
永磁同步电机调速系统的滑模控制研究
2019-12-10 09:30吕敬高宋铮
中国科技纵横 2019年20期
吕敬高 宋铮
摘 要:本文主要研究了一种可以降低调速系统误差的滑模控制系统,本系统以控制过程中产生的动态误差为性能指标的控制方法,在此基础上建立最优切换函数,并采用最优控制理论对滑模控制器进行设计。用该方法设计的滑模控制系统,通过滑模面斜率的连续变化,能够加速系统状态变量到达滑模面的过程,极大地提高对参数摄动和外部干扰的鲁棒性。仿真结果表明,该时变滑模面控制方法使系统具有无超调、快速、稳定等优点。
关键词:永磁同步电机;调速系统;滑模控制
中图分类号:TM351 文献标识码:A 文章编号:1671-2064(2019)20-0062-02
0 引言
随着伺服系统的研发,其精度高、速度范围宽的有点极大的方便了永磁同步电动机控制系统的制作。加上其模型变量的非线性和强耦合性,使其能够适用于各种复杂环境,但是,由于其电动机参数的可变性,使其运转会经常受到干扰。所以,对于永磁电动机调速系统滑模控制的研究也越来越重要。本文引入SVPWM技术和闭环控制方法设计了永磁同步电机滑模控制器,并通过串口与上位机通信,形成了多机系统结构。通过设计电流环和速度环双闭环控制系统,利用MATLAB建立了永磁同步电机的软件仿真模型,并在给定的仿真参数下完成了电机的位置和速度控制。等设计了基于TMS320F2812的PMSM交流伺服系统,经过后期的仿真实验证明,该系统的软硬件系统运行良好。
在上世纪六十年代初期,苏联学者提出了滑模变结构控制,这种结构装置与传统控制器的区别在于控制的不连续性,加上其非线性的控制方法,使其在实施控制的过程中,能够被系统更改结构特性,从而实施切换动作。此外,该种滑模控制结构与控制对象的参数和干扰联系不大,使得滑模变结构控制环节减少,相应速度更快,并且,参数变化影响较小,可以不用在线识别。同时,由于其鲁棒性能较好,能够使控制算法简单化,所以,在其工作过程中,为复杂的工业控制问题提供简单的解决方法,因此,非常的适用于永磁同步电机调速系统中滑模控制系统的设计。
1 永磁同步电机的数学模型
与传统的电动机数学模型相比,永磁同步电动机的数学模型具有无可比拟的优越性,其模型简便,易于求解,在实际的建模过程中,根据实际数据情况,提出相应的建模假设:假设磁路是线性的;假设字气隙中,永磁体磁场为正弦分布;核心涡流和磁滞损耗不计算在内,其方程为:
(1)
对于表面式PMSM有,所以有转矩方程:
(2)
机械运动方程:
(3)
式中:指的是,电压;
指的是,电流;
指的是,电感;
r指的是,电阻;
P指的是,极对数;
指的是,磁链;
指的是,电磁转矩;
指的是,负载转矩;
J指的是,转动惯量;
指的是,转子电角速度。
2 滑模控制器设计
2.1 趋近律滑模
滑模变结构控制过程包括两个阶段:正常运动和滑动模式。一般滑动模式控制仅考虑接近滑动表面并满足稳定性条件的能力,但稳定性条件不反映运动的方式。接近的法则可以更好地保证正常运动阶段的质量。当远离开关表面移动时,适当的接近法可以将移动点设计到开关表面,以加速系统的动态响应。
(4)
式中,、k都是大于零的常数。式(4)中令s>0有
(5)
解微分方程得:
(6)
当s>0,s(t)=0时有:
由此可以求得:
(7)
由上式可以看出,参数K能够在有限的时间内,通过参数大小的变动,影响达到滑动表面的时间。增加K值,其相应速度随之变快,但是,K值过大,也会产生负面作用,导致滑面速度过大。所以,在实践中,应考虑K值的变化,将其与实际状态相结合进行调整。
2.2 控制量的求取
取PMSM系统的状态变量为
(8)
式中—给定;
—实际转速。
令A,可得系统的状态空间:
(9)
设计系统的滑模面S为:
(10)
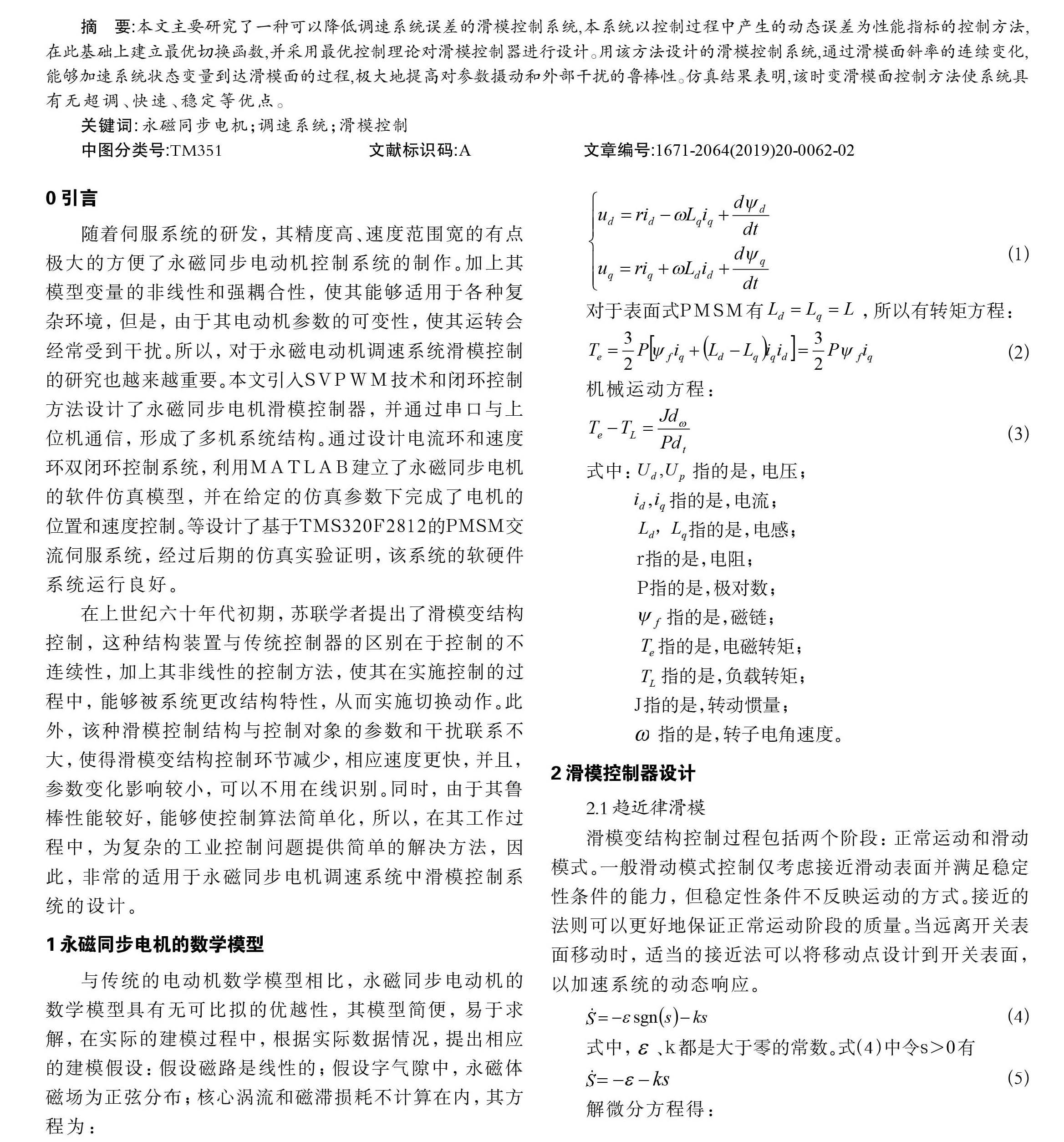
根据公式(5),可以自由选择指数趋近律,从而控制S形式趋近律法中的控制变量,然后生成下列方程:
(11)
如图1所示,根据控制变量的结构流程图,加上DSP编程,能够简化方程的求解步骤,提高方程的求解正确率。
当Lyapunov函数为V=时,要想使滑模控制的系统稳定,必须需满足下面条件:
(12)
保持系统稳定运行的条件是,、k>0,s与为异号。
3 实验研究
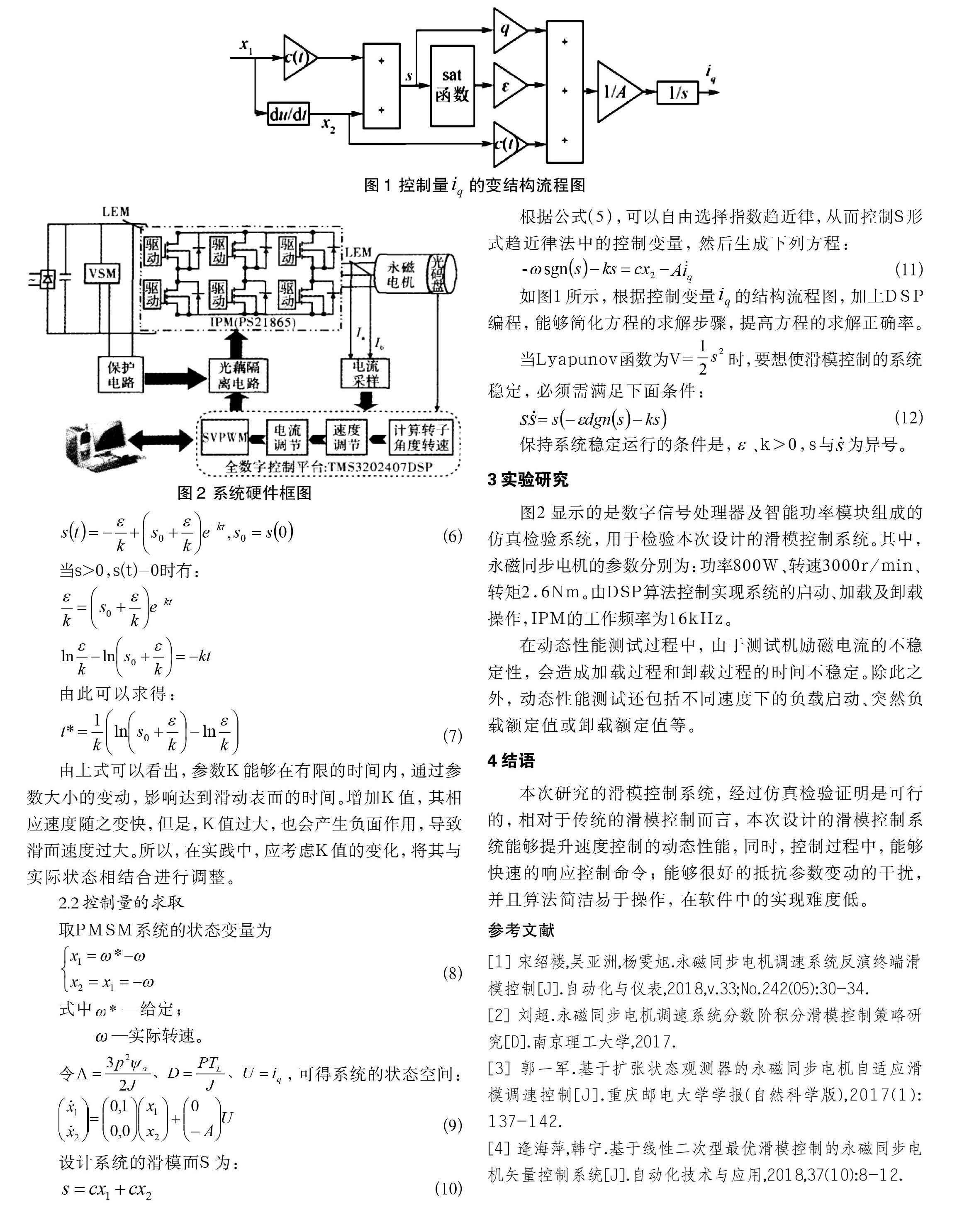
图2显示的是数字信号处理器及智能功率模块组成的仿真检验系统,用于检验本次设计的滑模控制系统。其中,永磁同步电机的参数分别为:功率800W、转速3000r/min、转矩2.6Nm。由DSP算法控制实现系统的启动、加载及卸载操作,IPM的工作频率为16kHz。
在动态性能测试过程中,由于测试机励磁电流的不稳定性,会造成加载过程和卸载过程的时间不稳定。除此之外,动态性能测试还包括不同速度下的负载启动、突然负载额定值或卸载额定值等。
4 结语
本次研究的滑模控制系统,经过仿真检验证明是可行的,相对于传统的滑模控制而言,本次设计的滑模控制系统能够提升速度控制的动态性能,同时,控制过程中,能够快速的响应控制命令;能够很好的抵抗参数变动的干扰,并且算法简洁易于操作,在软件中的实现难度低。
参考文献
[1] 宋绍楼,吴亚洲,杨雯旭.永磁同步电机调速系统反演终端滑模控制[J].自动化与仪表,2018,v.33;No.242(05):30-34.
[2] 刘超.永磁同步电机调速系统分数阶积分滑模控制策略研究[D].南京理工大学,2017.
[3] 郭一军.基于扩张状态观测器的永磁同步电机自适应滑模调速控制[J].重庆邮电大学学报(自然科學版),2017(1):137-142.
[4] 逄海萍,韩宁.基于线性二次型最优滑模控制的永磁同步电机矢量控制系统[J].自动化技术与应用,2018,37(10):8-12.
猜你喜欢
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
现代电子技术(2015年1期)2015-04-13
