基于CANNY算子的输电线路移动作业机器人视觉定位控制
2019-12-20 08:04:18李红军刘雪强
武汉纺织大学学报 2019年6期
张 安,李红军,江 维,严 宇,刘雪强
(1.武汉纺织大学 机械工程与自动化学院,湖北 武汉 430200;2.湖南省电力有限公司 检修公司,湖南 长沙 410009;3.军事科学院系统工程研究院 军需工程技术研究所,北京 100010)
0 引言
带电作业[1-5]是在高压电气设备上不停电进行检修、测试的一种作业方法,其对电网稳定运行,确保稳定供电具有极其重要的意义。用带电作业机器人代替工人进行带电作业,不仅能够彻底消除工人等电位作业的安全隐患,还能大幅度提高作业效率,是电力系统自动化巡检的发展趋势。耐张线夹引流板螺栓紧固是带电作业的重要内容之一,由于跳线常年受风载荷作用,耐张线夹引流板螺栓易发生松动[6-9]。螺栓松动之后其接头处电阻变大,导致温度大幅上升,如不及时解决,不仅产生电能损耗,而且会对输电线路以及金具耐久性产生恶劣影响,甚至造成停电事故。传统解决方法是带电作业工人登塔等电位作业,人工将螺栓拧紧,此种方法作业效率较低,紧固效果因人而异,幵且对工作人员的人身安全有较大风险。有关带电作业机器人的研究工作日本九州公司[10]研制一种带电作业升降平台,可以实现承载工作人员等电位作业,但其主要用于配电网,不适用于高压输电线路。加拿大魁北克电力研究所[11]研究的LineScout机器人可以搭载多种末端工具在输电线路上实现线路暂时束紧、防震锤螺栓紧固等功能,由于其机械结构限制,幵不能满足耐张线夹螺栓紧固所需位姿要求。国内山东电科院[12]研究的带电作业机器人试验样机和相应的作业工具,操作人员在绝缘斗内进行操作,其所具有的功能包括线路的带电切断、接引、带电更换绝缘子等,但该样机仅适用于10 kV及以下的电压等级,难以适应实际输电线路高电压的要求。
综上所述,虽然带电作业机器人研究已经有所进展,但是在高压输电线路耐张线夹引流板螺栓紧固作业方面研究十分稀少,在引流板柔性作业面上耐张线夹螺栓紧固机构位姿控制、作业末端与螺栓螺母对准定位以及自适应控制是该项作业所需攻克的重点问题,当前此项定位控制技术大多是基于视频交互的手动调节,需要人工干预对准作业过程,双机械手联动控制粗定位技术在一定程度上提高了作业效率,但幵不能最终解决机器人作业末端与作业对象的自动对准对接定位问题。基于上述分析本文提出了一种基于改进Canny算子[13-15]的机械手末端与螺栓螺母自动对准定位控制算法,较常规人工手动对准控制在提高机器人作业效率的同时还进一步提高其定位的精度。
1 带电作业机器人作业环境及机器人实体结构
1.1 带电作业机器人作业环境
如图1所示为高压输电线路耐张杆塔图,耐张线夹位于输电线路与跳线连接处,引流板及螺栓模型图如图2所示。由于在耐张杆塔处线路的转角、杆塔的型号等因素不同,导致引流板与垂直面之间夹角产生差异,因此在一定程度上给机器人的作业控制带来一定难度。

图1 高压输电线路耐张塔示意图
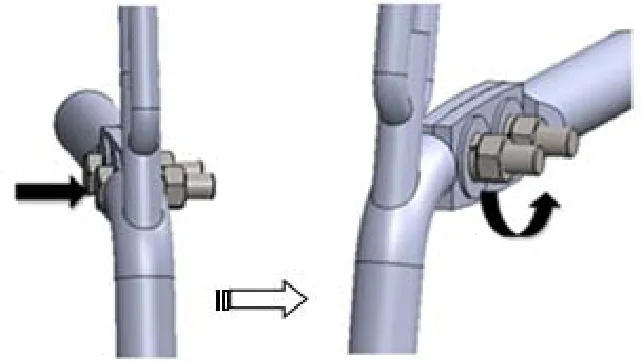
图2 引流板模型图
1.2 带电作业机器人的实体结构
带电作业机器人由奇偶两个行走臂、两个机械臂1和机械臂2两个作业臂、控制箱组成。其中行走臂具有夹紧机构,能够在线路上行走及定位;机械臂1由下而上由旋转关节、伸缩关节、纵移关节组成,机械臂2由下而上由横移关节、旋转关节、伸缩关节、纵移关节组成。两个作业臂在线路上作业时都有足够裕度,使其能满足带电作业机器人的空间作业要求。
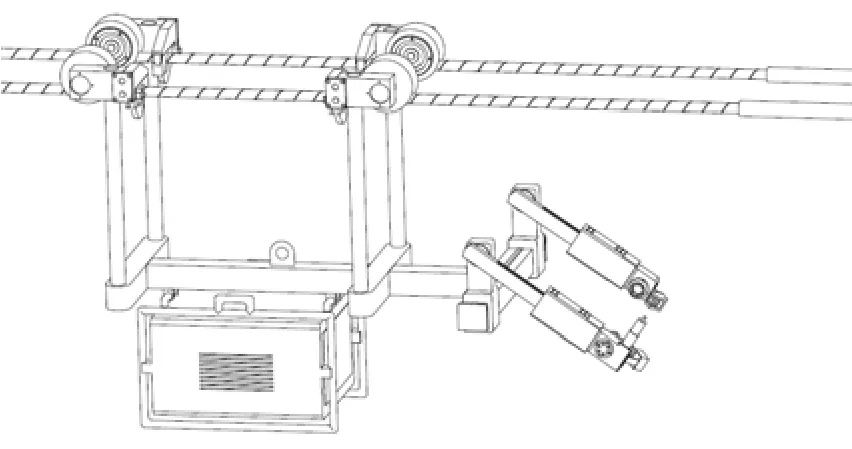
图3 螺栓紧固带电作业机器人实体结构图
拧螺栓作业末端通过燕尾槽固定在作业臂纵移关节上。安装于作业臂2的作业末端有大功率电机,可以实现螺栓紧固。末端采用六角套筒扳手形式,以确保套筒与螺栓接触面足够大;末端采用内设复位弹簧的虎克铰,能够适应耐张线夹螺栓一定角度的位置,减小紧固螺栓时对末端产生的内应力。螺栓紧固带电作业机器人实体图如图3所示。
2 机器人螺栓紧固作业流程及机械手末端位姿定位控制方法
2.1 螺栓紧固作业流程
如图4所示,机器人进行耐张线夹螺栓紧固作业时,作业机械手也需要在机器人行驶过程中由初始姿态运动至工作姿态,待前轮位于耐张线夹正上方时,完成对耐张线夹的初定位;而后进行螺栓固定操作,对机械手1的旋转及伸缩关节进行调整,使螺栓固定装置的内六角套筒与螺栓头同轴心,随之将机械手1的纵移关节靠近螺栓头,直至将螺栓头压住,以限制其转动;接着进行拧螺母操作,对机械手1的横移旋转及伸缩关节进行调整,使螺栓固定装置的内六角套筒与螺栓头同轴心,随之将机械手2的纵移关节靠近螺母,直至将螺母完全套住,拧螺母装置电机旋转,进行螺母的拧紧;当机器人完成一套螺栓组件的紧固工作后,拧螺母装置以及螺栓固定装置分别由机械手 1、2纵移装置携带至外限位,进行下一个螺栓紧固作业。带电作业机器人螺栓紧固作业流程如图4所示。
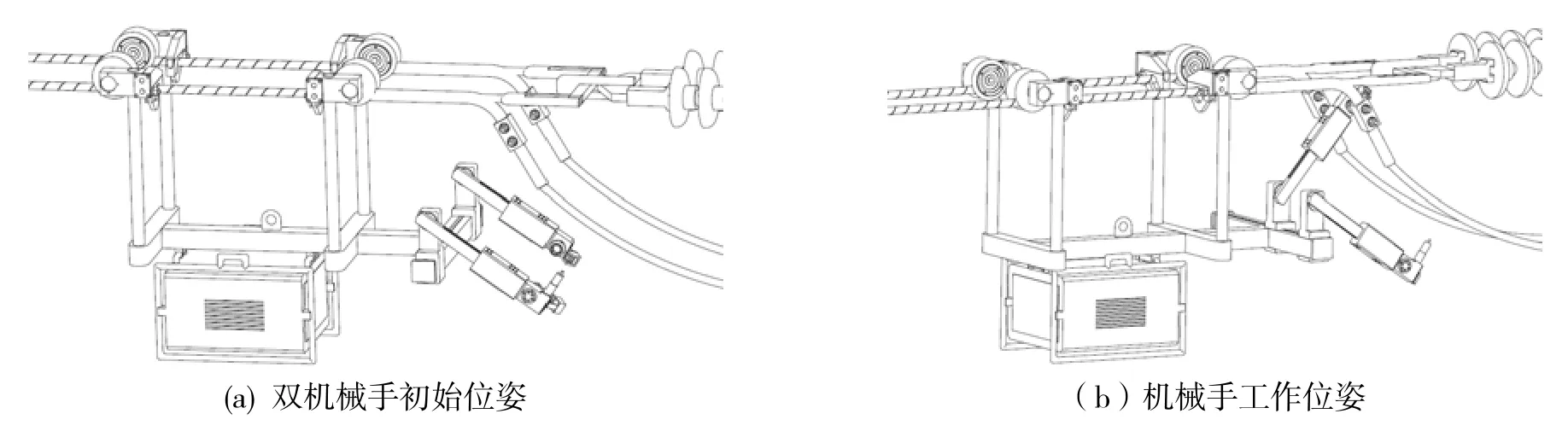
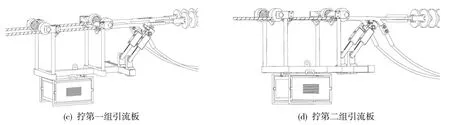
图4 机器人螺栓紧固作业流程
2.2 基于机器视觉的机械手末端空间位姿定位方法
带电作业机器人奇臂行走轮定位到压接管后,双机械手可协调运动开始作业。在螺栓紧固作业中,拧螺栓作业末端需与螺栓实现完全对接之后才能进行螺栓紧固工作,对接对机器人末端执行器空间位姿要求极高,首先套筒中心点在对接时须与螺栓内六角中心点重合,或者说套筒中心点在螺栓中心线上,这是套筒能够套住螺栓的必要条件,然后套筒内六角面须与螺栓六角面平行,才能够控制纵移关节内移,完成对接任务,对接成功后拧螺母机构可以开始执行拧螺母操作。为了实现套筒与螺栓的准确对接,在螺栓套筒与螺栓轴之间安装有十字联轴器,可进行角度的微调。为了全方位地观察螺栓固定装置与螺栓的相对位姿,在固定螺栓装置箱体上安装有2个呈垂直角度布置的摄像头。拧螺母装置与螺栓固定装置结构相似,多了一个传动机构驱动旋转轴转动,在旋转轴与拧螺母套筒之间也安装有十字联轴器,可以实现套筒与螺母的准确对接。
3 机器人末端套筒中心识别与自动对准对接控制方法
3.1 Canny算子及其改进图像边缘检测算法
Canny算子图像边缘检测算法实现过程主要包括四步:
STEP1:图像平滑处理。一般可利用(1)式高斯函数G(x)构造滤波器,按行、列对待处理图像f(x,y)进行卷积运算后得到待处理图像的平滑图像I(x,y),(1)式中σ是高斯函数的标准差,其作用是控制图像平滑程度。

STEP2:计算图像梯度幅值和方向。计算平滑后图像I(x,y)的梯度幅值M(x,y)和梯度方向H(x,y),其中梯度幅值为(2)式,梯度方向为(3)式。kx、ky分别为图像I(x,y)被滤波器fx、fy行列检测后的结果。

STEP3:对图像梯度和幅值进行非极大值的抑制。非极大值抑制其目的是寻找I(x,y)中所有可能的边缘点,其基本原理为利用 3×3 的邻域作用在梯度幅值阵列M(x,y)的所有点上,若邻域中心点的梯度幅值 M(x,y)较沿梯度方向上的两个相邻点的幅值大,则将当前的邻域中心点认定为可能的边缘点,否则将M(x,y)赋值为零,认定为非边缘点。
STEP4:双阈值方法检测和边缘连接。双阈值算法是对经非极大值抑制的图像使用高、低两阈值进行分割处理,得到两阈值的边缘图像,再用递归跟踪算法,不断搜索边缘,直到将所有边缘点都连接起来后停止搜索。
在进行图像边缘检测时,传统的Canny算子是用高斯滤波器去噪,平滑度控制参数σ在实际中很难找到较准确的值,导致在图像边缘检测中该算法存在一定的局限性。此外传统 Canny 算子只提取x方向和y方向的梯度后进行计算,一定程度上会丢失一些重要的边缘信息,尤其是一些斜方向上的信息。因此应对图像两个斜方向上的梯度信息进行计算,最后综合原有梯度信息和斜方向上得到的梯度信息得到最终的边缘图像,整个改进Canny 算子图像边缘检测算法流程如图5所示。
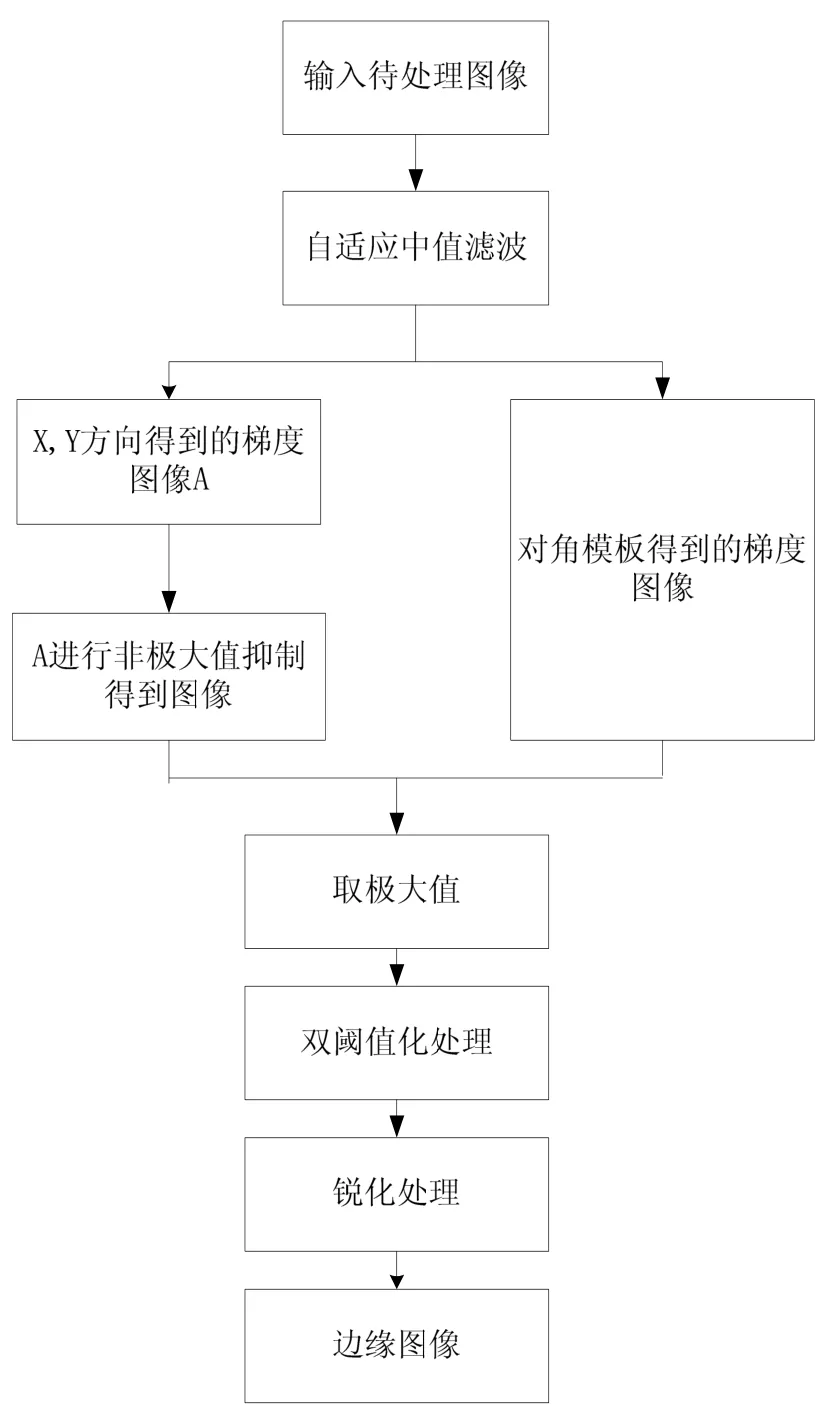
图5 改进Canny算子图像边缘检测流程
3.2 基于Canny算子的末端套筒边缘检测与中心点识别
基于作业过程中四路视频信息采集到的末端套筒图像,通过改进Canny算法从视频图像中识别机器人执行末端套筒圆柱体的上下边线,然后在两条线上取点,绘出两条直线的中心线,同时通过识别算法得出末端套筒的中心点,由六角螺栓几何特征可计算出六角螺栓的中心点和中心线方程。通过控制伸缩机构以及旋转机构,调整中心点的位置,最终使套筒中心点位于螺栓中心线上,纵移机构运动,使末端与螺栓端面贴合,此时基于机器视觉的自动对准对接即完成。如图 6所示为普通Canny算子和改进Canny算子在带电作业机器人末端套筒边缘检测与中心点的识别效果图。从图6 Canny算子末端套筒边缘检测与中心识别效果来看,图6(a)普通Canny算子基本能够识别套筒边缘,但是有些边缘线不连续,效果一般;对于套筒中心点的识别普通Canny算子的识别效果明显存在一定偏差,但是由于末端套筒的旋转弹簧使得在存在一定误差的情况下对接过程中末端通过自适应调整依然能够实现成功对接操作。图6(b)改进Canny算子能够较清晰的识别到套筒边缘,套筒边缘保持连续,中心点的识别位置精度较普通Canny算法明显提高,上述结果验证了改进Canny算子套筒边缘检测与中心识别是有效性。
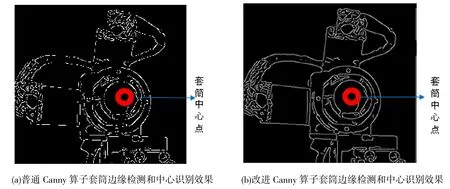
图6 Canny算子套筒图像边缘检测与中心点识别效果
4 试验
为验证本文基于改进Canny算子的机器人执行末端套筒与引流板螺栓螺母的自动对准对接控制算法的有效性,在国家电网某带电作业中心进行带电拧紧引流板螺栓试验,试验步骤为首先是机械手1末端套筒与螺栓头的对准对接,其次是机械手2末端套筒与螺母的对准对接,最后是执行拧螺母操作,作业完成后双机械手末端与螺栓头螺母分离,机器人退出工作区准备下线。通过安装在两个机械手末端上的4个摄像头所拍摄到作业过程如图7所示。通过整个作业过程可知,双机械手末端套筒与螺栓头螺母的自动对准对接及分离整个动作连贯、流畅、平稳,幵且由于末端套筒具有一定的自适应性允许套筒与螺栓螺母对准在存在一定误差的情况下依然能够实现成功对接,由此可见本文所提出的改进Canny算子末端套筒定位控制算法具有较强的工程实用价值。
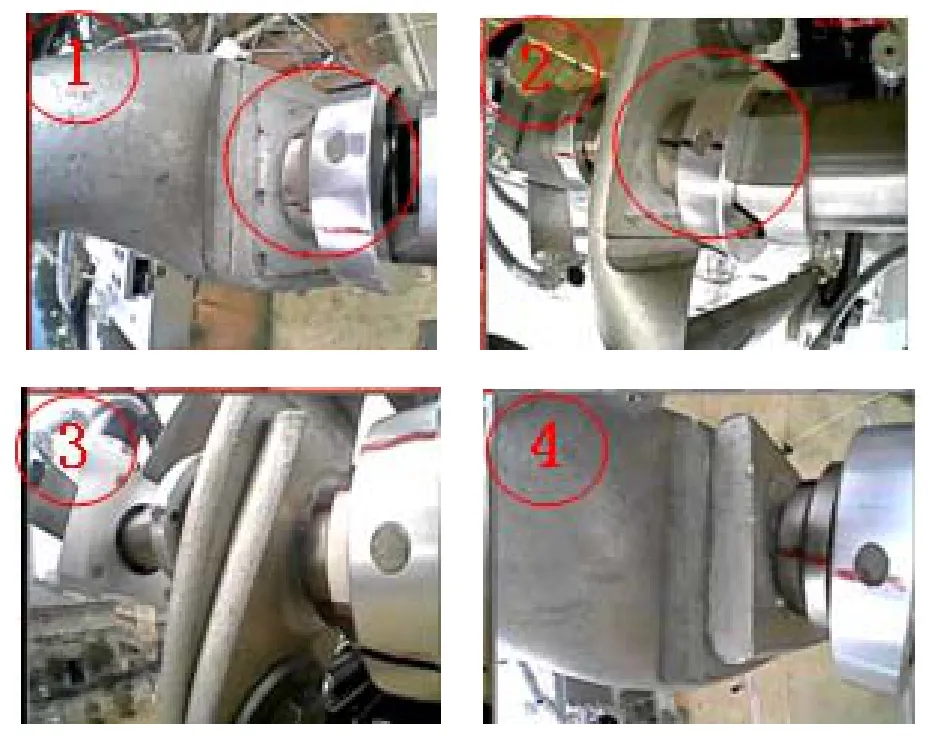
图7 双机械手末端与螺栓螺母的定位效果
5 结论
本文提出幵设计了面向高压输电线路耐张线夹螺栓紧固带电作业机器人的基本构型,分析了螺栓紧固作业原理与作业流程。在常规Canny算子图像边缘检测算法的基础上提出了一种改进算法,将改进算法应用到带电作业机器人作业末端套筒的边缘检测与中心点识别上,改进算法在套筒边缘检测上边缘更加连续,在中心点识别上精度更高。通过现场带电作业试验也验证了基于改进Canny算子的双机械手末端套筒与螺栓头螺母自动对准、对接定位控制方法具有较强的工程实用性。
猜你喜欢
中国设备工程(2024年6期)2024-04-08 07:07:08
结构工程师(2022年2期)2022-07-15 02:25:22
装备制造技术(2020年9期)2021-01-26 00:15:24
有色金属加工(2020年4期)2020-08-20 04:35:04
经济技术协作信息(2018年33期)2018-12-06 08:56:08
福建质量管理(2018年20期)2018-11-14 04:42:46
电子测试(2018年18期)2018-11-14 02:31:08
制造技术与机床(2017年10期)2017-11-28 05:23:55
凿岩机械气动工具(2017年3期)2017-11-22 07:21:54
电子测试(2017年23期)2017-04-04 05:07:50