
基于激光光斑分时方法的弹目测角途径设计
2019-12-13 02:13陈文建孙卫平丁天宝雷俊杰段园园韩耀锋
应用光学 2019年6期
陈文建,孙卫平,丁天宝,雷俊杰,段园园,李 刚,韩耀锋
(1.西安应用光学研究所,陕西 西安 710065;2.西安现代控制研究所,陕西 西安 710065; 3.西北机电工程研究所,陕西 咸阳 712099)
引言
对同一目标发射多枚导弹是提高毁伤率的措施,对这些导弹与目标的偏差角测量(简称弹目测角)是实现制导的基础[1-2]。导弹安装有标识光源(示踪器),以便地面制导仪确定它和目标的夹角[3],并依此控制导弹[4],对多枚导弹测角的难点在于示踪器光点经常交叉重叠,导致光电系统难以辨别[5-6]。
用不同光谱的示踪器区分逐次发射的多枚导弹,是一种直观的途径[7-8],但要增加弹种,且需制导仪设置不同的光谱通道和接收传感器,发射时还要对不同波长的导弹进行编组吊装,操作繁琐,成本高。为此,设计了一种示踪器分时发光的测角途径,用一个弹种来实现多枚导弹的同时制导。
1 弹目测角
发射车与目标之间的联线为目标轴,发射车与导弹之间的联线为弹标轴,电视轴线为瞄准轴;制导时,瞄准轴不断地向目标轴追踪,弹标轴不断地向瞄准轴追踪,当导弹飞抵目标处时,三轴重合,击中目标[9-10]。
2 光斑分时探测辨别双弹的原理
2.1 弹目测角和目标跟踪共用摄像机方法
借助制导仪的摄像机,利用光斑分时探测的方法完成区分双弹(或多弹)的原理如图1所示,示踪器AB向地面发射脉冲光序列,摄像机在跟踪目标同时,也获取来自示踪器的激光光斑[3],通过图像编组,获得A弹、B弹和目标的图片序列,将其送抵图像解算单元,后者既解算出目标和视轴的偏角,又解算出导弹和目标的夹角,即同时完成对目标的测偏和导弹的测角(弹目角),目标偏角用于对目标的电视跟踪,弹目角则分别上传对应的导弹,形成闭环修正。
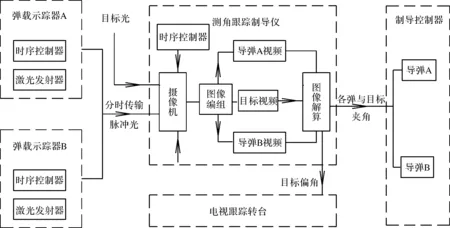
图1 弹目测角和目标跟踪共用摄像机原理Fig.1 Principle of camera sharing for missile target angle measurement and target tracking
示踪器上和摄像机均装有时序控制器,可实现示踪器的闪光和摄像机曝光的同步。在提高信噪比的同时,又便于图像编组,即获得目标和两枚导弹各自的图片序列流,这种简洁的图片使图像解算电路很容易地输出目标偏角和多枚导弹的弹目夹角。
2.2 基于编组模式的序列图像获取
图片序列获取的原理为(以区分2枚为例,多枚同理),摄像机跟踪目标成像,先后发射的2枚导弹也出现在视场中,导弹和摄像机在时统信号控制下,完成激光发射与成像曝光的同步[11],在导弹发射前完成的同步信息号设置,可使得2个导弹交替发光,或在某段时间内均不发光,因此可实现如下效果:摄像机在第一帧成像时,2枚导弹均不发光,所获图片为目标图像,在第2帧成像时,首枚导弹发光,次枚导弹不发光,所获图片为首枚导弹的图片(示踪器亮斑掩盖了目标),在第3帧成像时,首枚导弹不发光,次枚导弹发光,所获图片为次枚导弹的图片;通过图片编组,将1/4/7…、2/5/8…、3/6/9…、形成3种图片序列,送到相应的显示器,便形成了目标、首枚导弹和次枚导弹三者的连续图片序列,对每个序列的图片进行图像解算,便可同时得到目标跟踪和导弹制导所需信息。
3 探测能力计算
半导体激光器发光效率高,既能满足弹载环境要求,又可发射CCD响应度较高的光谱[12](808 nm波长);该激光器有很大的发散角,因此,在导弹飞行时出现摆动和旋转时,地面制导仪仍能够接收到光斑,且可通过阵列激光器合理的分布来提高整个光斑的均匀性。
根据系统要求和成本分析,准连续高功率半导体激光器峰值功率为P=3 000 W,发射角为θ=48°×12°,脉冲宽度100 μs;旨在实现接收相机口径90 mm,无雨雪条件下,传输距离为L=10 Km。
在上述条件下,按如下公式可计算出摄像机处的光功率密度[13-14]:
式中:P1为摄像机探测器接收到的激光功率密度;Pt为光电信标发射的激光峰值功率;Tα为大气透过率;η为修正因子;θ1为光电信标激光水平发散角;θ2为光电信标激光俯仰发散角;R为光电信标作用距离;修正因子主要对光电信标发射激光光斑的均匀性进行修正,其取值最大为1,根据光斑均匀性优劣,选取该修正因子[15]。
计算结果:功率密度为1.181×10-7W/cm2,大于相机响应阈值,考虑激光脉宽和摄像机接收光学系统增益,系统还有一定裕度。
4 验证试验
4.1 能量和束宽角验证
用选定相机接收订制光源。光源峰值功率为3 000 W,频率50 Hz, 相机帧频120 Hz,分辨率1 024×768,谱段 0.6 μm~1.1 μm,口径90 mm,没有进行光谱滤波。
在能见度1 km,雾霾系数PM 2.5=290条件下,探测距离3 km,说明雾霾对0.808 μm衰减相当严重。
雾霾系数PM 2.5=120条件下,进行9 km传输,镜头遮挡一半即可探测。
上述环境下进行的1 km距离光源覆盖角度试验证明:俯仰40°、方位45°光束边缘可探测。
功耗和连续工作测试结果也在设计范围内。
4.2 双弹区分原理验证
在试验室内,搭建如图2所示的控制电路,设置红绿两种颜色光源,发光频率50 Hz,两者发光相位差为180°,设置相机曝光频率100 Hz,编码精度为1 μs。在同步控制信号作用下,实现奇偶帧成像曝光,将奇数帧图像按顺序播放,视频中仅有红光在亮,将偶数帧播放,视频中只有绿光灯在亮,可见编组显示是可行的。
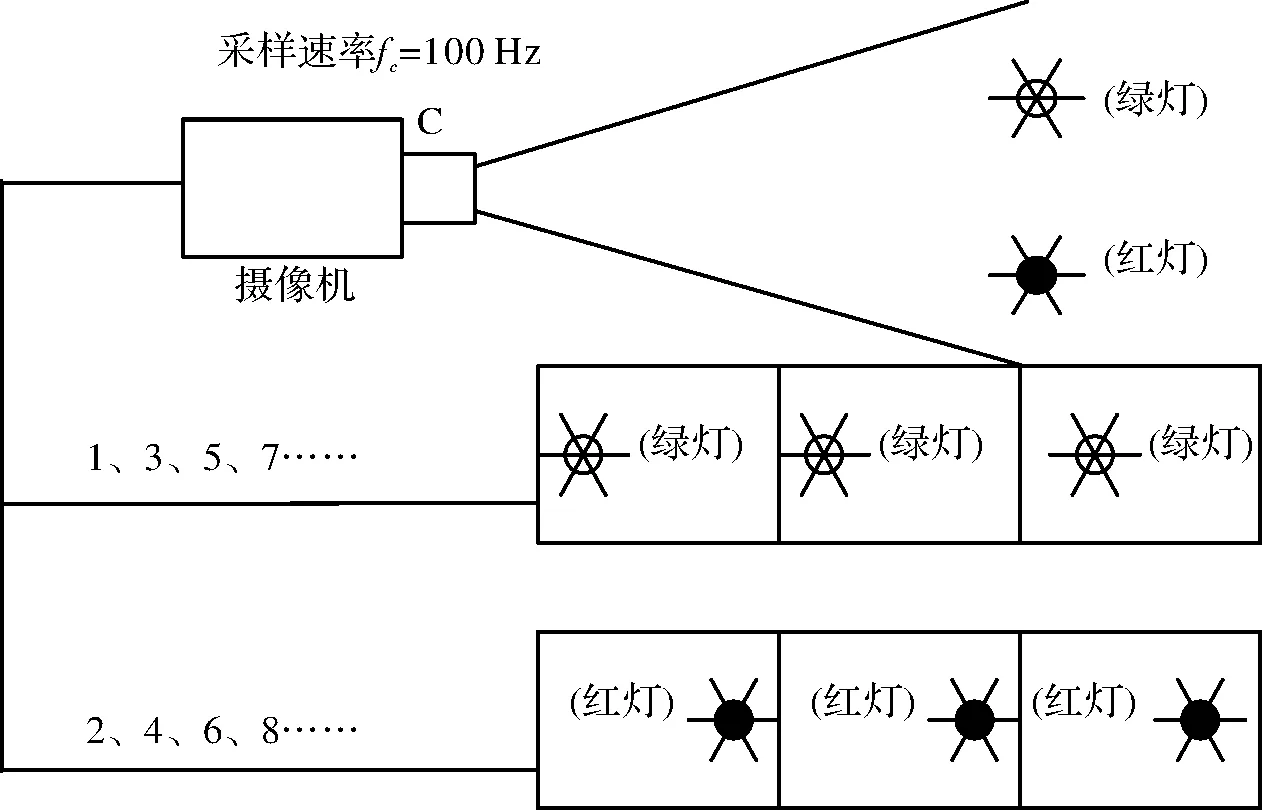
图2 双弹区分验证试验原理图Fig.2 Principle diagram of double-missile distinction verification test
5 结论
依托成像探测和激光技术,可支撑制导总体完成性能提升,这一目标通常需新的构思方能实现。该构思通常要具备集成化、小型化、低成本和高指标等优势,其过程充满复杂和艰辛。本文提出的用激光光斑进行弹目测角途径,就是一种另辟蹊径的探索。所构建的利用示踪器对多枚导弹区分制导的模式,借鉴了一些飞行试验素材,也考虑了初/末两个制导段的视场衔接和烟雾干扰等约束条件,虽经过了地面原理验证和距离试验,但在弹载可靠性和平台适应性等方面尚有大量的研究待实践。
猜你喜欢
铁道通信信号(2020年10期)2020-02-07
阅读(高年级)(2019年9期)2019-11-15
科技风(2019年27期)2019-10-20
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
厦门理工学院学报(2016年1期)2016-12-01
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
中国医疗美容(2015年1期)2015-07-12
