。
2.2 驾驶员行为模型
在车辆网仿真中,驾驶员行为的模拟和仿真的精度有密切的关系,是人车系统、智能车辆系统的关键。目前研究多基于驾驶数据,例如制动、油门踏板位置和方向盘角度等控制角度出发,提出了驾驶员行为的建模方法。驾驶员行为模型的建立可分为以下三个步骤[29]:
(1)驱动模型
建立基于驾驶员行为识别驾驶参数的模型结构,根据驾驶员模型结构的确定性和不确定性,从不同识别角度将识别方法分为参数识别、非参数识别和半参数识别三方面。驱动模型中包括了安全距离或碰撞避免模型(CA)、线性模型(Helly)以及基于模糊逻辑的模型、傅立叶系数法(FCM)等模型和数学方法。
(2)识别驾驶员行为特征
模型确定后,采用多种数学方法进行建模描述驾驶任务如跟驰、换道等,进而对驾驶行为识别。目前常用的驾驶行为识别方法有高斯混合模型(GMM, Gaussian Mixed Model)、过程混合模型(DPM, Dirichlet Process Mixture)、多层感知人工神经网络(MLP-ANN, Multilayer Perceptron-Artificial Neural Network)、非线性和模糊理论等。
(3)基于驱动模型的评估与验证
为了提高车辆动力学性能,设计智能化的驾驶员系统,需要评估和检验驾驶员行为模型的准确率,尤其在车联网仿真系统领域。目前,大多数驾驶员行为模型从物理、数学理论角度出发,将通过驾驶参数分析得到模型放入仿真器中以识别驾驶员在某些驾驶任务(换道、跟车、制动等)中的驾驶行为、技能或状态,但很少讨论驾驶员心理和生理因素对驾驶员行为模型产生的影响[30]。然而目前车联网平台正处于向自动驾驶过度的阶段,人-车系统中人的主观意愿、行为将对驾驶产生决定性的影响。因此,研究人员将驾驶员行为模型研究应重点放在驾驶员心理、生理的研究上。
3 数据驱动下的车联网仿真
3.1 模型驱动存在的不足
目前,在车联网仿真高保真度的研究中,大多数研究都是基于提升仿真模型的精确度。但是在现实中,存在着车联网网络拓扑结构的随机性、驾驶人员的主观认知以及交通流变化的随机性等因素,上述模型在车联网仿真中的运用具有较大局限性[31]。
(1)移动模型现存问题
目前,移动模型在车联网仿真的应用仍然存在很多不足之处。文献[32]指出,移动模型的流動性设置是把双刃剑,如果节点快速移动,虽然能提升与其他节点的汇合以及信息交换,但同时也会减少接触时间,从而限制在节点联系中交换捆绑包的数量,限制数据传输。文献[33]中说明,在针对不同场景使用移动模型时,都需要手动调整不同模型的参数以适应当前情景的网络拓扑、移动限制条件等,使车联网仿真的工作量变大。文献[34]通过实验证明,当使用曼哈顿模型车辆遇到障碍时,为了防止车辆重叠,将车辆速度瞬时降为零,这与实际情况有较大差异。此外,部分移动模型的节点存在非均匀分布现象。节点移动趋势是向中心移动的,依赖于节点的运动参数,产生边界效应,因此产生的仿真结果偏差较大。移动模型随着研究的深入在不断的改进和发展,但由于车辆移动存在实时性,交通流存在地域性,驾驶员驾驶存在主观性,因此车辆网移动模型在模拟逼真的移动节点时仍面临很大的挑战。
(2)驾驶员行为模型现存问题
对于驾驶行为模型来说,驾驶汽车实际上是一项复杂的、动态的任务,要求驾驶员不仅要对驾驶员自身技能、驾驶员状态、车辆性能和交通信息做出准确的认知和判断,还要迅速反应、处理这些信息。因此,Liu和Salvucci[35]指出,驾驶员行为模型应该考虑到高级的认知处理和低级操作控制的特征。准确识别驾驶员行为、减轻驾驶员工作量并提高主动车辆安全系统对于车联网仿真未来的发展是十分必要的。Macadam[36]从人类行为活动角度出发,指出人类具有非线性时间延迟和局限性的特征,但在人为因素领域仍存在一些物理限制。此外,目前现有的模型、系统大都是根据驾驶员的平均指标设计的,很少考虑驾驶员的个人特征。但在现实中,往往是具有个体特征的驾驶员的驾驶行为会影响道路交通的有序性以及个体车辆的安全性。因此,运用在现有车联网仿真中的驾驶员行为模型,对驾驶员行为识别的敏感度、速度以及准确度都尚存在很大的提升空间。
3.2 数据驱动下的仿真建模思路
(1)新数据源的驱动
随着通信技术、计算机技术的发展,物联网、互联网、车联网(车路协作)快速形成并广泛应用,使交通系统进入智能网联时代,人、车、路、环境、云端得以相连,智能网联时代带来的时空大数据,使得我们获得海量移动运营商数据、交通数据等。以往的交通出行、管理受到传统数据、模型及计算能力的局限制约,大数据的到来以及共享使我们能够深入了解交通需求及供给(设施及服务)能力,并了解实时的交通现状,这也是是构建并运行综合交通网络的前提。
目前,浮动车、手机、IC卡、众包、网络签到等时空大数据实现交通系统全息监测,也可以将这些功能、数据应用到车联网仿真中去,采用基于场景拆分和离散事件的在线精确仿真技术将整个复杂连续仿真场景拆分为多个简单离散仿真场景,降低仿真复杂度,减少仿真时间。此外,可以通过视频摄像头提取车辆在面对拥堵等简单场景时的行为和选择,形成大数据场景库,直接应用于仿真中,提高仿真精确度等。以下是车联网仿真中大数据的三个应用方向:
1)出行轨迹监测——获取真实交通流量
传统的车联网仿真中[37],利用目标场景和人口统计信息来确定适当的出行OD,运用路由分配算法来确定出行路径,模拟代表性的交通流量。而大数据时代,可以基于手机信令数据提取用户出行轨迹数据、分析用户时空轨迹挖掘用户时空出行特征,由此我们可以得到精确的用户出行OD、出行路径以便获取真实的交通流量信息,能更好地描述不同区域的出行形态(如图8所示的向心现象、局部聚集现象以及潮汐现象)。
2)浮动车数据、交通流检测——获取实时路网信息及短时预测
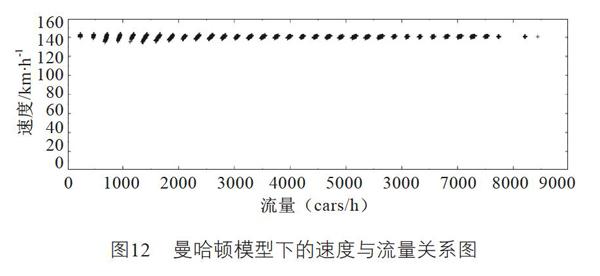
交通流模型、随机移动模型等常被用于车联网仿真中,以获取车辆速度、密度、流量等关系。随着数据的共享,检测技术的发展,我们可以通过交通流检测获得实时的车速、交通量、占有率等信息,即实现道路流量监测,如图9至图12所示。通过浮动车数据实时感知、估计道路网通行能力并动态控制进入流量,并将这些数据通过接口带入到车联网仿真中,提升了仿真的逼真度。
3)车辆事故数据、多数据源——获取个体车辆数据
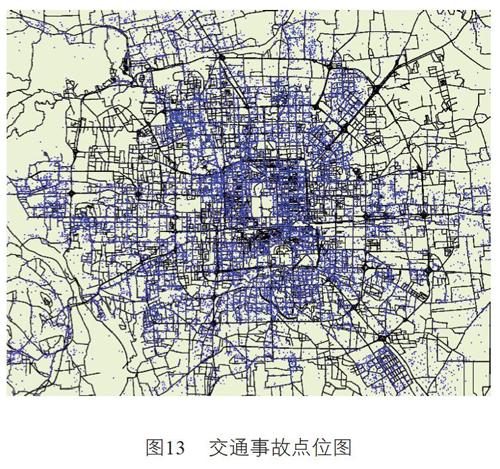
大数据背景下,可以结合高精度地图和精准定位,将通过车道及个体车辆监控所获得的数据接入车联网仿真中,减少随机事件影响,使节点保持适宜速度稳定行驶,准确仿真车流速度差及不良的变道行为,也可以实现基于多源数据的车辆运行状态安全诊断和实时预警。此外,还可以获得驾驶行为、车辆性能以及事故数据(如图13所示),相对于通过传统仿真模型,通过该方式获得上述数据可信度更高。
综上所述,大数据和5G时代的到来,为车联网仿真的发展提供了新机遇,推进了车路协同系统的建设,适应了新一代智能交通系统的需求。在传输能力上,传统的车联网数据为单向传输,后台汇聚,存在信息不对称、传输宽带及速度有限等问题。而智能交通条件下,数据双向传输,信息共享、对称,使多方合作机制的形成成为可能,传输速度也大幅提升。在决策能力上,传统车联网采用模型驱动的预案式调控决策,智能交通背景下采用数据驱动的决策模型能够更加精细刻画出行行为,为出行决策提供依据。
(2)数据驱动的仿真建模思路
传统的数据来源主要是路上安装的各类检测器,如地埋式感应线圈、超声波和激光检测器、视频等。这些数据的主要缺陷是覆盖量小以致数据不能很好地反映路网全面的真实情况,这使得传统建模方法多为model to data,这是在考虑到当时的数据现实状况之下的无奈之举。随着实时传感设备的普及,大数据已经成为目前各领域的必争之地,数据量陡增,数据形式的不断丰富使得交通仿真建模也开始发生相应的改变,由原来model to data变为data to model。
将大数据方法与数学模型相结合的思路将成为仿真科学发展的一个新机遇。构建数据驱动的仿真应用系统需要涵盖多个组成部分,包括数据需求、数据采集、数据传输、数据耦合、模型校正等。因此,基于上述大数据带来的新机遇,可以将数据驱动仿真框架梳理如图14所示。通过各种感知设备获取相应的大数据源,进行数据质量处理,得到合理有用的數据源。进而采用新的数据源结合新的方法如深度学习等构建交通仿真模型,并对各个参数进行校正,进而实现数据驱动下的仿真建模过程。
4 结束语
伴随着网络技术的发展,以人车路环境的全面精准感知及智能决策为核心,通过人—车—路互联与协作,构建的可实现协同管控与创新服务的智能网联交通系统成为交通发展的主要方向。车联网仿真是该系统从理论研究到应用实践的重要环节,因此,在过去的十年中,许多有关车联网仿真的研究已在世界各地开展。本文中将车联网仿真平台划分为交通仿真器、网络仿真器以及集成仿真器三个部分,并介绍了几种经典的仿真软件及平台。然后,分析归纳了当前主流的、能对车联网仿真精度产生重要影响的交通仿真模型,并结合国内外文献从节点移动、驾驶行为、网络传输等方面分析了三类仿真模型存在的不足。最后,根据网络发展以及车联网仿真研究现状提出了以大数据源为基础的车联网仿真发展方向,下一步应重点着手于大数据车联网仿真的测试与优化。
参考文献:
[1] E K Lee, M Gerla, G Pau, et al. Internet of Vehicles: From intelligent grid to autonomous cars and vehicular fogs[J]. International Journal of Distributed Sensor Networks, 2016,12(9).
[2] S Zeadally, R Hunt, Y S Chen, et al. Vehicular ad hoc networks (VANETS): status, results[J]. Telecommunication Systems, 2012,50(4): 217-241.
[3] F Batool, S A Khan. Traffic estimation and real time prediction using adhoc networks[C]//Emerging Technologies, Proceedings of the IEEE Symposium on. IEEE, 2005.
[4] I Leontiadis, C Mascolo. GeOpps: Geographical Opportunistic Routing for Vehicular Networks[C]//2007 IEEE International Symposium on a World of Wireless, Mobile and Multimedia Networks. IEEE, 2007.
[5] 王润民,邓晓峰,徐志刚,等. 车联网仿真测试评价技术研究综述[J]. 计算机应用研究, 2019,36(7): 1921-1926+1939.
[6] N Akhtar, S C Ergen, O Ozkasap. Vehicle Mobility and Communication Channel Models for Realistic and Efficient Highway VANET Simulation[J]. IEEE Transactions on Vehicular Technology, 2015,64(1): 248-262.
[7] S Zeadally, R Hunt, Y S Chen, et al. Vehicular ad hoc networks (VANETS): status, results[J]. Telecommunication Systems, 2012,50(4): 217-241.
[8] 邹智军. 新一代交通仿真技术综述[J]. 系统仿真学报, 2010,22(9): 2037-2042.
[9] D R Choffnes, Bustamante, E Fabián. An integrated mobility and traffic model for vehicular wireless networks[C]//International Workshop on Vehicular Ad Hoc Networks. DBLP, 2005.
[10] J J Blum, A Eskandarian, L J Hoffman. Challenges of intervehicle ad hoc networks[J]. IEEE Transactions on Intelligent Transportation Systems, 2004,5(4): 347-351.
[11] S Olariu, M C Weigle. Vehicular networks: from theory to practice[M]. USA: Chapman and Hall/CRC, 2009.
[12] M Piórkowski, M Raya, A Lezama Lugo, et al. TraNS: Realistic Joint Traffic and Network Simulator for VANETs[J]. Acm Sigmobile Mobile Computing & Communications Review, 2008,12(1): 31-33.
[13] D Eckhoff, M Protsenko, R German. Toward an Open Source Location Privacy Evaluation Framework for Vehicular Networks[C]//Vehicular Technology Conference. IEEE, 2014.
[14] C Sommer, R German, F Dressler. Bidirectionally Coupled Network and Road Traffic Simulation for Improved IVC Analysis[J]. IEEE Transactions on Mobile Computing. IEEE, 2011,10(1): 3-15.
[15] H Noori. Realistic urban traffic simulation as vehicular Ad-hoc network (VANET) via Veins framework[C]//2012 12th Conference of Open Innovations Association (FRUCT). IEEE, 2012.
[16] R Protzmann, K Mahler, K Oltmann, et al. Extending the V2X simulation environment VSimRTI with advanced communication models[C]//ITS Telecommunications (ITST), 2012 12th International Conference on. IEEE, 2012.
[17] 王雷. NCTUns:一種新的网络模拟技术[J]. 计算机技术与发展, 2008,18(7): 80-82.
[18] S Y Wang, Y B. Lin NCTUns network simulation and emulation for wireless resource management[J]. Wireless Communications & Mobile Computing, 2005,5(8): 899-916.
[19] S Y Wang, H T Kung. Simple methodology for constructing extensible and high-fidelity TCP/IP network simulators[C]//INFOCOM ‘99. Eighteenth Annual Joint Conference of the IEEE Computer and Communications Societies. Proceedings. IEEE, 1999.
[20] J Harri, F Filali, C Bonnet. A framework for mobility models generation and its application to inter-vehicular networks[C]//International Conference on Wireless Networks. IEEE, 2016.
[21] 唐蕾,段宗涛,康军,等. 面向车联网环境的车辆移动模
型研究进展[J]. 长安大学学报:自然科学版, 2016,36
(5): 67-78.
[22] 顾海燕. 车联网环境下高速公路车辆跟驰模型及仿真研究[D]. 南京: 东南大学, 2017.
[23] 石丛军,任清华,郑博,等. MANET节点移动模型仿真研究[J]. 计算机工程, 2009,35(14): 101-103.
[24] C Bettstetter. Smooth is Better than Sharp: A Random Mobility Model for Simulation of Wireless Networks[C]//Acm International Workshop on Modeling, Analysis, and Simulation of Wireless and Mobile Systems (MSWIM). ACM, 2001.
[25] C Bettstette, C Wagner. THE SPATIAL NODE DISTRIBUTION OF THE RANDOM WAYPOINT MOBILITY MODEL[C]//Mobile Ad-hoc Netzwerke, Deutscher Workshop ?ber Mobile Ad-hoc Netzwerke Wman. GI, 2002.
[26] T Islam, Y Hu, E Onur, et al. Realistic simulation of IEEE 802.11p channel in mobile Vehicle to Vehicle communication[C]//Microwave Techniques (COMITE), 2013 Conference on. IEEE, 2013.
[27] Y Weidong, L Jizhao, Z Xinyun. an trace based vehicular mobility model for simulation of vehicular delay tolerant networks[C]//Symposia & Workshops on Ubiquitous. IEEE Computer Society, 2010.
[28] X Zhang, J Kurose, B N Levine, et al. Study of a bus-based disruption-tolerant network: mobility modeling and impact on routing[C]//International Conference on Mobile Computing & Networking. DBLP, 2007.
[29] W Wang, J Xi, H Chen. Modeling and Recognizing Driver Behavior Based on Driving Data: A Survey[J]. Mathematical Problems in Engineering, 2014(1): 1-20.
[30] C Miyajima, Y Nishiwaki, K Ozawa, et al. Driver Modeling Based on Driving Behavior and Its Evaluation in Driver Identification[J]. Proceedings of the IEEE, 2007,95(2): 427-437.
[31] 程航. 基于車辆实际数据的车联网仿真平台的研究与开发[D]. 广州: 广东工业大学, 2016.
[32] L Peien, H Hongyu, S Wei, et al. Performance Evaluation of Vehicular DTN Routing under Realistic Mobility Models[C]//Wireless Communications and Networking Conference. IEEE, 2008.
[33] F J Ros, J A Martinez, P M Ruiz. A Survey on Modeling and Simulation of Vehicular Networks: Communications, Mobility, and Tools[J]. Computer Communications, 2014,43(1): 1-15.
[34] H?rri Jér?me, M Fiore, F Filali, et al. Vehicular mobility simulation with VanetMobiSim[J]. SIMULATION: Transactions of The Society for Modeling and Simulation International, 2011,87(4): 275-300.
[35] A Pentland, A Liu. Modeling and Prediction of Human Behavior[J]. Neural Computation, 1999,11(1): 229-242.
[36] Macadam, C Charles. Understanding and Modeling the Human Driver[J]. Vehicle System Dynamics, 2003,40(1-3): 101-134.
[37] S Uppoor, O Trullols-Cruces, M Fiore, et al. Generation and Analysis of a Large-Scale Urban Vehicular Mobility Dataset[J]. IEEE Transactions on Mobile Computing, 2014,13(5): 1061-1075. ★
猜你喜欢
价值工程(2016年35期)2017-01-23
软件(2016年4期)2017-01-20
科技创新与应用(2016年34期)2016-12-23
青春岁月(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
电脑知识与技术(2016年17期)2016-07-23
商(2016年8期)2016-04-08
科技视界(2016年1期)2016-03-30
商(2016年4期)2016-03-24
