船用逆变器带电动机稳定性研究
2019-12-23 06:09:02李兴东汪永茂
船电技术 2019年12期
李兴东,汪永茂,鄢 伦
船用逆变器带电动机稳定性研究
李兴东,汪永茂,鄢 伦
(武汉第二船舶设计研究所,武汉 430064)
针对船用逆变器带电动机类负载有时出现功率振荡的问题,理论分析指出了逆变器和电动机阻抗特性不匹配是振荡产生的原因,结合理论分析结论通过改变逆变器电压外环和电流内环的控制参数,调节逆变器的输出阻抗,避开振荡发生条件,解决了逆变器带电动机时的功率振荡问题。逆变器整改前后带电动机的实际试验结果验证了解决方案的可行性。
船用逆变器 功率振荡 阻抗特性
0 引言
电力电子技术的飞速发展,使得采用电力电子开关器件直接实现交、直流电能双向变换的整流-逆变型主变流装置替代旋转式变流机组成为船舶电力系统发展的趋势,在当前船舶电力系统中扮演了举足轻重的角色[1]。整流-逆变型主变流装置相比发电机-电动机式结构具有振动噪声低、无换向火花、无机械磨损、效率高、响应快、体积小和操作方便等优点,且采用了三重化双向直流变换器和交流多功能变换器的拓扑结构[2],实现了高频整流、逆变、双向直流变换、不间断供电、无功补偿、蓄电池充放电和交直流限流等功能的一体化,大大简化了船舶电力系统的设计。
某型船采用了交、直流双向变换器的独立电力系统结构。当该型船用主变流装置直流发电时,其输入为正常交流电网,输出为直流电网提供电能,向蓄电池、推进电机、其它直流负载等供电;当交流电网出现故障时,主变流装置由直流电网供电,经双向变换器产生交流电,保证交流电网的正常运行,此时该主变流装置相当于一台逆变器。
在实船上舰船电气设备多,且负载类型复杂多样,有可能出现由于负载不匹配出现的功率振荡现象。本文将针对某型船用逆变器带电动机负载功率振荡问题展开详细分析,并给出解决措施。
1 现象
某型船用逆变器在单机交流发电启动制冷机负载时(额定功率90 kW,为Y/Δ绕组切换启动)有时出现交流电流振荡(电机出现较大噪声后人为停机),振荡频率10 Hz,振荡期间逆变器端口交流电流约280~580 A/rms,该逆变器端口交流电压正常且无波动(约390 V/rms),相应直流电流有10 Hz的很大振荡波动(相应有功产生振荡)。制冷机负载由岸电起动完成后转切至由该逆变器供电时,有时也出现同样的交流电流振荡。振荡期间现场控制器内部采集的相关波形分别如图1(控制器内部采集波形为标幺值)。此类制冷机由岸电电网和发电机供电时,均无此现象。
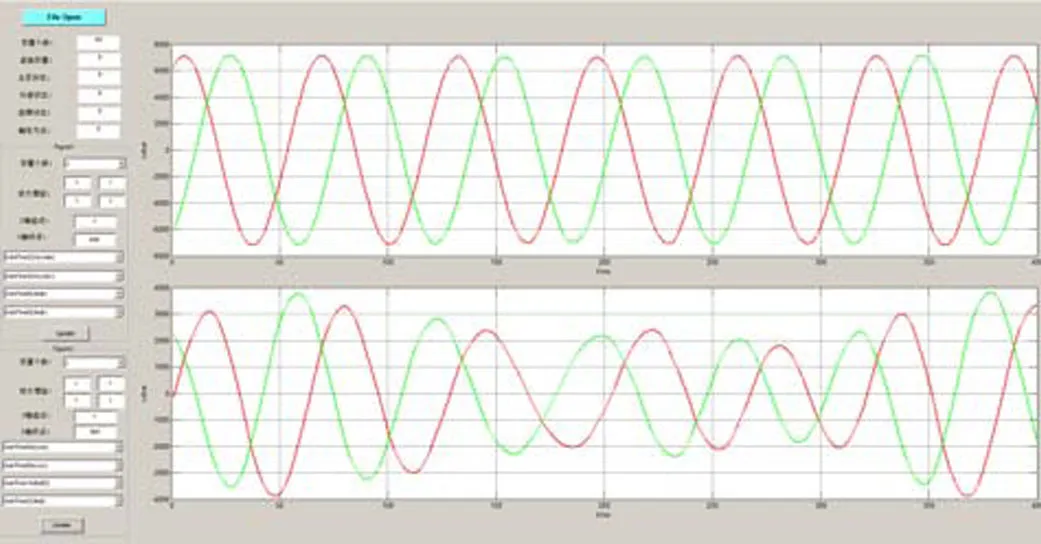
图1 控制器内部采集的交流端口电压(上图)和电流波形(下图)
2 稳定性分析
根据文献[3]和[4],逆变器带电动机负载原理图如图2所示,假定逆变器的输出阻抗为s(),电动机的输入导纳为L(),逆变器、电动机单独运行稳定,则两者级联时,系统稳定的充分条件为式(1)。

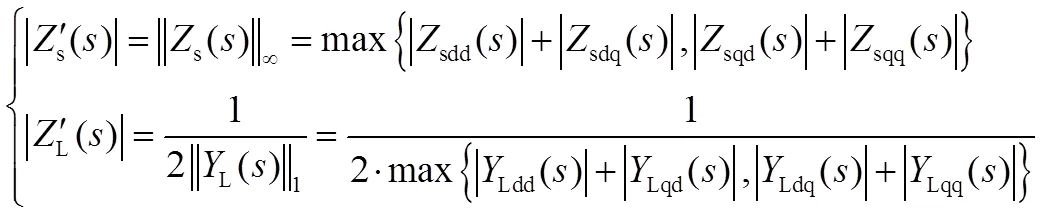
则由式(1),可得出两者等效阻抗的关系需满足:


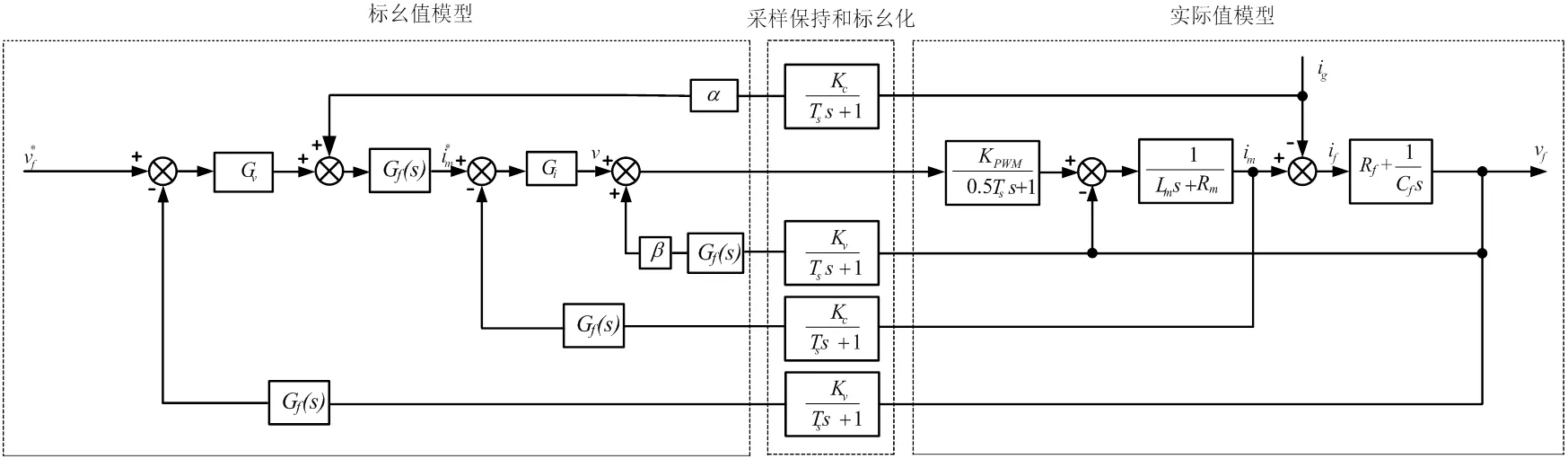
图3 某型逆变器的实际控制框图
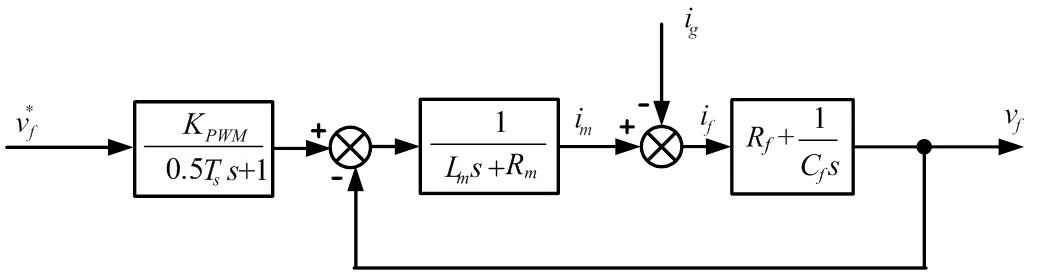
图4 某型逆变器的开环控制框图


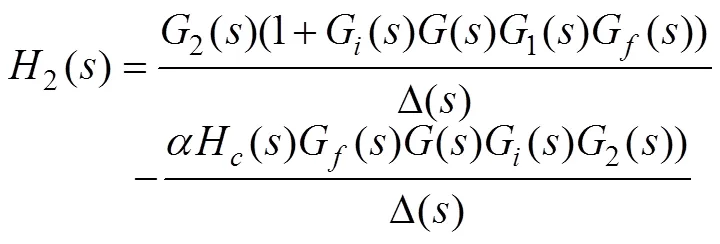
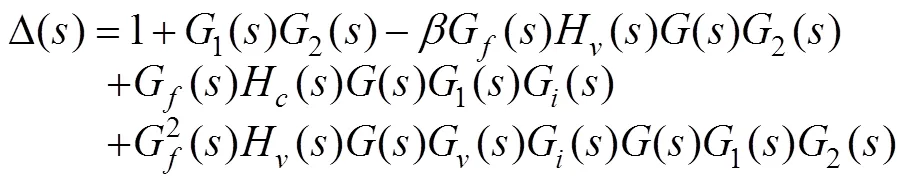
其中,1为输出电压对参考电压传函,2为输出电压对负载电流(逆变器输出阻抗)传函,令1=1/(Ls+R),G(s)=R+1/Cs,G(s)=K+K/s,G(s)=K+K/s=K/(0.5Ts+1),H(s)=K/(Ts+1),H(s)=K/(Ts+1),
则:

结合文献[5]和[6]中的参数,可以分别得到开环和闭环下的逆变器输出阻抗。该型逆变器在陆上联调和实船所用电动机参数如表1所示。利用三相电动机详细的动态数学模型[7-8](考虑转子运动方程及定子磁链、转子磁链动态后为5阶非线性微分代数方程组),以逆变器输出额定电压(390 V)、电动机拖动恒转矩特性制冷机(负载转矩L=74 Nm,对应电动机25%功率输出)为输入条件,分别计算得出两种工况电动机的等效输入阻抗,并将其与逆变器闭环输出阻抗进行对比(实际控制参数为实船装备参数),如图5所示。
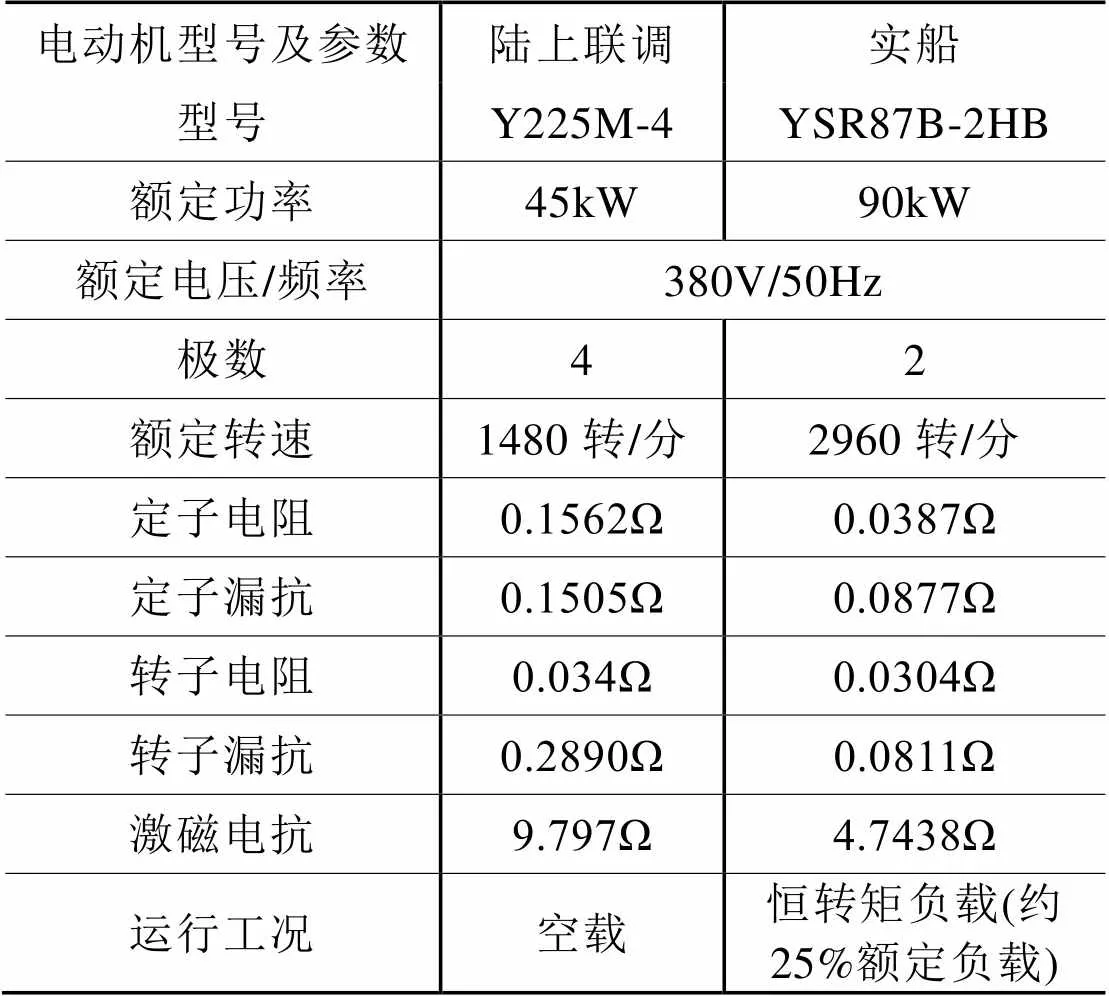
表1 陆上联调、实船实验时的电动机参数
从图5的计算结果可以看出,整改前参数会使得逆变器输出阻抗与电动机输入阻抗存在交叉,且交叉点在逆变器输出频率范围内,不能严格满足式(3),因此导致系统振荡。整改前控制参数及3组新控制参数如表2。与整改前参数相比,3组新的控制参数均能有效提高逆变器的输出阻抗,且保证逆变器输出阻抗与电动机输入阻抗没有交叉点,系统可稳定运行。
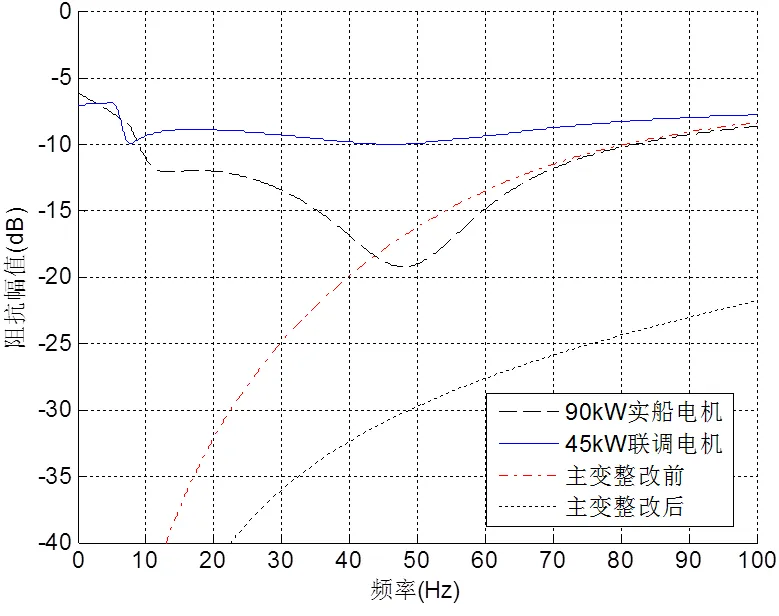
图5 某型逆变器输出阻抗与两型电动机输入阻抗计算结果
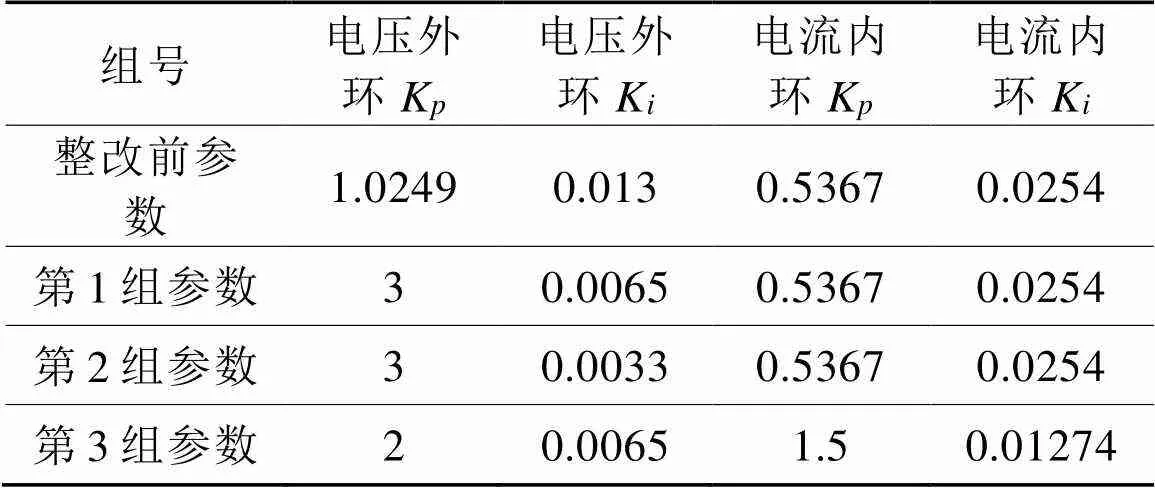
表2 某型逆变器环节控制参数
3 试验验证
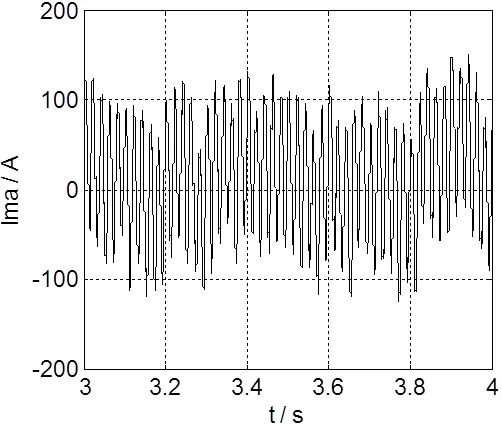
图6 整改前90 kW电动机定子A相电流
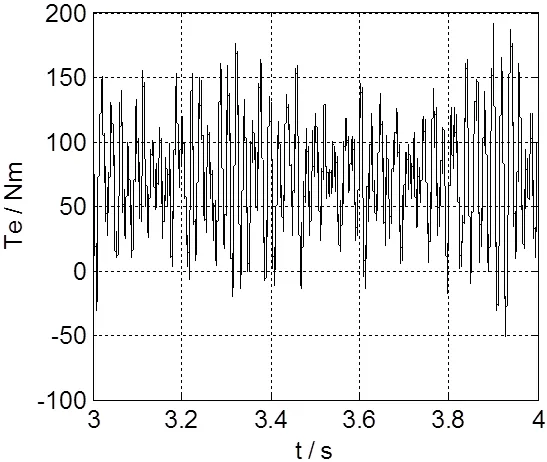
图7 整改前90 kW电动机电磁转矩
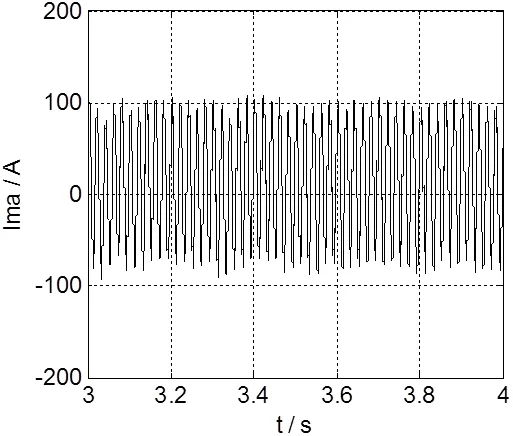
图8 整改后90 kW电动机定子A相电流
整改参数后在实船上针对该型逆变器进行了问题复现和整改抑制振荡试验、控制参数调整后静止主变的并网和并联试验、实船现有负载条件下的静止主变负载突加及突缷试验,试验结果如图6-图9所示。结果表明:通过调节逆变器交流电压控制参数来抑制振荡是有效的。
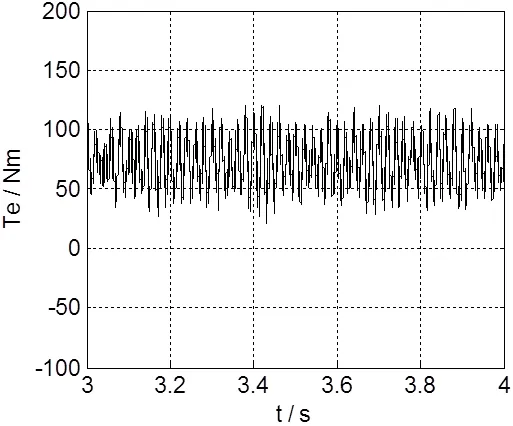
图9 整改后90 kW电动机电磁转矩
4 结论
综上所述,船用逆变器带电动机负载稳定性与两者阻抗匹配有关。该振荡问题与电机的功率等级有关,最终反映在阻抗匹配问题上。逆变器输出阻抗特性偏软,在工作频率范围内出现了逆变器输出阻抗大于电动机输入阻抗的情况。合理选用控制参数,可以对逆变器的输出阻抗特性进行调节,从而到达避开发生振荡的条件。该方法对其他场合和类型的电力电子设备带电动机负载稳定性同样有借鉴意义。
[1] 马伟明. 电力电子在舰船电力系统中的典型应用[J]. 电工技术学报, 2011.
[2] 陈明, 汪光森, 刘德红, 等. 多重化双向DC-DC 变换器复合校正双闭环控制策略研究[J]. 电力自动化.
[3] 林明耀, 周鹗. PWM逆变器—磁阻同步电动机驱动系统运行稳定性的分析[J]. 电机与控制学报, 2001(1): 16-19.
[4] 崔建明. 逆变器驱动异步电动机的稳定性分析[J]. 太原理工大学学报, 1999(01): 45-48.
[5] 刘德红, 汪光森, 胡安, 等. 双向交-直-直PWM 变换器无缝开关转换控制技术研究[J]. 电气传动, 2009, 39(9): 27-32.
[6] 刘德红, 胡安, 汪光森. 双端口多功能交-直流双PWM 变流器控制策略[J]. 电机与控制学报, 2010 (4).
[7] 姚家祎. 三相交流异步电动机阻抗参数计算[J]. 建筑电气, 2016, 35(4): 21-24.
[8] H. Wayne Beaty. 电力计算手册 M . 第 3 版.北京中国电力出版社, 2007.
Stable Analysis of Ship Inverter with Electric-motors
Li Xingdong, Wang Yongmao, Yan Lun
(Wuhan Second Ship Design and Research Institute, Wuhan 430064, China)
U665.14; TM464
A
1003-4862(2019)12-0058-04
2019-09-04
李兴东(1987-),男,工程师。研究方向:船舶电力系统。E-mail: liznrn@126.com
猜你喜欢
城市轨道交通研究(2023年9期)2023-10-08 01:11:42
电力设备管理(2022年7期)2022-05-31 03:07:28
水利水电工程设计(2017年1期)2017-05-17 05:20:31
现代工业经济和信息化(2016年8期)2016-05-17 05:37:35
电工技术学报(2016年2期)2016-05-06 10:44:15
电测与仪表(2016年24期)2016-04-12 00:20:58
西部广播电视(2015年10期)2016-01-18 03:46:14
中国科技纵横(2015年21期)2015-12-14 19:46:09
电测与仪表(2015年19期)2015-04-09 11:32:58
无线电工程(2015年8期)2015-03-15 06:08:46