
V2X商用进程中面临的测试挑战及关键技术
2019-12-27 04:13韩庆文曾令秋雷剑梅刘杰
移动通信 2019年11期
韩庆文 曾令秋 雷剑梅 刘杰

摘要:随着V2X商用进程的推进,建立合理有效的测试评价体系的需求已日益明确,V2X测试涉及跨行业融合,通信行业与车辆行业的测试思路与测试方法差异较大,目前尚缺乏权威测试认证体系。将从通信测试和车载应用测试两个方面入手,分析V2X商用进程中面临的测试挑战,以及目前在外场测试和暗室测试中发现的瓶颈问题,以之为基础,对V2X测试认证体系构建中面临的关键技术进行分析,设计了一种面向V2X性能和功能的暗室内测试方案,该测试方案能够输出通信性能参数和应用响应结果,经过验证性测试,证明了该方案的有效性。
关键词:车联网;测试认证;暗室;通信测试;应用测试
doi:10.3969/j.issn.1006-1010.2019.11.005 中图分类号:TN92
文献标志码:A 文章编号:1006-1010(2019)11-0028-08
引用格式:韩庆文,曾令秋,雷剑梅,等. V2X商用进程中面临的测试挑战及关键技术[J]. 移动通信, 2019,43(11): 28-35.
Challenges and Key Technologies for Testing and Certification in V2X Commercialization
HAN Qingwen1, ZENG Lingqiu1, LEI Jianmei2, LIU Jie2
(1. Chongqing University, Chongqing 400044, China;
2. China Automotive Engineering Research Institute Co., Ltd., Chongqing 401122, China)
[Abstract]
With the development of V2X commercialization, the need to establish a reasonable and effective testing and certification system has become increasingly clear. V2X testing process requires cross-industry cooperation, where communication industry and vehicle industry have different ideas about testing and certification, and thus it is difficult to establish an authoritative testing and certification system. From the aspect of communication and vehicle application testing, this paper analyzes the testing challenges of V2X commercialization and the bottlenecks in both field and darkroom testing. Based on this, the key technologies in the V2X testing and certification system are analyzed, and then a darkroom testing solution is designed for V2X performance and function. It can output communication performance parameters and application response results, and the effectiveness is validated by verification testing.
[Key words]connected vehicle; testing and certification; chamber; communication performance test; application test
0 引言
隨着智能网联汽车商用化进程的推进,车载系统复杂度越来越高,必须在商用前进行有效测试。智能网联汽车包含两个方面的技术,即智能化和网联化[1],究其内涵,智能化和网联化分别属于两个不同的学科领域,智能化侧重于AI算法及车辆控制,而网联化则侧重于车辆信息交互管道问题,而无论智能化还是网联化,都需以车辆为载体,因此其产业化进程必须建立在多学科理解融合的基础上。
测试认证问题是智能网联汽车产业化进程中一个无法回避的关键问题[2],自智能网联汽车的概念提出以来,不同行业对于其测试认证方法便存在认知差异。汽车行业的测试关注的是应用响应表现,而通信行业的测试则关注通信质量,包括丢包率、吞吐量等参数的测试,两种测试理念的差异导致智能网联汽车测试认证体系的建立困难。
自汽车向智能化发展起,各大汽车厂商采用的测试方法无外乎两种,即在环混合虚拟仿真测试和道路测试[3],在环测试简单,可重复性好,测试成本低,但测试结果可靠性存疑;道路测试能够反映智能驾驶系统的实际工作表现,但测试周期长,场景有限,效率较低,且故障不可再现,可重复性差,以上各种原因使得各大汽车厂商对测试结果信心缺乏,但并无更好的解决方案,因此在V2X测试中沿用了智能驾驶系统的测试方法,即采用在环测试和道路测试[4]。但随着通信模块的引入,故障原因更加复杂,各大汽车厂商缺乏相应的故障诊断能力,对基于V2X的各类应用缺乏信心,目前并无一家汽车厂商对V2X模块开放控制接口。
由此可见,如要将网联信息引入智能驾驶决策,必须为汽车厂商提供有信心的测试方式,并构建完整的测试评价体系,否则将不会有实际意义上的智能网联汽车面市。
本文将从应用测试和通信性能测试两个方面入手,分析目前智能网联汽车测试中存在的问题及挑战。
1 智能网联汽车测试挑战
从模块角度来看,影响智能网联系统表现的因素有三个,即通信表现、控制表现和机械响应表现,这三个方面的问题最终都会体现为应用响应故障。按照汽车行业传统,测试应面向应用展开,为此SAE定义了多种面向智能网联系统的典型应用,如前撞告警(FCW, Forward Collision Warning)、路口辅助(IMA, Intersection Moving Assistant)等,各大车企也根据行业习惯制定出了相关应用规范,例如长安汽车就根据需求拟定了52种应用,这些应用基本涵盖车辆行驶过程中可能遭遇的各种极端场景。在2016年TIAA&FuTURE发布的《智能网联汽车基本应用白皮书》[5]中,将智能网联汽车相关应用场景和需求分为了三大类,即交通安全类(Safety)、交通效率类(Traffic Efficiency)以及信息服务类(Infotainment/Telematics),涉及到的通信方式主要包括车—车(V2V)、车—基础设施(V2I)、车—行人(V2P)以及车—网络/云平台(V2N/V2C)。
尽管车企对给予V2X的应用已有明确定义,但却并无成熟的测试方案,下面将从外场应用测试和通信测试两个方面分析智能网联汽车测试中存在的问题。
1.1 应用测试
车企关注应用表现,因此非常重视应用测试,并以之为目的推出了测试方法,包括硬件在环测试和外场测试,在过去的几年中,研究人员和测试机构开发了道路外场测试方案,全球范围内出现了大量的道路测试场地,如美国密歇根州的Mcity[6]、中国重庆的I-VISTA、中国上海的国家智能网联汽车示范区和瑞典的AstaZero等,近两年,国内各种示范区和道路测试场更加快速涌现,但测试手段和测试方法却很单一。
从2014年至今,美国NHTSA发布了多个V2X車载应用测试报告,定义了详细的V2X车载应用测试流程和测试评价方法,如定义了九种FCW测试流程[7]和十种ICV测试流程,分别根据TTC值和TTI值确定测试是否测试通过,典型FCW测试如图1所示:
如图1所示,HV的初始位置与RV之间的距离为140 m,RV驻停,HV以20 m/s(72 km/h)的速度向RV方向行驶,当HV触发FCW告警,或HV与RV的TTC下降到TTCmin的90%以下时仍无FCW告警触发,认为该次测试结束。
虽然大部分的汽车企业对外场应用测试表现出强烈的兴趣,但是该类测试结果往往缺乏信心,主要原因在于故障不可再现,如某次测试发现响应失败,但下一次测试时却响应正常,对于失败响应无法进行故障追踪和诊断。另外,目前尚无明确的测试次数要求,即无法判定究竟测试多少次响应成功即表示测试通过。
SAE给出的测试重复次数定义如式(1)所示[8]:
(1)
式中SS为测试样本次数,Z为可靠性指标要求,p为先验概率,c为置信区间。SAE2945对正确接收率(Z)的要求为90%,假设置信区间为5%,先验概率为0.5,可计算获得测试样本次数为81,即表示要达到90%的正确接受率即需进行81次重复测试。如采用外场测试方式,则将耗费大量的时间和测试成本,且由于测试过程可能收到外界不可预测因素,如电磁干扰、同频干扰等的影响,可能导致测试结果无效,即无法通过外场应用测试验证V2X应用功能可靠性。
1.2 通信测试
2009年美国DOT发布了DSRC链路测试报告,定义了5类测试场景,列举如下:
(1)面向V2I的DSRC静态链路场景;
(2)面向V2V的DSRC静态链路场景;
(3)DSRC链路仰角场景;
(4)DSRC动态链路场景;
(5)DSRC干扰场景,包括V2I和V2V。
以上测试场景均基于外场测试建立,测试性能参数为丢包率。
随着C-V2X技术的演进,中国通信标准化协会编制了一系列面向C-V2X终端的实验室测试规范,包括性能测试和功能测试,基本性能测试配置如图2所示:
其中信道模拟仪可根据需要模拟无线信号的多径传播,支持传播信道相关性、多径衰落、传播时延的设置,测试参数为端到端时延和包递交成功率。
图2所示测试方法仅面向车载V2X模组和零部件,缺乏整车级测试方法,因此需以之为基础进行完善,拓展整车级测试方法。
1.3 测试挑战
从目前来看,无论是外场应用测试方案还是实验室内通信性能测试方案,都无法全面支撑网联功能车辆的测试认证评价,这将严重影响网联类应用的市场化进程。从另一角度来看,尽管目前测试评价体系并不完善,各大车企却依旧计划推出网联功能车辆,但对其功能表现持怀疑态度,并未对网联系统开放控制端口,其直接后果是,网联类信息无法参与控制类辅助自动驾驶算法及策略设计,这对于辅助/自动驾驶技术的演进极为不利,主要体现可预测时间过短,对决策控制实时性要求提升。但从长远来看,V2X信息必将进入车辆决策控制体系,并作为重要数据源影响决策控制策略的演进,前提条件是能够通过完备的测试评价输出提升企业对V2X信息的信任度,进而对网联模块开放控制接口。
V2X测试评价挑战主要体现在以下几个方面:
(1)如何建立快速、低成本、可重复性好的测试方法;
(2)如何建立测试场景与测试设置之间的映射关联关系;
(3)如何建立测试输出与辅助/自动驾驶控制等级的映射关系;
(4)如果建立合理的故障跟踪机制。
在第2节,本文将以V2X通信性能及应用响应为例分析测试中涉及的关键技术。
2 网联性能及功能测试关键技术
网联类应用与通信性能表现密切相关,而通信性能则可能受到多种外来因素影响,如外部干扰、多径效应、雨雾衰减、多普勒频移等,因此网联应用测试的关键在于建立一套基于通信条件的应用响应评价标准,并将响应等级与辅助/自动驾驶等级关联映射,从而确保在某种通信条件下的应用响应等级能够满足行驶安全需求。
如前所述,在V2X信息介入控制决策的条件下,应用响应控制响应特性将取决于三个系统的综合表现,即通信系统、控制决策系统和执行响应系统。此时的故障一般表现为执行响应故障。而测试过程必须具备数据可追踪特性,即一旦发生执行响应故障,通过数据分析即可确定故障源自哪个系统,因此在测试中必须兼顾通信测试、应用响应测试和执行响应测试,执行响应测试属车辆工程范畴,本文不予讨论。下面将重点讲述通信测试和应用响应测试中涉及的关键技术问题。
2.1 暗室内测试方案
暗室测试是通信行业和汽车行业常用的測试方法,其差别仅在于测试内容不同,通信行业一般在暗室中进行OTA测试,而汽车行业则在暗室中进行EMC测试,尽管测试目标不同,但毫无疑问的是,暗室测试具有测试环境可控、测试价格相对较低、测试可重复性好等优点,因此在过去的几年中,本研究团队一直致力于智能网联汽车暗室测试方法的研究,并提出了一种用于ICV(Intelligent Connected Vehicle, 智能联网车辆)的半虚拟测试方法[9],设计了一个通信性能预测试平台,用于评价车辆多频无线终端的抗扰性能[10]。并结合IMT2020(5G)C-V2X工作组测试认证评价体系的研究基础,提出了暗室内测试方案,如图3所示:
图3所示测试方案的关键在于测试场景划分,车企关注网联应用响应特性,而应用响应表现与通信质量密切相关,导致通信问题的原因包括信道拥塞、外部干扰、传输损耗,本方案据此将测试场景设计分解为三个部分,即典型应用场景设计、电磁场景设计和环境场景设计。
典型应用场景设计重点分析不同道路类型条件下的信道拥塞特性,一般而言,信道拥塞与道路特性密切关联,因此将道路场景和通信场景合并考虑,此处的通信场景指车辆用户数条件,车辆用户数越大,导致信道拥塞的可能性也越大,信道拥塞可能导致数据包发送延迟增大,因此其对应指标为传输时延。
电磁场景设计重点分析外部电磁干扰环境,此处仅考虑外部电磁干扰源对通信传输的影响,对应指标为丢包率。
环境场景设计重点考虑影响通信传输质量的因素,包括雨雾衰减、多普勒频移、多径衰落,对应指标为丢包率。
下面分别进行阐述。
2.2 典型应用场景设计
如前文所述,车企关注的是应用响应特性,因此测试也以应用为对象,2016年TIAA&FuTURE的《智能网联汽车基本应用白皮书》中,列举了50个智能网联应用,通信方式包括V2V、V2I、V2P和V2N,该白皮书对应用场景进行了详细解释。实际测试中,不同网联应用场景具有一定的共同特性,例如,应用可与道路类型进行映射关联,如直道和弯道的FCW(Forward Collision Avoidance,前撞告警)应用和十字路口场景的IMA(Intersection Movement Assistant,路口辅助通过)应用,另外,网联类应用必须考虑密度场景,密度场景与信道拥塞直接关联。
一般而言,交通密度可表示为实际交通流量与道路设计最大交通能力的比值,可根据其取值设定干扰信号源数据包发送速率,并以之模拟拥塞场景。具体设置如下:
(1)低密度:交通密度小于等于0.3;
(2)中密度:交通密度大于0.3,小于等于0.6;
(3)高密度:交通流量大于0.6,小于等于0.8;
(4)拥堵:交通流量大于0.8。
据此可描述典型应用场景如表1所示。
在道路测试中可能考虑道路场景,但却很少考虑通信密度场景,即一般应用测试均为考虑信道拥塞条件。分析对象为鉴于目前网联类应用的实用化进程现状,本项目仅考虑V2V方式和V2I方式。
2.3 电磁场景设计
电磁干扰影响通信质量,电磁场景设计的关键是外部电磁干扰源分析,外部电磁干扰源典型值如表2所示:
一般而言,通信产品也需进行电磁兼容测试,但照射强度较小,电场照射强度仅为3~5 V/m,V2X模块最终需要搭载在车辆上,其电磁兼容测试也需遵照汽车电磁兼容测试规范展开,电磁场的参数设置可参照电磁抗扰测试标准ISO11451-2[11]和SAE J1551-17[12],一般电场照射强度为30 V/m和50 V/m,磁场照射强度为50 μT。
从目前来看,大多数V2X零部件厂商并未根据汽车电磁兼容要求进行设计,因此往往会在强照射条件下发生响应失效,如将其引入车辆控制,则将严重影响辅助/自动驾驶车辆性能表现。
2.4 环境场景设计
通信环境重点分析影响数据包传输质量的因素,包括雨雾衰减、多普勒频移和路径损耗三个因素。
雨雾衰减可根据ITU-R P.838-1[12]计算获得,多普勒频移则根据EVA(Extended Vehicular A model,扩展车辆信道模型)衰落信道确定,多普勒频移可用式(2)表示:
(2)
式(2)中,其中vA和vB分别是源车辆A和目标车辆B的速度,aA和aB是相应车辆的天线仰角,c0是无线电波的传播速度。
环境场景设计的重点是路径损耗估计,路径损耗不仅与道路类型有关,还与道路两侧建筑物密切相关,包括建筑物高度和建筑物表面反射系数,其难点问题在于信道模型建立。
CCSA给出的LTE-V2X终端性能测试规范中沿用3GPP TR36.885的Annex A中定义的D2D模型,但无法证明该模型适用于V2X场景。
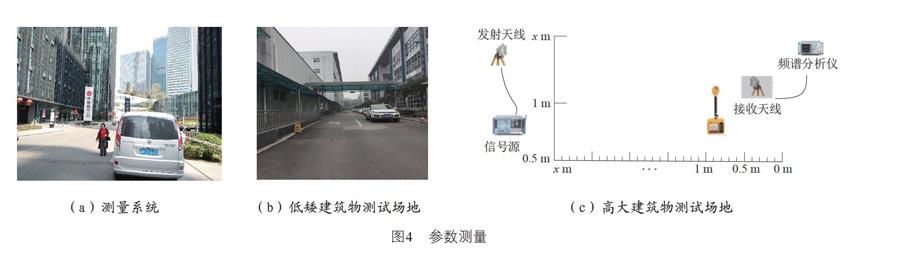
基于几何的统计建模方法是最重要和最流行的模型方法之一,它的主要目的是对信道的简单理论研究和真实信道的完全再现,通过一定的方法处理散射体,并且可以捕获信道的本质特性。但模型建立后依旧需要验证其有效性,本课题组采用几何模拟对不同道路类型和建筑物高度场景进行信道特性模拟,并选择典型场景进行外场数据采集,将信道模型模拟结果与外场采集数据进行对比拟合,修正信道模型参数,以此保证信道模型的有效性。
测试系统如图4(a)所示,测试地点如图4(b)、图4(c)所示,被测车辆向同一方向分别以V1和V2的速度行驶。测量时,信号源频率为5 915.000 MHz,输出功率为-30.0 dBm,天线高度为2 m,天线增益为-11.4 dBi,功放增益为43.6 dB,天线口径面发射功率为25.0 dBm,线缆损耗为0.8 dB。
2.5 综合场景设置
根據表1、表2,可将应用与具体道路场景进行分类对应,考量以道路类型为基础进行分类,并对应相关信道模型建立参数,详细分类如表3所示。
3 测试系统及其关键技术
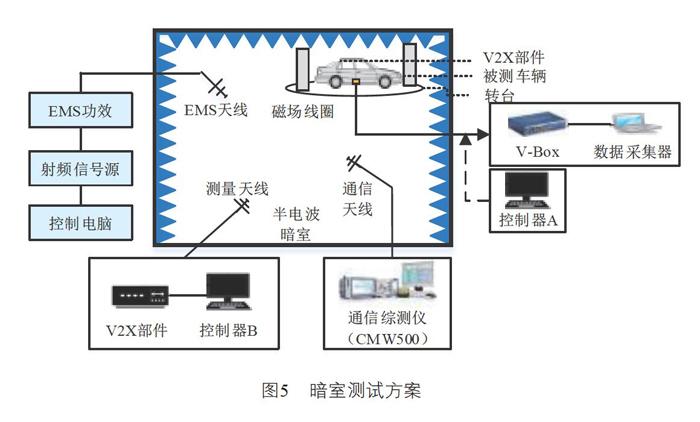
基于第2节部分所述场景分析结果,本项目组设计了一种面向V2X性能和功能的暗室内测试方案,测试布置如图5所示。
本项目组提出的暗室测试方案中涉及的关键技术如下。
(1)RV数据控制(控制器A):通过控制器A调节车载单元HV的位置信息,该位置信息与HV速度直接相关,例如,HV的速度设定为60 km/h,则在直道场景其横向坐标变换率为17 m/s;
(2)车辆用户数控制(控制器B):通过控制器B调节V2X数据包发送频次,以此构建多用户场景;
(3)电磁照射控制:包括电场照射强度控制和磁场照射强度控制。
通信测试仪CMW500与暗室内的通信天线相连,用于建立DUT的通信链路并监视通信性能参数。另一个V2X组件用作测试模块,其BSM(Basic Safety Message)信息,如GSP位置和速度,由控制器B设置。V-Box是一个数据采集器,用于采集DUT的输出数据包,它通过硬连线连接到笔记本电脑以太网。笔记本电脑用于收集数据,并将其保存为数据包捕获文件,这些数据文件在后期处理过程中被解析。解析的数据包含位置、速度、加速度、航向、跟踪和应用响应数据等。
测试示例:直道/低建筑物条件下FCW测试。
参数设置如下。
(1)道路/建筑物/反射系数场景:200 m直道/低建筑物/高反射条件,路径衰落为94.5 dBm;
(2)车辆行驶速度:RV的速度为0 km/h,HV的速度为60 km/h;
(3)降雨量为150 mm/h,雨衰值为1 dB;
(4)电磁辐射特性:磁场强度为50μT,电场强度为30 V/m、50 V/m。
假设初始SNR分别设置为-4 dB、0 dB、4 dB、8 dB、12 dB、16 dB、20 dB、24 dB和28 dB,根据以上设置计算可得设定信噪比为-6.094、-2.094、1.906、5.906、9.906、13.906、17.906、21.906和25.906。
该测试方案能够输出通信性能参数和应用响应结果,该测试方案在中国汽研EMC暗室中进行了验证性测试,证明了方法的有效性。
4 结束语
V2X相关应用的性能是汽车厂商和消费者非常关心的问题,也是科研领域的研究热点,如何评价认证V2X相关应用功能已经成为智能网联汽车市场化进程中必须解决的关键问题,本文从通信性能和应用表现两个方面入手,分析了影响网联类应用表现的通信因素,如信道拥塞、电磁干扰、多径传播、雨雾衰减和多普勒频移等,并以之为基础研究道路场景配置方法,将其用于指导暗室内测试环境配置,进而提出了暗室内测试方案。
V2X测试评估体系的构建依旧任重道远,需要在跨行业深度融合、相互理解的基础上展开研究,测试评估体系的合理性将直接决定智能网络汽车上市后的用户体验和安全表现,必须谨慎对待,希望中国C-V2X市场化进程能顺利推进。
参考文献:
[1] 梁玉红. 智能汽车研究与发展策略[J]. 电子技术, 2010(6): 66-69.
[2] 卓义斌,缪照浜,高月红,等. V2X技术发展历程及应用研究[J]. 电信工程技术与标准化, 2016,29(2): 20-23.
[3] 鲍海森. 浅析下一代车联网V2X技术[J]. 信息技术与信息化, 2017(9): 111-112.
[4] 阚旭. 车载网络V2X系统若干工程设计关键问题的研究[D]. 长沙: 国防科技大学, 2016.
[5] TIAA&FuTURE. 智能网联汽车基本应用白皮书[R]. 2016.
[6] Mcity. Mcity Test Facility[EB/OL]. [2019-09-22]. https://mcity.umich.edu/our-work/mcity-test-facility/.
[7] NHTSA. Commercial Connected Vehicle Test Procedure Development and Test Results – Forward Collision Warning[Z]. 2016.
[8] SAE J2945-1:2016. SAE International. On-Board System Requirements for V2V Safety Communications[S]. Warrendale: SAE International, 2016: 127.
[9] J Lei, Q Han, Y Xu, et al. Semi-virtual Test for ICVs in Automotive EMC Laboratory[C]//2018 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2018: 43-48.
[10] Q Han, J Lei, L Zeng, et al. EMC Test for Connected Vehicles and Communication Terminals[C]//2018 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2018: 55-60.
[11] ISO 11451-2. International Organization for Standardization. Road vehicles—Vehicle test methods for electrical disturbances from narrowband radiated electromagnetic energy—Part 2: Off-vehicle radiation sources[S]. Switzerland: International Organization for Standardization, 2015: 25.
[12] SAE J551-17. Electromagnetic Compatibility (EMC) Standards. Vehicle Electromagnetic Immunity—Power Line Magnetic[S]. Warrendale: SAE International, 2015: 8.
[13] ITU-R P 838-3. International Telecommunication Union-Radiocommunication (ITU-R). Specific attenuation model for rain for use in prediction methods, Recommendation[S]. Geneva: International Telecommunication Union, 2005: 8. ★
猜你喜欢
建筑与装饰(2023年20期)2023-11-24
军民两用技术与产品(2021年5期)2021-07-28
电子测试(2018年13期)2018-09-26
数学小灵通·3-4年级(2017年2期)2017-05-30
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
电脑知识与技术(2016年17期)2016-07-23
商(2016年8期)2016-04-08
商(2016年4期)2016-03-24
中国医疗设备(2013年9期)2013-01-26
中国蜂业(2013年11期)2013-01-23
