
基于红外图像的打击效能评估研究
2019-12-13 02:13曹奕涛邱亚峰
应用光学 2019年6期
顾 捷,仇 杰,曹奕涛,邱亚峰
(1.南京理工大学 机械工程学院,江苏 南京 210094;2.上海机电工程研究所,上海 201100)
引言
国家领土主权长期以来都是各个国家关注的焦点,为了更好地保护领土主权,近年来各个国家都在为无人值守的重要岛屿及军事基地努力研发一种可以自动进行跟踪锁定、敌我识别、打击评估以及实施自动打击的新型模块化武器系统。
现有的自动打击武器系统主要有两种:一种是针对区域打击的大规模杀伤型武器如火炮、导弹等,这类武器系统的特点在于杀伤面积大、针对的目标区域大,从而容易提取到目标区域的特征信息,便于进行打击评估反馈;另一种是针对人体的轻武器如步枪、机枪等,这类武器系统的特点在于针对的目标灵活且隐蔽性高,难以对目标进行准确的跟踪锁定及打击评估反馈。由此可见,自动武器系统研究的重点在于对目标进行打击效能评估反馈。国外对此研究较早,技术相对成熟,在伊拉克战争中美军使用的BDA目标毁伤效果评估就是在每一轮打击完成后,快速反应,迅速做出下一轮打击决策[15];澳大利亚学者曾研究出一种基于无人机通过红外图像以及雷达探测生命体特征的打击效果评估。国内对自动打击的打击效能评估研究较少,其中张金洋[10]对面向损伤评估的数字化人体建模进行研究,是针对战后人体损伤进行的评估,不具有实时性。
随着红外成像技术的发展,红外设备的应用越来越广泛。可以通过获取红外图像上人体的特征信息并对特征信息的变化进行数字化评价,从而得到打击效能评估,这种方法所需要的侦查系统简单,同时便于信息的实时传输与处理。
1 系统组成
新型自动武器系统是由全电驱动的枪塔和自动操控显示单元两部分组成,枪塔上集成红外探测系统、驱动组件、武器系统[1-4];自动操控显示单元包括计算机、显示器、评估软件等[9]。
1.1 总体结构
利用三维软件对自动枪塔模型进行结构设计和各部分零件三维建模、装配,得到自动枪塔的三维模型图,如图1所示。枪塔是由机枪1、红外观瞄箱2、俯仰传动机构3、方位传动机构4、枪塔底座5等其他结构组成。其中俯仰传动机构通过齿轮副传动实现机枪-10°~+60°俯仰角的调节,通过在极限位置处加装传感器的方式实现自动限位;方位传动机构则是通过齿轮副传动实现机枪n×360°方位角的调节[5-8]。
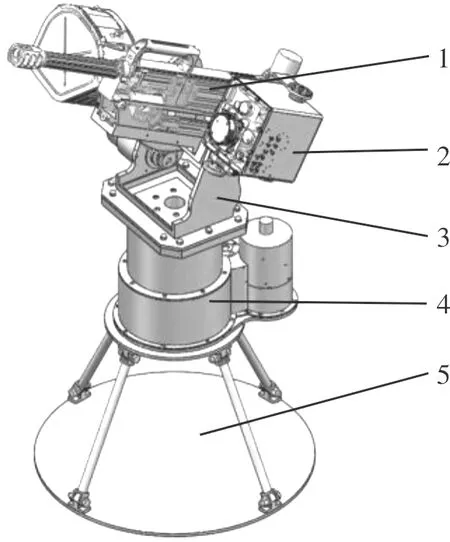
图1 自动枪塔三维图Fig.1 3-D diagram of automatic gun tower
1.2 视频传输模块
红外观瞄箱是实时传输红外视频图像的系统,其框图如图2所示。其中视频处理模块由视频解码器电路、视频编码器电路、FPGA、非易失性存储器等组成;显示模块是主机显示器;电源管理模块包括开关电源、各路电源使能控制等;无线通信模块采用nRF24L01芯片能实现无线视频传输。

图2 系统框图Fig.2 System block diagram
2 打击效能评估研究
2.1 打击效能评估概述
随着信息化武器的发展,指挥自动化过程愈发受关注。打击效能评估是该过程的重要一环,系统框图如图3所示。基于红外图像的打击效能评估是通过分析红外观瞄箱中实时传输的红外视频图像,推理出被打击目标丧失战斗能力的程度。
现代战场环境越来越复杂,各种信息源具有极大的不确定性,加上被打击目标的隐蔽性与欺骗性,打击效能评估的难度很大。在实际作战过程中,只有及时、准确地评估才能优化自动枪塔的资源,取得最佳的作战效果。
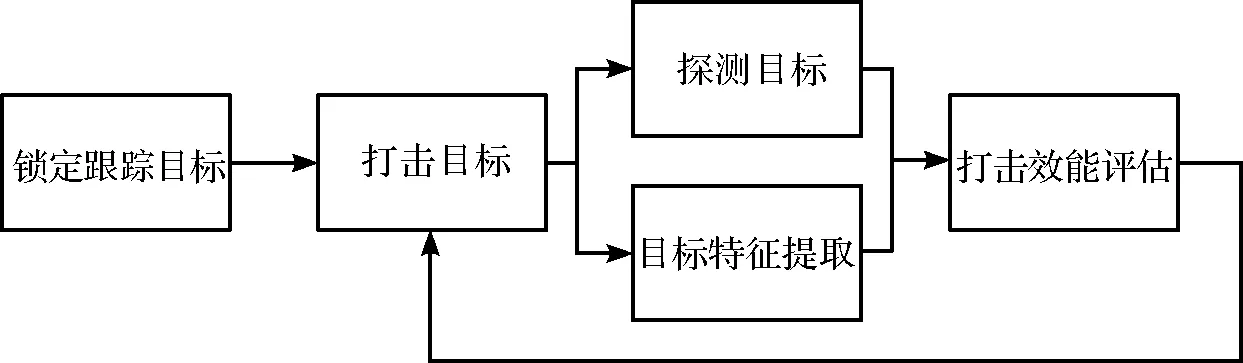
图3 打击效能评估系统框图Fig.3 System block diagram of attack effectiveness evaluation
2.2 打击效能评估准则
根据红外图像来进行打击效能评估,需要制定相应的打击效能评估准则。从红外图像上获取信息来推测被打击目标丧失战斗能力程度,红外图像需要具备较高的精度,而对图像精度影响最大的因素就是距离。当被测目标与自动枪塔之间的距离较近时,被测目标所占像素点多,反映出的信息量也就越大,越容易捕捉被测目标的特征信息。但是当被测目标与自动枪塔之间的距离较远时,被测目标所占像素点少,所能获取到的信息越少,特征也越难捕捉。
根据镜头投射原理公式可知:
(1)
式中:f为镜头焦距(选用25 mm~75 mm变倍镜头);D为镜头与物体之间的距离(单位:m),h为像的高度尺寸(单位:μm);H为人体实际高度(按人体身高1.8 m计算)。
如果需要看清整个人体,人体在画面上的高度应占画面总体高度的2/3;如果需要进行识别则人体在画面上的高度应不小于画面总体高度的1/10(这里探测器的红外分辨率为640×512像素、像元尺寸为15 μm×15 μm。
根据公式(1)计算可得:在25 mm~75 mm变倍镜头下,需要看清整个人体的距离D满足8.5 m≤D≤25.5 m;进行识别人体的距离D需要满足58.6 m≤D≤175.8 m。
距离在很大程度上影响打击效能评估的精度,因此针对不同的距离需要制定不同的打击效能评估准则。针对识别距离在25 m以下的,制定近距离打击效能评估准则;针对识别距离在25 m~170 m之间的,制定远距离打击效能评估准则。
1) 近距离打击效能评估准则
在近距离打击效能评估准则中,将人体划分成若干个部分,当子弹击中每个不同部位时,对人体毁伤程度是不同的。将人体毁伤分为6个等级(1级伤害最低、6级伤害最高),如图4所示为人体不同部位毁伤程度,等级划分如表1所示。
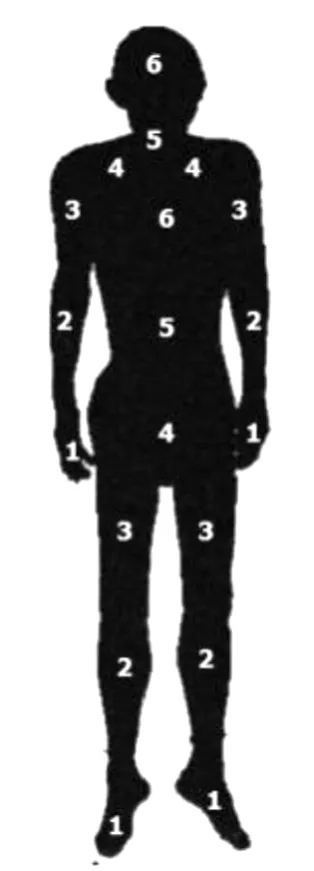
图4 人体各部位受伤等级图Fig.4 Injury degree map of various parts in human body

表1 不同部位毁伤程度等级划分表Table 1 Classification of damage degree in different parts
以上表示单个部位受到子弹打击后的毁伤程度。如果被打击目标多个部位受到毁伤时,其毁伤等级将会提高。因此对每一个部位的损伤情况进行判定评估得到单个部位的损伤等级SDI。采用平方根得到综合损伤评估结果,即综合损伤指数CDI[10]。
单个部位受伤后的损伤等级SDI公式[10]如下:
SDI(i)=Dmin(i)+F(i)·(Dmax(i)-Dmin(i))
(2)
(3)
式中:Dmin为最小毁伤等级;Dmax为最大毁伤等级;F(i)为面积系数;S(i)为第i个部位的损伤面积比例;α为第i部位的临界面积系数(其取值为0~1);St(i)为第i个部位的总面积比例。
综合损伤指数CDI公式[10]如下:
(4)
根据综合损伤指数CDI的值分成以下几个层次,作为近距离打击效能评估值,如表2所示。如果打击效能评估值大于3,说明目标丧失战斗,无需进行再次打击;如果打击效能评估值小于或等于3,说明目标仍存在战斗力,仍能产生威胁,需要进行再次打击,直到目标死亡或者丧失战斗力。
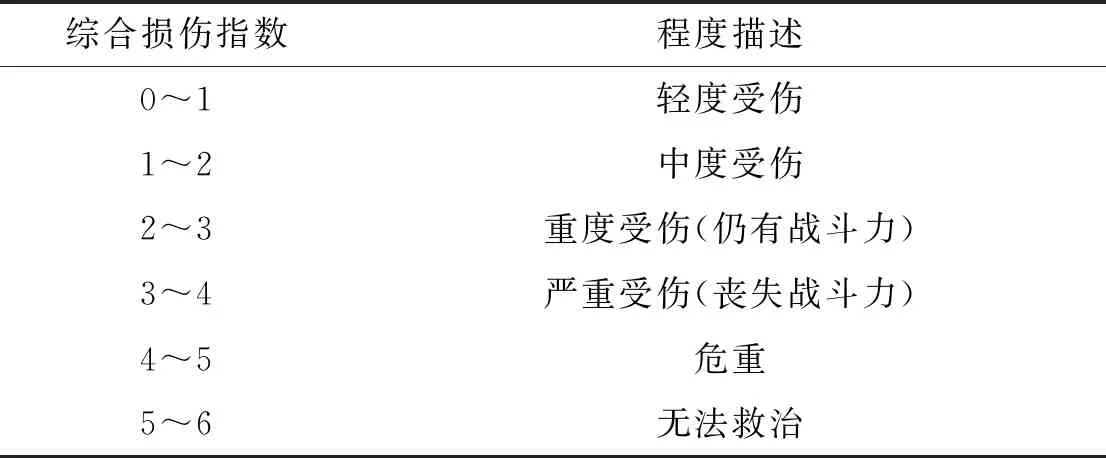
表2 综合损伤等级划分表Table 2 Comprehensive damage degree classification table
2) 远距离打击效能评估准则
在远距离打击效能评估准则中,由于被测目标所占像素点少,所能捕获的特征少,因此需要结合多种影响因素判断被测目标丧失战斗力的概率。影响因素主要有位移、姿态、距离、辐射谱差异、重复打击、时间和弹药消耗等。在这些影响因素中如时间、弹药消耗可视为影响评估系数。
位移因素影响下打击效能ε1公式如下:
(5)
式中:n1为未产生位移变化的目标个数;N为一次锁定跟踪目标的总数。
姿态因素影响下打击效能ε2公式如下:
(6)
式中:n2为未产生姿态变化的目标个数。
距离因素影响下打击效能ε3公式如下:
(7)
式中:Lm为临界距离;L为目标距离。
辐射差异因素影响下打击效能ε4受到火力打击后,因热力效应的作用,目标辐射谱一般要有较大的改变,辐射谱不同程度的变化可以反映不同程度的目标毁伤[11-12],公式如下:
(8)
式中:n4为未产生辐射差异的目标个数。
重复打击因素影响下打击效能ε5,对于同一目标人群,随着打击次数的增加,打击效能也会增加,公式如下:
(9)
式中:α、β分别为重复打击后的打击效能提高系数(其取值为1.1~1.5)。
弹药消耗影响系数μe,随着弹药量的消耗,自动枪塔会降低打击的频率,从而影响打击效能评估的准确性,公式如下:
(10)
(11)
式中:ηe为弹药消耗率;Ae为弹药消耗量;A为总的弹药量。
时间对于打击效能评估的准确性的影响极大,评估的时间越长,其评估的可信度也就越高。但是由于打击效能评估是实时的,评估时间不能过长,因此需要建立关于时间的影响系数μt,公式如下:
(12)
(13)
式中:T为有效时间;Tm为固定时间;λ为时间修正系数(其取值为20)。
由于实际情况比较复杂,因此需要综合多种影响因素判断被测目标丧失战斗力的概率。综合因素下的打击效能ε公式如下:
(14)
远距离下的打击效能评估准则是针对跟踪锁定的一组目标丧失战斗能力的概率统计,因此仅有当该组目标全部丧失战斗能力时,自动枪塔才会停止再一轮打击。
假设同时跟踪N个人(1≤N≤5),理论上目标全部丧失战斗力情况下的打击效能评估值η区间为:42×N/(N+1)≤η≤42;
有(N-1)丧失战斗力的打击效能评估值η区间为:42×(N-1)/(N+1)≤η≤42×N/(N+1);
有(N-2)丧失战斗力的打击效能评估值η区间为:42×(N-2)/(N+1)≤η≤42×(N-1)/(N+1);
以此类推,有0个丧失战斗力的打击效能评估值η区间为:0≤η<42×1/(N+1)。
3 实验结果及分析
为了对所提出的远距离打击效能评估准则进行验证,利用Matlab编制软件,将评估准则转化成程序,并且进行打击效能评估实验,软件界面如图5所示。实验人员A、B、C模拟0人、1人、2人丧失战斗力的情况,由测试人员进行红外图像以及红外视频的拍摄,将采集到的图像及视频导入到自制软件中进行实验。
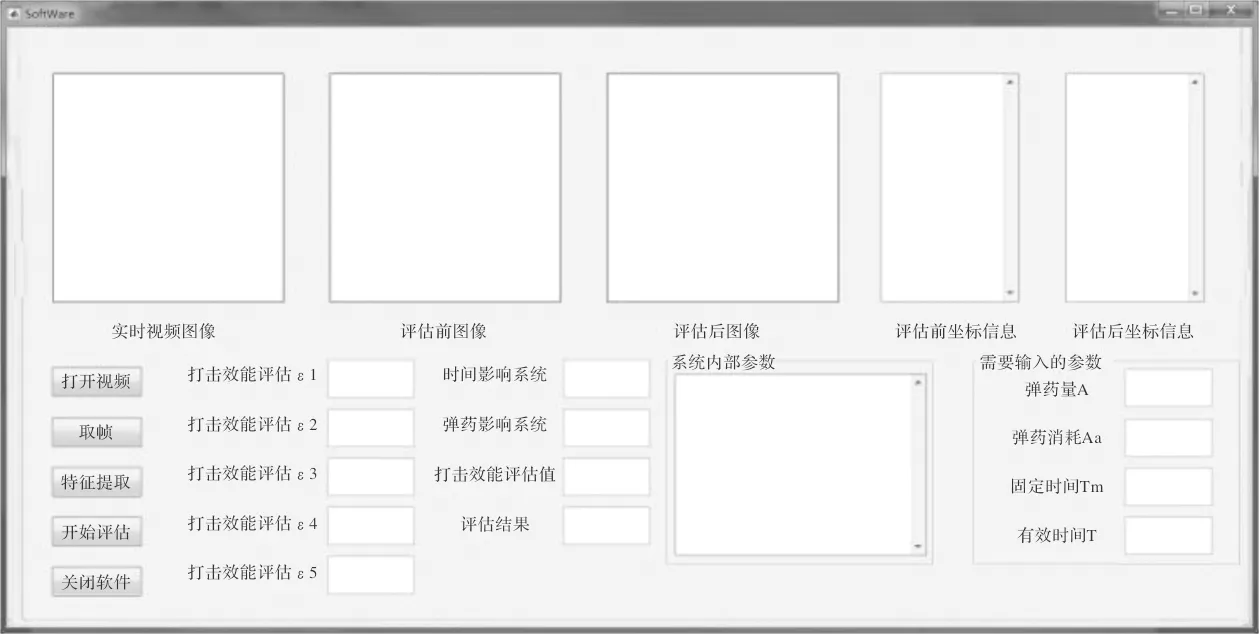
图5 软件界面图Fig.5 Software interface diagram
3.1 图像处理
对采集到的图像进行处理,进行中值滤波。中值滤波的作用在于尽量保留图像细节特征的条件下对目标图像的噪声进行抑制[13],中值滤波器使用排序统计学中的某种参数估计器来完成滤波运算。所有的排序统计估计都是基于信号样本按幅值排序后的估计样本矢量,来构造它们的运算的,即:
X=[x1,x2,…,xn]T→X(s)=[x(1),x(2),…,x(n)]T
(15)
式中:x(i)代表排序后第i个样本值。滤波的运算针对[x(1),x(2),…,x(n)]T,一般只考虑幅值秩序信息,而不考虑位序信息,滤波后的图像如图6(b)所示。
然后进行二值化处理,使图像中数据量大为减少,从而能凸显出目标的轮廓。二值化通常的方法是设定一个全局的阈值T,用T将图像的数据分成两部分:大于T的像素群和小于T的像素群。将大于T的像素群的像素值设定为白色(或者黑色),小于T的像素群的像素值设定为黑色(或者白色)。二值化处理如下:

(16)
式中:T为阈值。二值化后的图像如图6(c)所示。
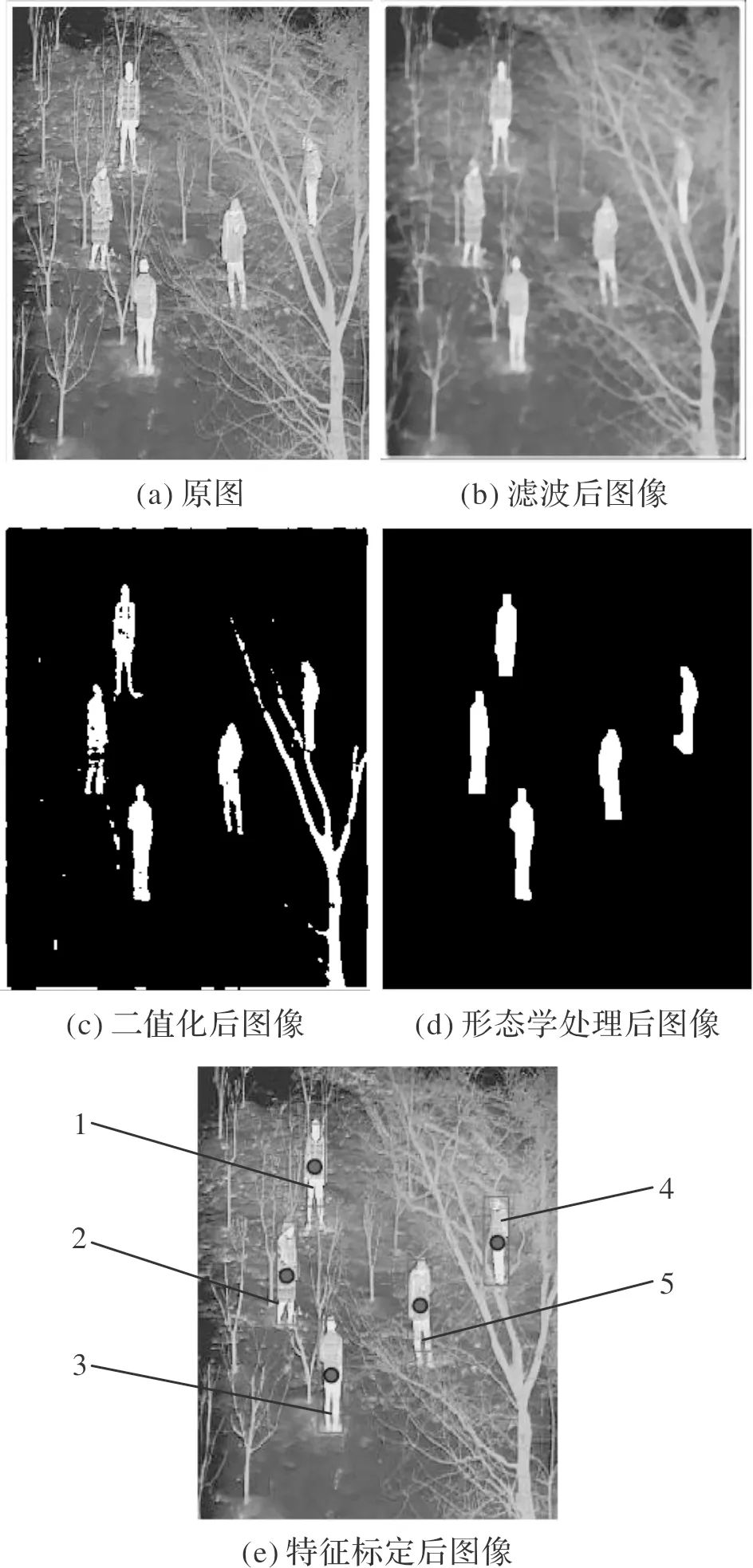
图6 图像处理过程Fig.6 Image processing
最后进行形态学处理,进行特征提取。形态学处理主要包括形态学开运算与闭运算,开运算的功能在于消除小物体,在纤细处分离物体;闭运算的功能在于排除小型空洞(黑斑)。
开运算是使用结构元素B对集合A的开操作,用B对A腐蚀,然后用B对腐蚀结果进行膨胀,即:
A∘B=(AΘB)⊕B
(17)
闭运算是使用结构元素B对集合A的闭操作,用B对A膨胀,然后用B对腐蚀结果进行腐蚀,即:
A∘B=(A⊕B)ΘB
(18)
形态学处理后的图像如图6(d)所示,将提取出的人形特征在质心处标定坐标,其效果如图6(e)所示,提取到的坐标信息如表3所示。
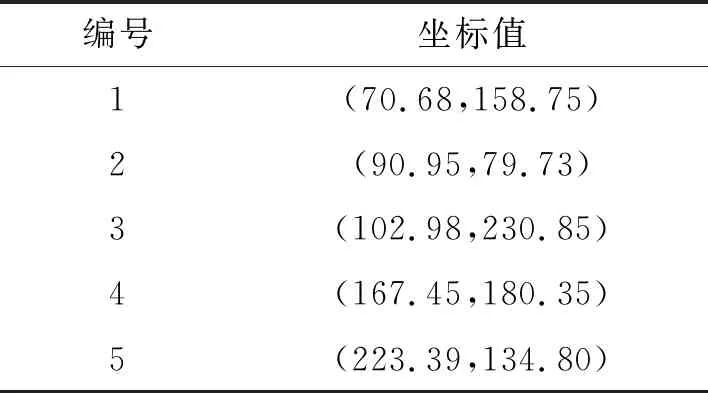
表3 质心坐标数值列表Table 3 List of centroids coordinates values
3.2 视频测试实验
由于上述打击效能评估准则是在静背景下提出的,因此视频测试实验中,拍摄时固定红外设备,让实验人员分别模拟0人丧失战斗力、1人丧失战斗力、2人丧失战斗力的情况。由于该实验设备并不是搭载在自动枪塔上,这里暂时不考虑时间影响因素以及弹药消耗影响因素,那么所得到的打击效能评估值ε′为
(19)
如图7(a)~7(c)所示分别为2人、1人、0人丧失战斗力的情况。从图像中成功标定出被测目标,并提取到目标的位置等特征,通过对比打击前后图像中的目标特征[14],分析计算出打击效能评估值ε′。其打击效能评估值为别为29.2、24.9、6.6。

图7 软件实验结果Fig.7 Software experimental results
3.3 实验结果分析
理论与实验评估值如表4所示。从表4中可以看出2人丧失战斗力的情况、0人丧失战斗力的情况实验评估值与理论评估值相匹配,而1人丧失战斗力的情况的实验评估值偏大。造成实验评估值有偏差的原因可能在于:对评估前后目标的中心点的特征提取有偏差,导致特征比较出现偏差,从而影响评估值,模拟实验与实际情况存在其他因素的干扰导致评估值的偏差。总体上来说理论评估值与实验评估值还是相匹配的,存在的偏差需要通过修正各参数系数来修正偏差值,修正后参数对比结果如表5所示。

表4 修正参数对比表Table 4 Comparison table of correction parameter

表5 理论与实验评估值对比表Table 5 Comparison of theoretical and experimental values
4 结论
本文重点对基于红外成像的打击效能评估进行研究,提出了近距离与远距离的评估准则,并通过计算机编程对远距离评估准则进行了数字实验验证。通过自制的Matlab软件进行仿真实验,对远距离的评估准则进行3人目标的实验测试。从实验结果可以看出,2人、1人、0人丧失战斗力在修正前打击效能评估值分别为29.2、24.9、6.6,修正后打击效能评估值分别为24.8、20.3、4.6,符合提出的打击效能评估准则,验证了提出的打击效能评估准则,具有一定的理论指导意义和工程应用价值。
猜你喜欢
环球时报(2022-05-23)2022-05-23
活力(2021年6期)2021-08-05
金桥(2021年4期)2021-05-21
课外生活(小学1-3年级)(2020年3期)2020-05-19
数学物理学报(2020年1期)2020-04-21
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
少儿美术(快乐历史地理)(2019年12期)2019-04-20
系统工程与电子技术(2016年7期)2016-08-21
共产党员(辽宁)(2015年24期)2015-10-18
