
高速运动目标深海落点测量精度仿真分析*
2019-12-10 05:54张志伟
指挥控制与仿真 2019年6期
张志伟,孙 翱,张 旭,辛 健
(1.中国人民解放军91550部队43分队,辽宁 大连 116023;2.中国人民解放军92493部队博士后科研工作站,辽宁 大连 116023)
随着我国海洋研究和海洋探测从近海浅水区域向远洋深水区域拓展,对高速运动目标深海落点高精度定位测量需求日益凸显。由于海水对光波和无线电波的强烈吸收特性,无法满足水下目标探测、导航和定位需求。相比之下,声波在水中的传播性能要好得多,因此声波成为水下探测、识别与信息传递的主要手段[1]。利用目标入水声对落点进行定位属于水下无源定位问题,若已知水声信道和水听器阵的接收信息,就可推算声源信息[2]。常用方法包括多基站交会定位、目标运动分析方法(TMA)和匹配场处理技术(MFP)等[3-4]。利用多个基站进行交会测量,通常采用纯方位(bearings-only,BO)交会定位、时间定位(time of arrival,TOA)或时延差(time difference of arrival,TDOA)定位[5-6]。随着深海测量范围的增加,方位交会因误差随距离增大较快变得不适用;TOA方式对时间同步要求较高,需声源与阵元之间严格的时间同步,在无源定位中是不可行的[7],而TDOA主要是通过测量待测声源与各阵元之间的到达时间差而实现定位,仅需要各阵元之间的时间同步,在海面声目标有显著识别特征条件下可通过广义互相关等方法获得较高的时延估计精度,特别对于实时声信号有较快、较强的处理能力[8-10]。因此,基于TDOA体制多站时差定位方法更加适用于深海大区域入水目标落点测量。
目前,关于基阵构型与定位精度关系等问题研究较多[11-17],但对于TDOA体制下深海目标落点位置变化、参考基站选取等对落点定位精度影响规律缺乏一定认识。高速运动目标深海落点测量中涉及到的误差源主要包括站址误差、时延误差、声速误差、水深误差等,虽然通过某些技术手段可以将上述误差降到最低,但是测量误差始终存在。此外,基站布设方式、目标落点位置及参考基站选取等变化对落点测量精度也存在一定影响。
针对上述问题,本文拟在各种测量误差源综合影响下,通过分析基站布设方式、目标落点位置、参考基站选取等变化对落点位置测量精度影响规律,以期为高速运动目标深海落点测量系统设计及相关领域的工程应用提供理论支撑。
1 无源定位测量模型建立
基于TDOA体制的多站时差定位方法本质上是利用一组双曲线交会的方法确定声源位置,即利用每一组时延差测量值确定一条双曲线,最后由多组双曲线相交确定待测声源位置。图1为基于TDOA体制的无源定位示意图,其中黑色圆点为多个接收基阵,红色三角形符号表示双曲交会得到的声源位置。

图1 基于TDOA体制的无源定位示意图
假设在高速运动目标落点海域一定范围内布设n(n≥3)个基站,且位置坐标Xi已知,Xi=(xi,yi,zi)T(i=1,2,…,n),待测目标位置设为X=(x,y,z)T,Ti为待测目标到达各阵元的时间测量值,待测目标至各基站距离为

(1)
设在T0时刻,待测目标发出声信号,平均声速为Cm,到达各基站时间测量值可由以下公式求得

(2)
将式(1)进行线性化处理,即在待测点附近选取某一初始位置X0=(x0,y0,z0)T进行泰勒级数展开,忽略二阶及以上分量,只保留前两项,利用该值模拟高斯-马尔柯夫定理,有

(3)
将式(3)代入式(2),可得

(4)


(5)
上式可进一步改写成如下形式
ΔT=BΔX
(6)
其中,

(7)
B=

(8)
由最小二乘原理可得[18]
ΔX=(BTB)-1BTΔT
(9)
(10)

2 蒙特卡洛数值仿真过程







3 落点测量精度仿真分析
以目标落点测量区域中心为原点,建立站心直角坐标系,Y轴指向真北,X轴指向东,Z轴垂直于OXY平面向上为正,与X轴、Y轴构成右手坐标系,测量区域范围为20 km×20 km。将误差源参数设置如下:基站站址误差为20 m,水深测量误差为1.0 m,声速测量误差为2 m/s,时延误差设为200 ms,基站守时误差通常小于1 μs,相对于时延估计误差可忽略。
3.1 基站布设方式对定位精度影响
参考基站选择[10 000 m, 3 000 m,-10 000 m],基站个数选择3~8时,观察落点定位精度随基站数变化规律。图2为基站布设示意图,表1为选择不同基站数时部分坐标点定位精度变化情况。
通过分析表1中数据可得如下结论:
1)随着基站个数的增加,总体定位精度得到了提高。3基站时定位精度较差,且X方向定位精度要明显低于Y方向定位精度,4基站以上定位精度提高幅度不大;
2)当基站布局完全对称时,如图1中的4基站和8基站,各坐标点X方向和Y方向定位精度相当;
3)从5基站到6基站,Y方向定位精度基本保持不变,X方向双曲交会性能提高,故X方向精度提高明显;从7基站到8基站,X方向定位精度基本保持不变,Y方向双曲交会性能提高,故Y方向精度提高明显。5基站是在4基站的基础上,通过在X方向增加了一个基站,由于在X方向上双曲线得到拉伸,交会性能下降,故Y方向精度要优于X方向;同理7基站中,由于Y方向上双曲线得到拉伸,故X方向精度要优于Y方向。

图2 基站布设示意图

表1 选择不同基站个数时目标点的定位精度
3.2 目标落点位置对定位精度影响
当四个基站A、B、C、D位置确定后,在定位解算过程中,选择A点为参考基站,各误差源参数设置保持不变。当待测目标位于测量区域不同位置时,如图3所示,按照沿X轴方向、沿Y轴方向及沿两个对角线方向分别考察定位精度的变化情况。表2为待测目标沿坐标轴及对角线方向分布时定位精度变化情况。

图3 待测目标位置分布
通过分析表2中数据可得到如下结论:
1)沿X轴方向分布的坐标点定位误差与沿Y轴方向分布的坐标点定位误差关于对角线Ⅱ对称;沿坐标轴及对角线方向分布的坐标点定位总误差先减小后增大,在坐标(0,0)处精度最高;
2)沿直线Y=0,X方向误差先减小后增大,Y方向误差在靠近基线AD方向误差较小,如图2中的4、5两点。由于沿X方向及Y方向各坐标点定位误差关于对角线Ⅱ对称,故沿直线X=0,Y方向误差先减小后增大,X方向误差在靠近基线AC方向误差较小;
3)沿对角线Ⅱ方向上各坐标点X和Y方向定位精度相当,对角线Ⅰ的点定位误差关于对角线Ⅱ对称。
上述分析仅仅针对沿测量区域四个方向坐标点的误差分布规律,并不能代表整个测量区域的误差分布规律,因而必须从整个测量区域来分析不同落点误差分布规律。
3.3 参考基站选取对定位精度影响
在建立TDOA体制定位模型过程中,需要获取各基站至参考基站的到达时延差,因此建模过程涉及到参考基站选取问题。当选取的参考基站变化时,为便于观察区域内落点处于不同位置定位精度变化规律,可将测量区域进行网格化处理,具体方法如下:
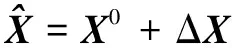
选取横坐标范围[-8 000 m,8 000 m]、纵坐标范围[-8 000 m,8 000 m]的区域,按1 000 m×1 000 m间距将测量区域进行网格化处理,将该区域划分为289个坐标点。当落点处于不同位置时,区域内各坐标点X方向、Y方向及总位置误差分布情况如图4~图7所示,表3为部分坐标点定位误差精度统计情况。
由图4~7结合表3可知,当选择不同参考基站且目标落点处于不同位置时,落点的X方向、Y方向及总位置误差分布存在如下规律:
1)由于基站布设存在对称性,定位误差分布也存在明显对称性。当选择某一参考基站并得到该区域落点测量误差分布规律,根据误差分布的对称性,很容易得到选择其他参考基站时误差分布规律。上述分析说明了定位模型能够对参考基站选取及目标落点位置变化产生合理响应,进一步验证了模型的准确性;

表2 沿坐标轴及对角线方向分布时目标点的定位精度
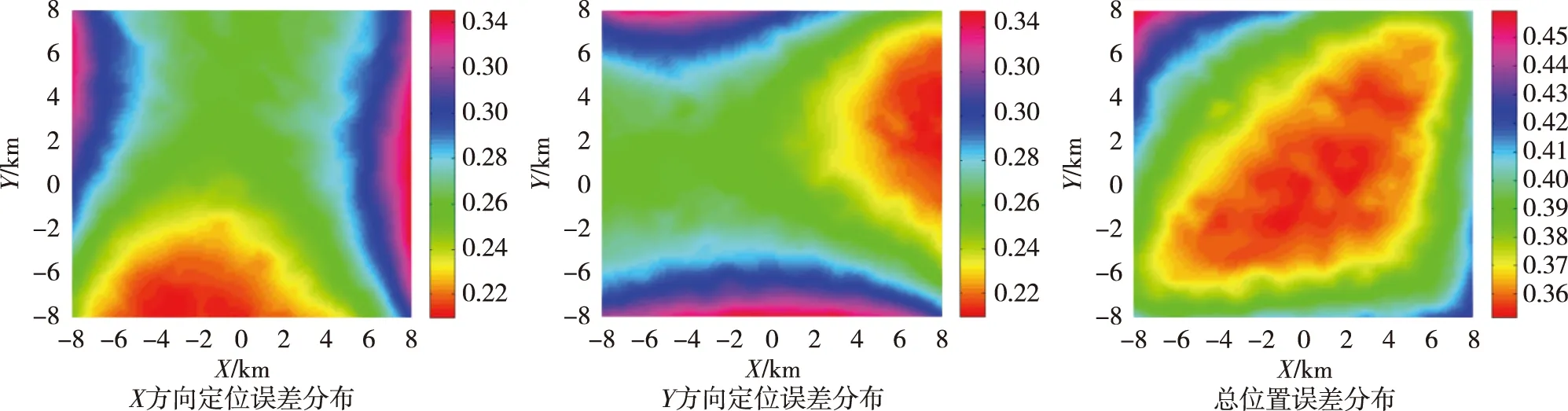
图4 参考基站选择A点时定位误差变化情况

图5 参考基站选择B点时定位误差变化情况
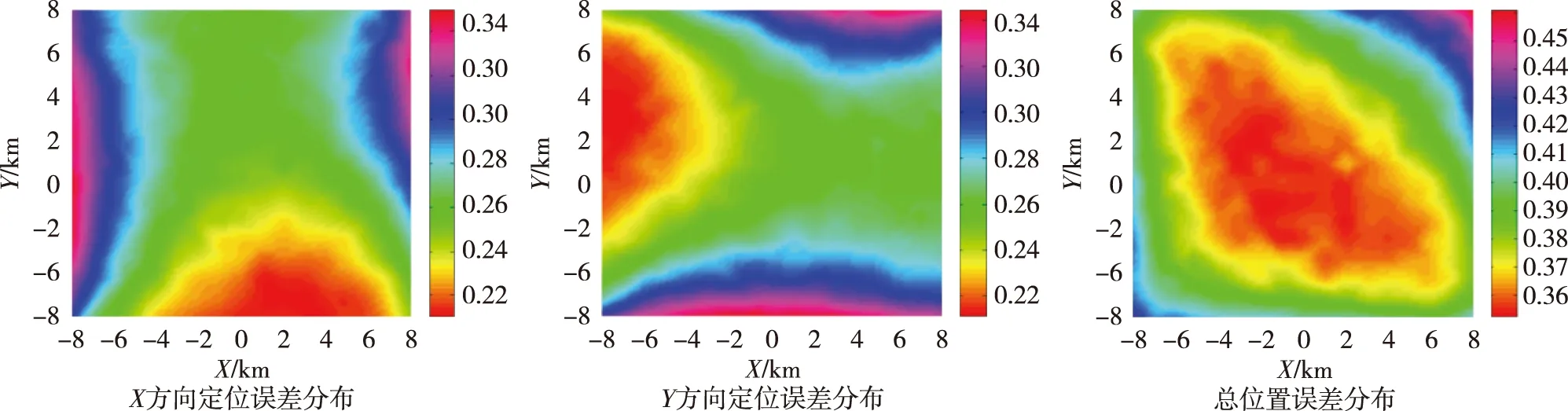
图6 参考基站选择C点时定位误差变化情况
2)当目标落点位于测量区域中心附近时,参考基站选取对定位精度造成的影响很小,例如坐标(0 m,0 m),不同参考基站造成的定位误差趋于一致,可忽略其影响。区域内各坐标点总位置误差分布精度较高区域为图中呈近似等腰三角形部分,三角形的顶角指向参考基站方向,三角形的两底角指向对角线方向。若落点位于测量区域边缘对角线附近时,参考基站选取对定位精度影响明显,例如坐标(8 km,8 km),不同参考基站造成X方向最大误差值相差82.2 m,Y方向最大误差值相差80.4 m,总位置误差最大相差80.4 m,总位置误差最大相差达到56.2 m,不可忽略其影响。
4 结束语
基于TDOA的多站时差定位体制作为一种有效方法被广泛用于水下无源定位测量,而其定位测量精度则受多种复杂因素影响。为了深入分析高速运动目标深海落点测量精度,本文首先建立了基于TDOA体制定位测量模型,给出了蒙特卡洛数值仿真过程,然后在测量误差源综合影响下,分析了基站布设方式、目标落点位置、参考基站选取对定位测量的影响。通过研究落点定位误差影响规律,对高速运动目标深海落点位置测量基站布设、误差控制、精度评定及相关工程应用具有一定指导意义。
在深海落点测量模型建立过程中,将声速视为常数,但深海中待测目标至基站距离较远时,声波在深海声场沿会聚区声信道传播过程中声线路径弯曲效应明显,若仍将声速视为常量,则对定位精度会产生一定影响,下一步将改进和完善定位模型,建立变声速条件下测量定位模型,同时深入分析声速环境起伏对定位测量精度的影响。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
导航定位学报(2021年4期)2021-08-29
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
太空探索(2016年12期)2016-07-18
中学生数理化·八年级数学人教版(2016年2期)2016-04-13
中学生数理化·八年级数学人教版(2016年3期)2016-04-13
小雪花·成长指南(2015年7期)2015-08-11
小天使·五年级语数英综合(2014年12期)2015-01-14
