激光雷达电力巡线点云自动分类方法研究
2019-12-13 02:14:16游安清潘旭东潘文武
应用光学 2019年6期
游安清,潘旭东,赵 平,潘文武
(1.中国工程物理研究院 高能激光科学与技术重点实验室,四川 绵阳 621900;2.中国工程物理研究院 应用电子学研究所,四川 绵阳 621900)
引言
净空排查是输变电系统电力巡线[1-5]的一项重要任务,其目的是分析和发现输电线路与周围景物(尤其是不断生长的地面植被、树木等)是否有过于接近的情况,这对确保输电安全有重要意义。要实施净空排查,一个基本前提是须从激光点云中分离出电线、电塔和地物点云,只有在这个基础上,才可能对电线与地物进行距离计算。目前,业内常用的方法是借助Terrasolid等商业软件、采用人工交互式半自动的方法分类这3种点云,不仅精度有限,而且自动化程度不高、作业效率低,更重要的是,对于非测绘专业的普通用户而言,很难接手和应用。所以,很有必要设计一种智能化、全自动的点云分类方法。目前,业内学者研究比较多的是基于Hough变换或高程分析的电线提取方法[6-9],它们有两个问题:一是基本专注于电线点云的分离,而回避难度更大的电塔点云的提取;二是即便在电线提取上,测试表明,Hough变换法难以区分挨得很近的并行电线(往往将多根电线当成一根),高程分析法则对陡峭峡谷中的电线提取很容易失效(因为线侧坡面上的植被很容易高过电线)。本文针对这些问题,紧密围绕点云的全局走向统计特征进行算法设计,避免大幅依赖点云局部特征,避免使算法产生明显的局限性。实用测试表明,算法的普适性很好,不需要像其它方法那样要针对不同数据集调整算法参数,真正做到一套参数适用多片点云和一键完成三类点云的自动分类,大大提高了激光雷达内业处理的效率。
1 激光雷达巡线
激光雷达电力巡线是近年新兴的一种电力巡线方式,旨在代替传统高强度的人工爬山越岭巡线,图1是一片激光雷达电力巡线点云图。作为巡线的任务之一,净空排查的目的是检查输电线周围有没有过份接近的地物,包括违章建筑物和不断生长的地面植被等。净空排查的前提是先从点云中正确分离出电线点、电塔点和地物点,然后对电线点和地物点作距离计算,距离小于设定的净空阈值,则予报警,大于阈值,则认为输电线安全。
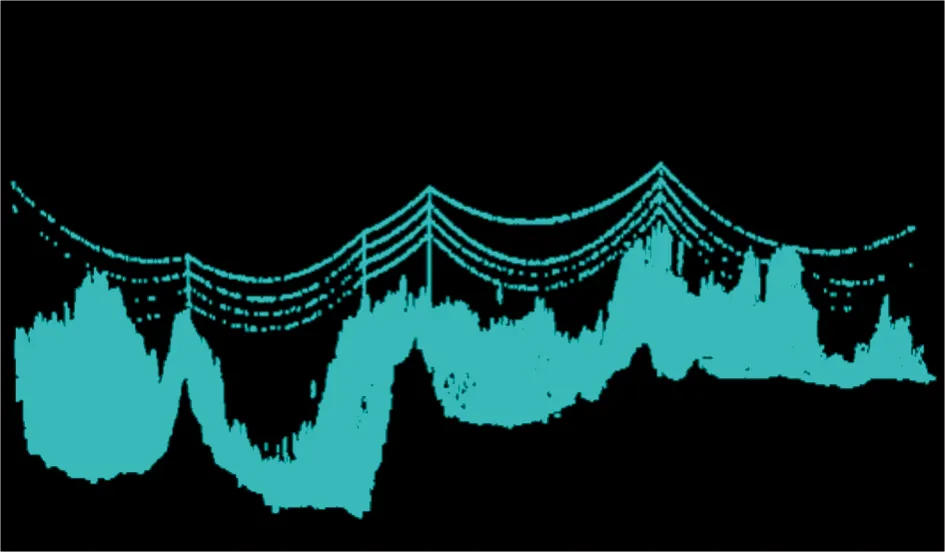
图1 激光雷达巡线点云Fig.1 Point cloud in Lidar scanning
2 点云分类算法
针对传统半自动分类方法的不足,本文设计了一种全自动分类方法,其基本思想和步骤是:
1)以两座电塔间的激光点云为输入,如图2所示。至于为何要将一条很长的电线走廊分成两座两座电塔一段,其目的不是为了迎合本文算法的要求,而是为了减少单片点云的数据量,因为一条完整电线走廊点云的点数非常庞大,可达几十亿甚至上百亿点,不便存储、传递、使用,所以,数据预处理时一般会将它们分段。

图2 两座输电塔间的激光点云Fig.2 Point cloud between 2 pylons
2)以一定尺度(比如x、y、z向分别为10 m、10 m、1 m)对激光点云空间进行三维网格化划分,把所有点云点都归入其应属的三维网格中。
3)对每个网格单元,计算格内点的走向θ和细长度S。定义走向θ为点云在xoy面内投影的主轴线方向:
(1)
式中:μpq为点云的(p,q)阶中心矩,由下式定义:
(2)
式中:n为点数;(xi,yi,zi)为点坐标;(xc,yc)为点云在xoy面内的质心,由下式计算:
(3)
细长度S定义为点云在xoy面内长、短轴长度之比:
(4)
显然,S越大,说明网格内点的分布越倾向于线型;S越小,网格内点的分布越倾向于均匀,如图3所示。所以,S是区分网格单元是电线网格还是非电线网格的有效特征。
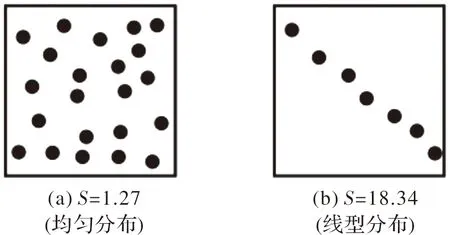
图3 不同分布点云的细长度SFig.3 Slimness of point cloud distribution
4)对细长度S求均值,并过滤出S值大于均值的网格,认为它们以电线网格为主;再对这些网格内点云的走向特征θ值作直方统计,找出直方累积量最大的θ,即为当前两座电塔间电线的主体走向。如图4所示。
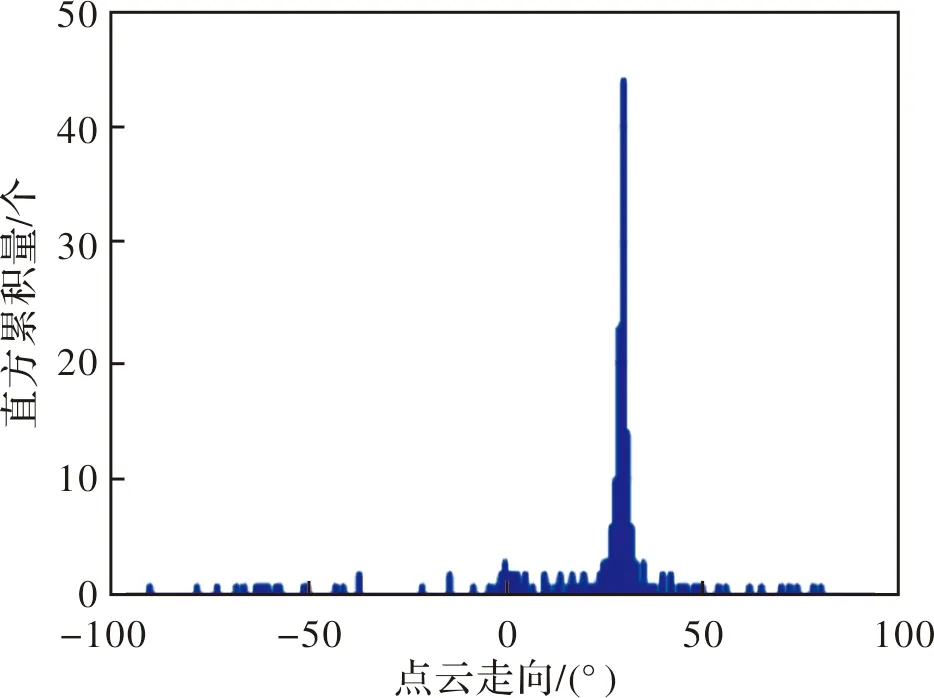
图4 网格内点云走向θ的直方统计Fig.4 Histogram of point cloud direction
5)根据电线的主体走向θ,在xoy平面内把点云旋转到左右摆正,即电线沿x轴正负向走向。对摆正后的点云重新进行三维网格划分(x、y、z向尺度分别为10 m、1 m、1 m),然后以水平方向中间段为中心,截取5段网格(左右各2段)。对每段内的点云,向yoz面内投影,并求连通簇,如图5所示(注意:图中有10个连通簇)。
6)找出最大连通簇,认为由地面点云构成。并将最大连通簇下面覆盖的所有连通簇(尤其是零星离散的小连通簇)都归入地面点云簇。如此,图5就分成了9个簇(8个悬空的,1个大片的)。将地面点簇之上悬空的点簇作为候选电线点簇。对5段点云都作这样的连通簇分析和候选电线点簇提取。计算每个候选电线点簇的质心。
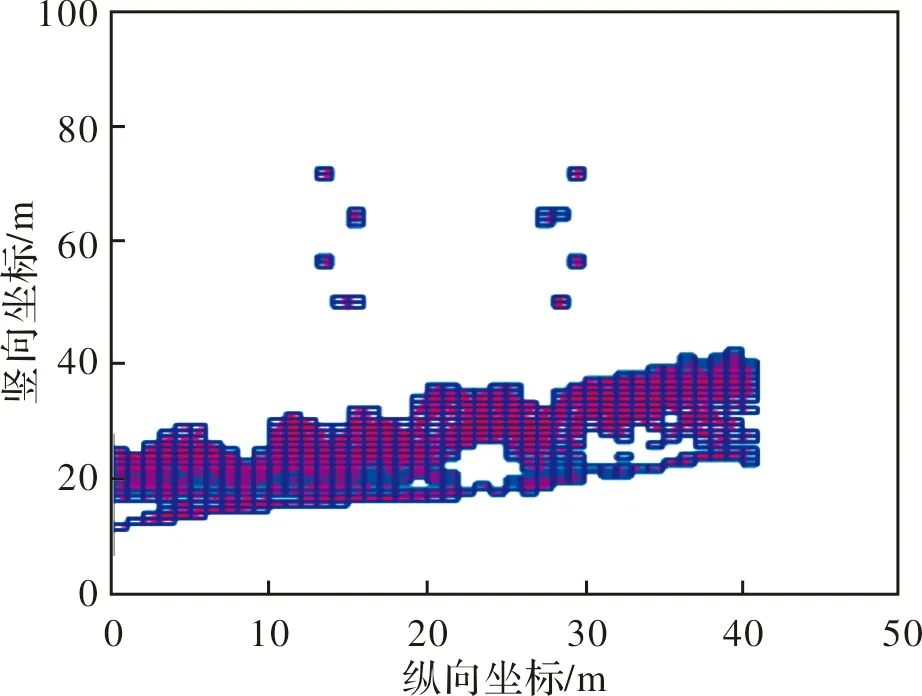
图5 点云在yoz截面内的连通簇分析Fig.5 Connection analysis of point cloud
7)设定段间候选点簇的yoz质心变化阈值(1 m),对相邻段,计算段间候选电线点簇的对应关系。对能找到对应的点簇,给它投1票。4次相邻段对应关系分析下来,能得满票的候选电线点簇作为最终确定的电线点簇,其数量即为场景中的电线数量,如图6所示,图中平滑曲线的中间段粗线即为电线种子点簇。
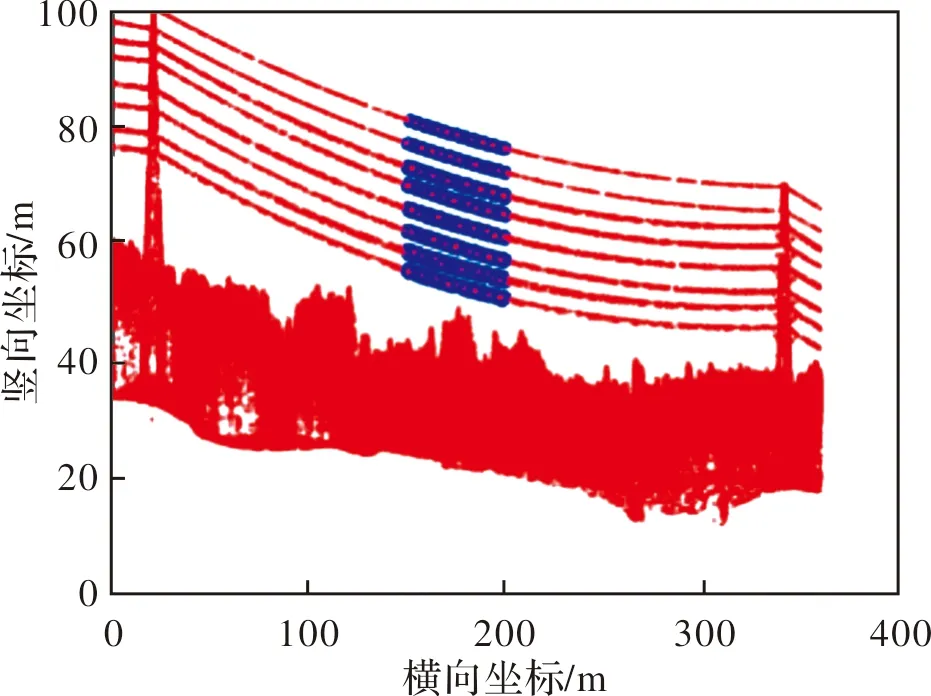
图6 电线种子点簇Fig.6 Seed clusters of power lines
8)回到三维点云场景中,以确定了的电线点簇为种子,以一定步长(3 m)向左右生长电线。生长的方法是:对种子点簇的y-x坐标作直线拟合,z-x坐标作抛物线拟合,考察左右生长点(即待吸收的散点)离这两条线的距离,如果y、z向距离都小于设定阈值(1 m),则将该点吸收进这条电线,反之忽略。其中,直线拟合(y=Ax+B)的公式是:
(5)
抛物线拟合(z=Ax2+Bx+C)的公式是:
(6)
图7中的平滑粗曲线是电线种子点簇生长得到的完整电线。
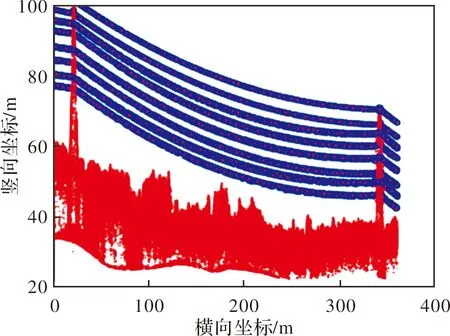
图7 电线点云生长Fig.7 Growing line point cloud
9)获得电线点云后,将所有竖直方向上低于电线、或水平方向上在两外侧电线之外的点归于地物点;高于电线最低点、且夹在两最外侧电线之间的点置为电塔种子点。如图8、图9所示(蓝色粗线为电线点,红色单像素散点集为电塔种子点)。

图8 粗分得到的电线点、电塔点和地物点Fig.8 Three sort of point cloud after rude classification

图9 电塔种子点簇(红色单像素散点)Fig.9 Seed clusters of pylon(red)
10)对每座电塔的种子点簇求质心,得到电塔中心的(xc,yc)坐标。再在x方向上截取中心位置xc左右一定范围(10 m)内的点云作为精确提取电塔的输入,如图10所示。
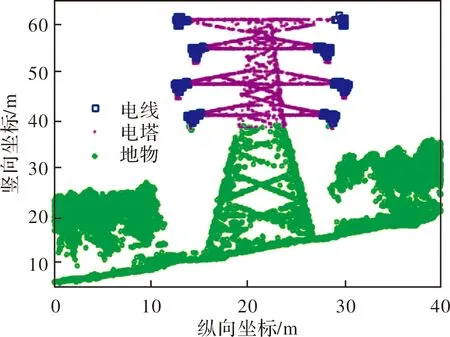
图10 单座电塔附近点云Fig.10 Point cloud around single pylon
11)在y方向上,以yc为中心,向左、右生长电塔点云,直至塔翼的翼尖,得到电塔在y方向上的宽度(称此处为塔帽宽度),并求得电塔对称轴位置,以之修正yc。再以塔帽宽度沿z方向竖直向下覆盖,把被盖住的点云纳入电塔点云,如图11所示。其中两个椭圆圈内的点云显然不应属于电塔,而是地物,下面继续分离。
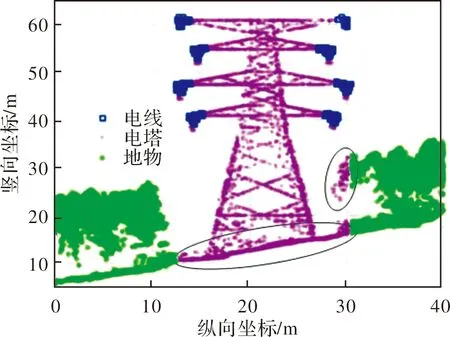
图11 电塔种子点云向左、右、下覆盖的结果Fig.11 Covering result of pylon seed point cloud
12)将电塔点云沿z向分层,并自下而上寻找点云最密层,将最密层及其下各层归入地面,这样,图11中在椭圆圈内被误分为电塔的点就被重新归入地物点,如图12所示。

图12 电塔点云中排除地面点Fig.12 Exclusion of ground point from pylon
13)再从图10的电塔种子点簇的下沿开始,向下寻找宽度突变的层,作为塔腰(定义在“宽度<塔帽宽度*70%”的部位)。如图13所示,图中黑色竖向虚直线为电塔对称轴,水平粗横直线为电塔腰线。
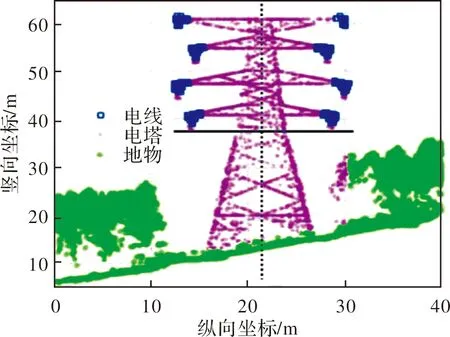
图13 电塔塔腰定位Fig.13 Positioning of pylon waist
14)对电塔点云作三维网格划分(x、y、z向网格尺度分别为0.5 m、0.5 m、2 m),取塔腰所在层的点云,得到塔腰截面点云图,如图14所示。

图14 塔腰处截面点云图Fig.14 Section point cloud of pylon waist
15)以塔腰截面层点云为种子,向下逐层生长、吸收低层电塔点云。生长的原则是:每个生长层中,被上层点云在xoy面内外包络+外扩b×tan(8°)的范围所覆盖的点,吸收进电塔点云;不被覆盖的点,归入塔外植被。其中,b=2 m为分层厚度(即上一步三维网格化时的z向尺度),8°是实际电塔自塔腰处往下逐渐外扩的最大张角(一般不超过8°)。图15是电塔生长的最终结果,可以看出,图11中小圆圈内被误分为电塔的点在这里被排除在外而重新归入地物点。图16是图9中另一座电塔点云生长的结果。至此,电线、电塔点云都被成功分离出来了,剩下的就是地面及植被点云,图17是整个点云分类的结果。
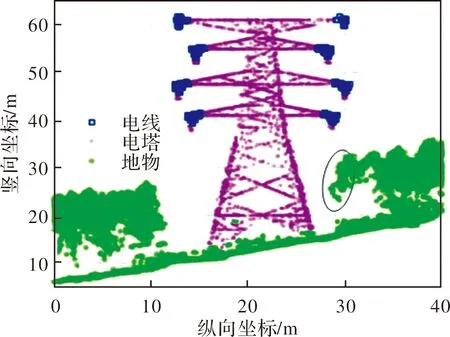
图15 电塔点云生长的结果Fig.15 Result of pylon growth
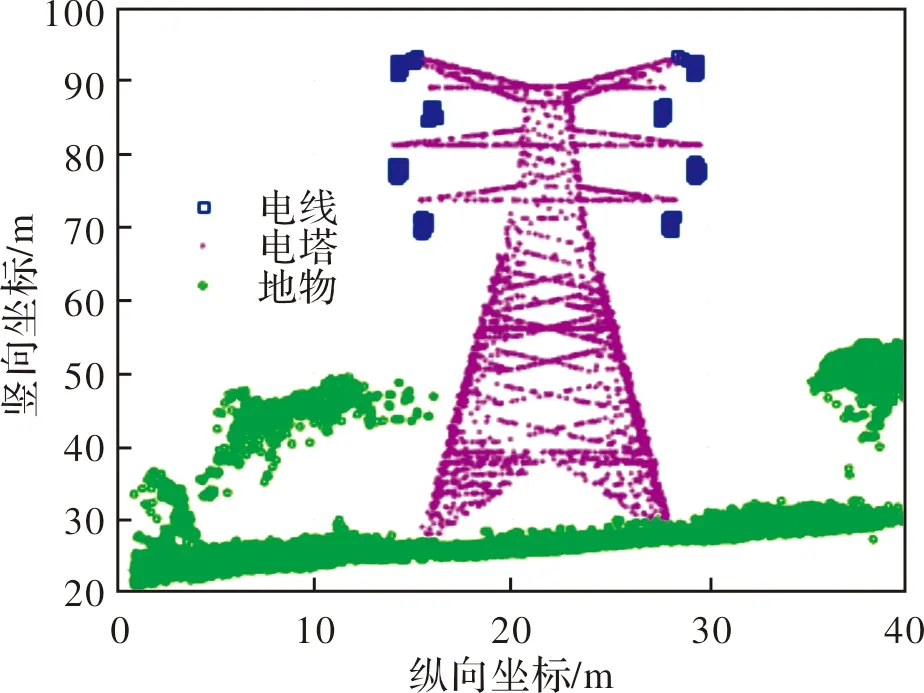
图16 另一座电塔点云生长的结果Fig.16 Result of another pylon growth

图17 整个点云分类结果Fig.17 Result of the whole point cloud
图18是对国家电网另一段(共测试了不同项目的14段)激光雷达巡线点云分类结果。

图18 另一段激光巡线点云分类Fig.18 Result of another point cloud
通过自研软件三维、多角度观察分类后的点云发现,电线、电塔和地物点几乎都得到了完美区分。速度测试上,本算法对一个100万点的激光点云,在一台i5 3.6 GHz的电脑上,实现电线、电塔、地物点分离,用时不到1秒,比人工交互式分类的效率高出很多(人工方法对于同样的数据量、得到基本相同的分类精度,平均用时约1 h)。
3 结论
本文从净空排查所需的点云分类入手,设计一套基于点云全局走向统计特征的全自动分类方法,可以将两座输电塔之间的激光点云快速、精准地分成电线、电塔和地物点三类,为净空排查距离计算提供了基本前提。测试表明,本方法精度好、效率高,能做到一套参数适用于多片点云和一键完成自动分类。
本方法的不足之处在于:对点云密度有一定的依赖性,并不适用任意稀疏或明显残缺的电线点云的提取。目前的算法版本能够适用于每平米不少于10个点的激光点云数据,这个点云密度对于目前常用的无人机载激光雷达巡线系统是比较容易达到的。明显稀疏或残缺的点云主要出现在非常陡峭的深沟峡谷中的电线(出于安全因素考虑,飞行作业距离难以控制到合适位置),这种情形的适用性将是本算法下一步改进的重点。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
中国电业与能源(2021年4期)2021-05-22 00:39:42
广西电业(2020年11期)2020-03-23 07:14:14
娃娃乐园·综合智能(2019年6期)2019-07-10 00:37:32
中国交通信息化(2019年1期)2019-03-26 06:43:46
意林·全彩Color(2018年9期)2018-10-12 01:07:08
电子制作(2018年16期)2018-09-26 03:27:00
无人机(2018年1期)2018-07-05 09:51:06
创新作文(小学版)(2016年13期)2016-11-11 05:46:29