
基于线阵CCD像素数提取的高速运动目标形变测量方法研究
2019-12-13 02:14徐成强王营博袁诗翥姜雅慧
应用光学 2019年6期
徐成强,王营博,曹 杰,郝 群,袁诗翥,姜雅慧
(北京理工大学 光电学院 精密光电测试仪器及技术北京市重点实验室,北京 100000)
引言
高速运动目标大量存在于航空航天、交通安全、军事侦察、靶场测试、目标拦截、工业流水线检测、生物与力学研究等领域[1-2],因此能够实现对高速运动目标高精度形变的测量变得意义重大,而基于线阵CCD的非接触式测量系统因其小体积、高分辨率、高帧频下数据处理量小以及造价低廉等特点受到业界的广泛关注[3-4]。线阵CCD是精密测量中广泛采用的一种光电传感器,主要用于激光三角法位移测量、交汇式目标运动测量等,目前大多用于低速微小位移及精密尺寸的测量。田小超[5]设计了一种基于线阵CCD的二维轮廓扫描系统,利用线阵CCD扫描,激光三角法测量低速运动目标二维轮廓,实现目标测量平均误差0.928 mm,方平[6]研制一种新型基于线阵CCD的微小角位移传感器,实现最大量程为0.2 rad,分辨率为0.000 2 rad,可应用于微小角位移特性的动态检测,但二者均未能实现对高速运动目标的高精度尺寸测量;雷志勇等人[7]提出采用线阵CCD交汇测量与人工光源相结合的测量方法,实现坐标测量误差10 mm,但针对高速运动目标尺寸高精度测量精度欠佳[7]。Reulke.R[8]研制的基于线阵CCD和激光扫描仪的高分辨率映射系统,能完成在目标与线阵CCD相对运动情况下的测量工作,但仍无法满足对高速运动目标的测量要求。因此,提出一种基于线阵CCD像素数提取的高速运动目标形变测量方法,实现高速运动目标形变的高精度测量。
本文提出的基于线阵CCD像素数提取的高速运动目标形变测量方法,配合DMD模拟的高速运动目标形变过程,通过线阵CCD采集高速运动目标强度——像素变化曲线,采用基于微分法的像素提取方法实现目标强度——像素曲线斜率变化率最大点的准确界定,准确提取高速运动目标像方尺寸像素数,实现高速运动目标形变高精度测量。
1 基于线阵CCD像素数提取的形变测量原理
1.1 线阵CCD测量原理
线阵CCD形变测量的测量原理[9]如图1所示,目标通过焦距为f′的光学系统在线阵CCD光敏元件上成像。已知光学系统与线阵CCD的间距为L′,目标在线阵CCD中成像大小为d,激光测距测量目标与光学系统之间的间距为L。
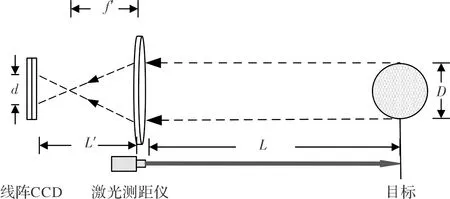
图1 线阵CCD测量原理Fig.1 Linear CCD measurement principle
通过公式(1),即可求得目标直径D。
(1)
式中:N为目标占线阵CCD像素个数;w为线阵CCD像元尺寸;β为光学系统的放大率。
1.2 像素数提取方法
目标在线阵CCD中成像大小d=Nw,因此目标占线阵CCD像素个数N的精度将直接影响d的精度,进而影响线阵CCD形变测量对目标直径D的测量精度[10]。因此如何获得一个精确的N值是基于线阵CCD像素数提取的高速运动目标形变测量方法对目标直径D进行精确测量的关键所在。
通过对线阵CCD采集到的数据进行二值化处理,将目标尺寸部分与背景部分分离成二值电平,即可获取目标占线阵CCD像素个数N[11]。数据二值化方法包括:固定阈值法、浮动阈值法和微分法[12]。
文章中所采用的方法为微分法[13]。目标与背景在光强上的明显变化,反映在线阵CCD的输出信号上为目标尺寸边界处会出现电平高低的变化[14]。选取目标强度—像素曲线上升沿与下降沿,并且分别对其进行微分处理,以强度——像素曲线中斜率变化率的最大值点作为目标边界点,获取最精确的像素个数N值。计算公式为
x1=‖∂2ψ1‖∞
x2=‖∂2ψ2‖∞
N=x2-x1+1
(2)
式中:ψ1与ψ2分别为强度—像素曲线的上升沿与下降沿;x1与x2分别为强度—像素曲线斜率变化率最大值点所对应的像素位置。
其原理如图2所示,具体的像素数提取流程图3所示。
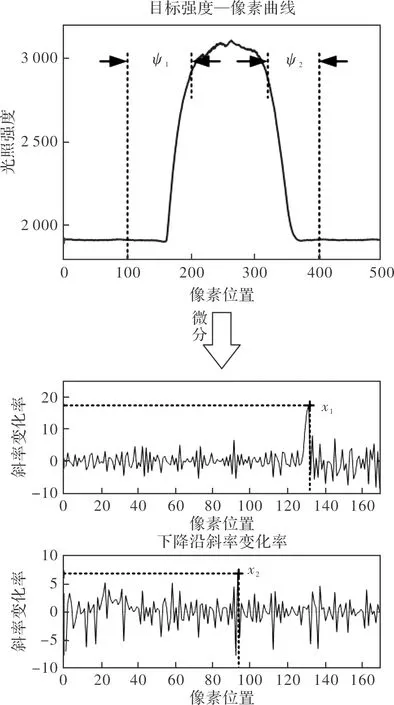
图2 像素提取原理Fig.2 Pixel extraction principle
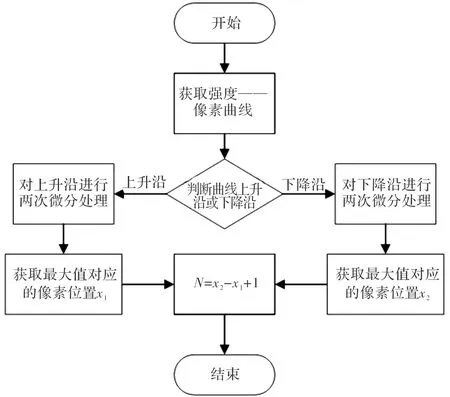
图3 像素数提取法流程图Fig.3 Flow chart of pixel number extraction method
2 实验测试及结果
高速运动目标可以通过实物模拟或者仿真模拟得到。前一种方法模拟生成的高速运动目标具有速度相对较低、成本高昂、危险性大以及模拟速度不可控等缺点。而仿真模拟却可以克服以上缺点,能够实现一个低廉、安全并且速度可控的模拟高速运动目标。
根据线阵CCD获取信息只是目标通过线阵CCD视场所在空间的截面这个工作特点[15]。可将分解成若干截面的目标按照一定的频率输出,即可模拟出能被线阵CCD探测的高速运动目标。文章中使用DMD模拟生成高速运动目标,原理如图4所示。
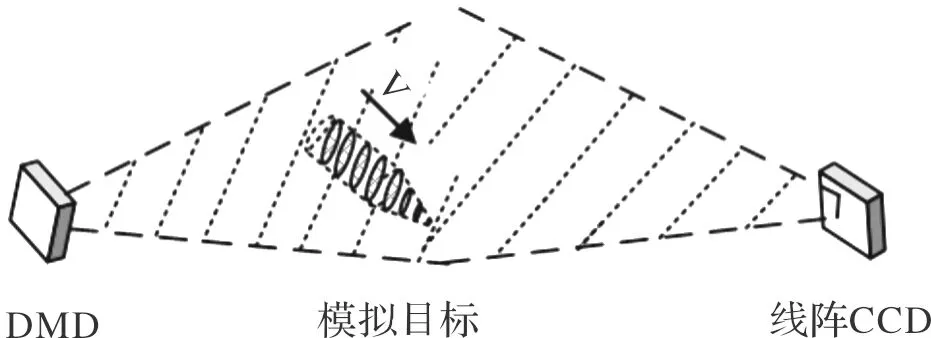
图4 模拟高速运动目标生成与信息获取原理Fig.4 Principles of simulating high-speed moving target generation and information acquisition
2.1 实验环境搭建
使用DLP LightCrafter6500 DMD,TCD1304线阵CCD搭建如图5的实验平台。

图5 实验平台Fig.5 Experimental platform
DMD固定于线阵CCD正上方,DMD镜头的光轴与线阵CCD镜头的光轴平行,并垂直于正前方的投影屏。线阵CCD使用尼康AF Nikkor 50 mmf/1.8 D镜头,镜头参数设置f=50 mm,F数为22。激光测距仪测量线阵CCD镜头与投影屏之间的距离L=498 mm。
2.2 系统误差标定
对系统进行标定以修正系统误差,假设线阵CCD的像素个数为:M×2,每个像素的尺寸为w,目标所占像素数为N,则目标的成像大小d为
d=Nw
(3)
根据D、d、L′、L关系:
(4)
对上式中的像素数N求导,得:
(5)
将公式(2)与公式(1)带入公式(5)中,得:
(6)
由上式可得,系统误差ΔD与目标所占像素数的误差ΔN成正比,与光学系统的放大率β成反比。
2.3 实验结果
首先对搭建好的实验平台进行系统标定,确定系统误差ΔD=-3.870 6 mm。并得到目标直径D与目标所占像素数4之间的函数关系:
D=F(N)=0.070 1×N+ΔD
(7)
假设高速运动目标表面过渡平滑,无深坑或者凸起等突变部分,长度为800 mm。为了能够较清晰地表现出目标的轮廓信息,可将目标平均分成8个截面信息。使用DMD将目标截面信息以fDMD=1.25 kHz频率投影到投影屏上,模拟V=450 km/s的高速运动目标。投影屏表面贴逆反材料,用于增强目标与背景光强的对比度。根据香农采样定理,为获取清晰完整的数据,需要设置fCCD≥2fDMD,实际中多采用4倍,本实验中即采用4倍关系。即:
fCCD=4fDMD=5 kHz
(8)
通过标定的线阵CCD测量模拟的高速运动目标。测量过程如图6所示。
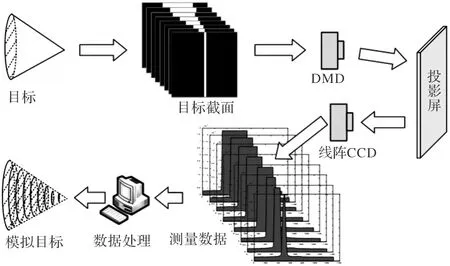
图6 线阵CCD系统测量模拟的高速运动目标测量过程Fig.6 High-speed moving target measurement process simulated by linear array CCD system measurement
经处理后获得表1所示数据。
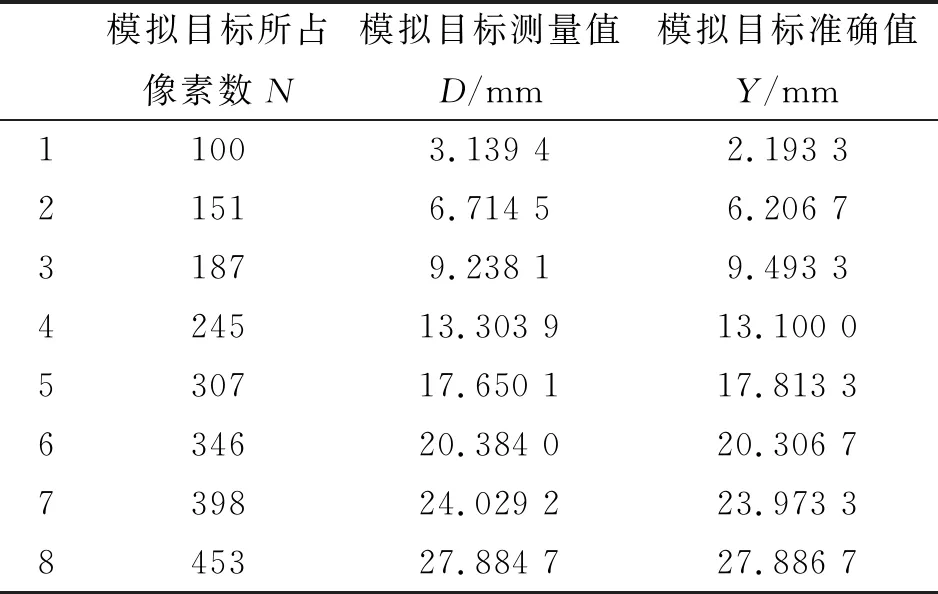
表1 fCCD=5 kHz,fDMD=1.25 kHz时测量模拟目标尺寸结果Table 1 Measurement results of simulated target size when fCCD=5 kHz,fDMD=1.25 kHz
根据获得的数据,通过公式(9),计算得到高速模拟目标的真实值与准确值之间的偏差E,偏差E与高速模拟目标准确值之比P。如表2所示。
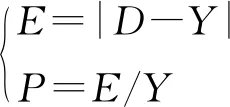
(9)

表2 偏差E与偏差百分比P的结果Table 2 Results of deviation E and deviation percentage P
依据平均偏差公式:
(10)
计算得到平均偏差值为:Eave=0.276 4 mm。
依据标准差公式:
(11)
得到标准差δ=0.402 4 mm。
绘制出偏差E与偏差百分比P的曲线图,如图7所示。
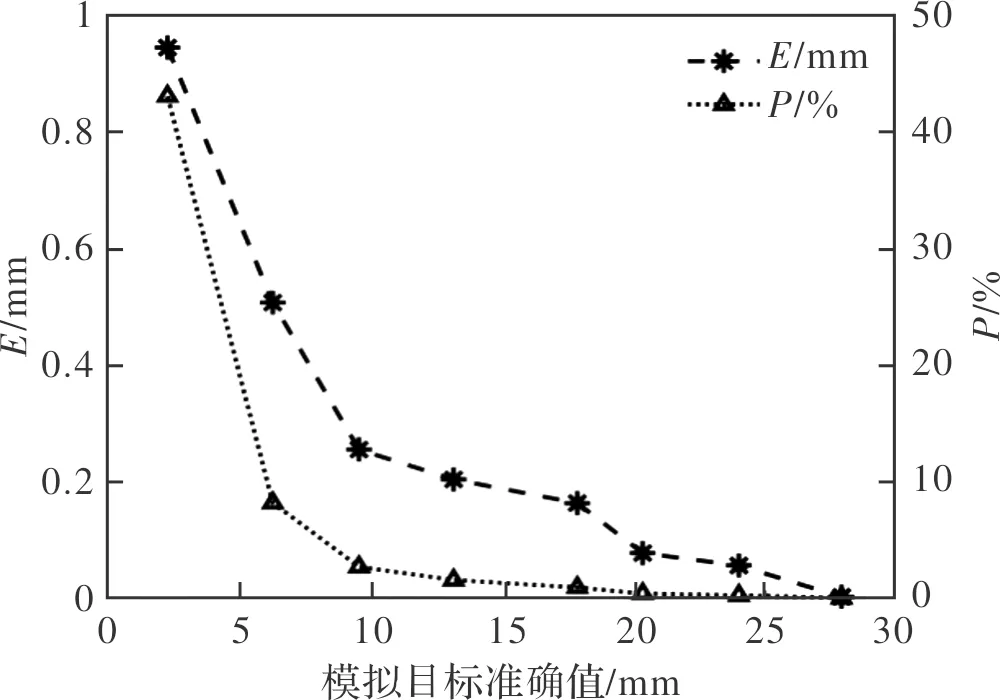
图7 偏差E与偏差百分比P的曲线图Fig.7 Curves of deviation E and percentage P of deviation
3 实验结果分析
表2与图7中数据显示,本文中所提出的基于线阵CCD像素数提取的高速运动目标形变测量方法在测量V=450 km/h的高速模拟运动目标时,其测量所得到的平均偏差小于0.3 mm,标准差小于0.5 mm,相对误差最低为0.01%。高速运动目标直径的测量值D与真实值Y之间的偏差E,偏差E与高速模拟目标真实值Y之比P,都随着高速运动目标直径D的增加而逐渐减小。图6的测量数据显示,随着高速运动目标直径D的增加,线阵CCD通过光学系统获取到目标的光强信息也逐渐增强。此时线阵CCD输出的目标强度——像素曲线跃变明显,反映为目标与背景边界更加明显的电平变化。通过本文中所介绍的像素数提取方法就能获得更加精确的像素数N值,从而通过公式(7)计算出更加精确的高速运动目标测量值D。因此将得到更小的E值与P值。
实验测试的结果与真实结果仍有部分偏差,该部分偏差是以下因素所致:1) 当高速运动目标直径D较小时,线阵CCD输出的目标强度——像素曲线过于平缓,导致目标边界点界定困难;2) 由于线阵CCD对光强响应较为敏感,环境光的变化将使线阵CCD输出的目标强度——像素曲线产生一定波动,导致目标边界点界定困难。上述测量偏差可采用以下方式缩小,如:1) 可考虑使用光学系统将较小的高速运动目标放大后测量;2) 可考虑在暗环境下或采用滤光片等抑制背景杂散光的方法测量高速运动目标。
4 结论
本文中所提出的基于线阵CCD像素数提取的高速运动目标形变测量方法能够通过DMD模拟一个高速运动目标,通过提取线阵CCD输出目标强度——像素曲线斜率变化率最大点来获取目标所占像素数N的像素提取方法获取精确的N值,并且配合线阵CCD实现对此模拟高速运动目标外形轮廓的准确测量。本文所提出的方法能够模拟速度V=450 km/h的高速运动目标,线阵CCD测量时绝对误差的平均值小于0.3 mm,标准差小于0.5 mm,相对误差最低为0.01%。本文中所提出的基于线阵CCD像素数提取的高速运动目标形变测量方法能够实现对高速运动目标形变量的准确测量。
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
燃气涡轮试验与研究(2020年2期)2020-06-20
红领巾·萌芽(2019年8期)2019-08-27
中国与非洲(法文版)(2017年10期)2017-11-23
CHIP新电脑(2016年3期)2016-03-10
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
系统医学(2016年8期)2016-02-20
印制电路信息(2015年6期)2015-12-30
