
一种近程简易制导火箭方案设计和仿真
2019-12-03 02:07张敬敏章浩飞刘佳兴
兵器装备工程学报 2019年11期
张敬敏,章浩飞,刘佳兴
(1.西北工业大学 航天学院, 西安 710072; 2.中国兵器工业第二〇八研究所,北京 102202)
进入21世纪,日益恶劣复杂的战场环境要求利用新技术、发展新武器以顺利完成作战任务、达到战术战役目的,尤其是现代电子技术、自动控制技术、数字信息技术和微光机电技术的迅猛发展,使得对重点目标实施精确打击成为现实。相比精确制导弹药,简易末端修正弹药结构相对简单、成本低、技术较易实现、适合部队大量装备,与常规弹药相比,能大幅减小落点散布,提高射击精度,减少弹药的消耗,因此成为各国弹药发展的一个热点[1]。
目前,实现末端制导与修正的执行机构主要有阻尼器、空气动力鸭舵和脉冲推力器[2]。文献[3]中提出一种利用阻尼器的纵向弹道修正自适应落点控制算法,对于静态目标具有较好的打击精度,但是无法进行侧向的弹道修正。文献[4]中设计一种利用鸭舵执行机构的二维弹道修正方法,具有连续提供控制力、大气层内修正精度高的优点,但是其机构复杂、成本较高,大气层外控制效率有限。文献[5-8]中对利用脉冲推力器进行弹道修正的方法进行了研究,分析了影响脉冲修正能力的因素,通过仿真对点火控制方法和修正算法进行了优化,以上文献重点在于理论方法的研究,对于制导控制装置的系统组成、工作原理和具体实现介绍不足。本研究以单兵近程简易修正火箭为研究对象,对制导模块的组成、原理、控制方法等要点进行了较为详细的研究和仿真分析,并采用易购电子元件、光学器件和执行机构建了样机,进行了试验验证,取得了预期效果。
1 简易制导模块的组成与原理
通用制导模块由捷联导引头、传感器、信号处理电路、电源和执行机构等组成,配套装备包括目标激光指示器、测距观瞄火控系统等,如图1所示。

图1 通用制导模块结构组成
简易制导导引头采用捷联激光半主动制导方式。执行机构可采用环状布置的微脉冲推力器结构。射手发现目标后,发射制导火箭,同时使用激光照射器照射目标,此时的激光照射器发出的激光是按一定规律向空间发射经编码调制的激光束,且光束中心线对准目标。在弹道末段,目标漫反射的激光进入导引头视场,导引头的光学系统将激光聚焦在四象限光电探测器上[9],四象限光电探测器将光的偏转信号转成电信号,信息处理器对此电信号进行程序处理,解算装置计算出弹体偏离中心线的大小和方向,形成控制信号,向脉冲推力器发出指令,控制恰当位置的脉冲推力器作用,修正制导火箭弹道,直至命中目标。
导引头探测原理如图2所示。弹丸以转速ω(变值)旋转飞行,通过脉冲推力器实施末段弹道修正。XYZ为固定的基准弹道坐标系,X表示弹道射程,Y表示弹道高低,Z表示弹道方向。目标漫反射激光进入导引头视场后,导引头的光学系统将激光聚焦在光电探测器上,光电探测器输出对应位置的电压电流信号,导引头的光电信息处理电路会对接收到的电流电压信号进行处理,向制导模块的信号处理器发送两个值δ和α,δ是导引头光轴相对于弹与目标连线的夹角,α是弹轴旋转坐标系中弹丸与目标连线在弹横断面投影线与Y轴线夹角。
图2 导引头探测原理简图
信息处理器根据重力传感器确定的地球重力方向和δ、α角,可以计算出弹丸在垂直方向偏离弹道的数值和其在水平方向偏离弹道的数值。信号处理器预装订的制导控制算法据此可以进一步确定弹丸当前弹道是否需要修正,以及应该进行方向修正或是进行高低修正。在需要进行弹道修正时,信号处理器确定出恰当位置的脉冲推力器,向其发送点火指令,脉冲推力器喷射火药气体的反作用力推动弹丸改变弹道,将弹道修正至理想位置,直至命中目标,简易激光制导原理示意图如图3。

图3 简易激光制导原理示意图
2 简易控制系统
2.1 脉冲推力器配置方案
近程简易修正火箭配置有一组推力器,每组共有12个微型脉冲推力器呈环状排布,由这些推力器来提供修正火箭弹道偏差所需的控制力和力矩,在实际的工作过程中,这些微型脉冲推力器按照时序分步进行点火,从而使得单兵火箭的工作时间加长、控制精度提高、落点散布减小[10]。各微型脉冲推力器和修正火箭质心之间的距离为li,所有微型脉冲推力器在火箭弹体上的位置都是固定不变的,所有脉冲推力器同时工作时提供的合力为Fp,与准弹体坐标系下oz4轴之间的夹角为σ。
2.2 控制方案设计
将脉冲力投影到准弹体坐标系(ox4y4z4)内,可以得到准弹体系下的脉冲力和绕质心的力矩表达式为
(1)
(2)
通过坐标变换,将此脉冲力投影到弹道坐标系下的结果为:
(3)
由于初始扰动的存在,修正火箭在实际飞行过程中的弹道与理论弹道是会有偏差量的。假设在飞行过程中,某个时刻t时单兵火箭质心相对地面坐标系下的位置为,在单兵火箭期望的理论弹道中该时刻的位置是(xc,yc,zc),两者作差,可以得到地面坐标系下的偏差值为
(4)
再将求得的地面坐标系下的弹道偏差值转换到弹体坐标系中,记转换矩阵为A(ψ,ϑ,γ),计算得到弹体坐标系下的偏差量为
(5)
控制系统通过弹道偏差变化信息反馈来实时获取火箭弹的姿态信息,通过处理电路进行结算,实时在线修正弹道,即可达到精确控制的效果。
点火方案采用间隔组件同时点火的控制方案,从而使得控制系统的精度更高,当弹道的偏差值大于给定阈值时,距离弹道偏差方向最近的微型脉冲推力器同时点火,随着弹丸的不断旋转,这时原本靠近偏差方向的微型脉冲推力器开始远离偏差方向并停止工作,新的靠近偏差方向的组件开始工作。每个推力器的工作时间为τ。
脉冲力的作用时间很短,随着弹丸的不断旋转,喷管组件随弹丸转过的角度也会增大,使得脉冲力在指定方向的合力分量将会减小,脉冲力的利用效率就会受到影响。
2.3 控制力及力矩模型
加入脉冲力的简易修正火箭弹质心运动的动力学方程为
(6)
其中:Fx2、Fy2、Fz2为除推力外所有外力(总空气动力R,重力G等)分别在弹道坐标系ox2y2z2各轴分量的代数和;Px2、Py2、Pz2分别为推力P在弹道坐标系ox2y2z2各轴上的分量。Fpx2、Fpy2、Fpz2分别为脉冲修正力在ox2y2z2各轴上的分量。
加入脉冲修正力矩的简易修正火箭弹绕质心转动的动力学方程为

(7)
其中:Mx4、My4、Mz4分别为火箭弹受到的除脉冲力矩之外的所有力矩在准弹体坐标系各坐标轴上的分量;Mpx4、Mpy4、Mpz4分别为脉冲控制力矩在准弹体坐标系各坐标轴上的分量。
3 弹道仿真分析
简易制导模块可以用于多种制导弹药上,下面以近程修正火箭为基础,分析简易制导模块对近程火箭命中精度的影响。通过研究分析发现,导引头解耦和控制策略和推力器总冲是影响弹道修正能力和精度主要因素,关于导引头解耦已有大量文献进行详细研究,不再赘述,本文仿真重点分析控制策略和和推力器总冲对精度的影响。首先仿真分析无控火箭初速和射角对命中精度影响。
3.1 无控火箭弹道分析
无控条件下,选取发射初速V0=160 m/s、纵向发射角θ0=9.6°、侧向发射角ψv0=0°为标准条件,进行无控弹道仿真。在仿真过程中,分别加入ΔV0=±4 m/s的初速误差、Δθ0=±1°的纵向发射角误差和Δψv0=1°侧向发射角误差与标准情况进行比较。3种情况下的无控仿真弹道如图4~图6所示。
由图4~图6可知,在无控情况下,ΔV0=4 m/s、Δθ0=1°和Δψv0=1°时弹道落点与标准条件(V0=160 m/s、θ0=9.6°和Δψv0=0°)弹道落点之间的偏差(X方向)分别为21.6 m、39.4 m和10.55 m,表明发射初速和射角对命中精度的影响较大,为了提高命中精度,需采用简易制导控制系统进行弹道修正。

图4 同纵向、侧向发射角,不同发射初速误差无控弹道
图5 同初速、同侧向发射角,不同纵向发射角误差无控弹道
图6 同初速、同纵向发射角,不同侧向发射角误差无控弹道
3.2 采用简易修正后的火箭弹道分析
对采用了简易制导技术后的近程末修火箭系统进行仿真分析。选取目标射程为600 m,其余仿真条件与无控弹道仿真标准条件相同,全程火箭弹飞行时间约5.1 s。
为了验证简易制导控制系统的起控时间和脉冲推力器总冲对弹道修正能力的影响。首先固定单发总冲Pimp=16 N·s,选取起控时间tc分别为2.3 s、2.8 s、3.3 s、3.8 s、4.3 s、4.8 s进行仿真,仿真弹道如图7所示。

图7 不同起控时间的有控弹道
由表1中脱靶量R来看,起控太早或太晚都对命中精度会产生不利影响,具体时间需要根据弹体参数与弹道相匹配来确定,本方案中匹配后最佳起控时间为3.8 s。

表1 起控时间与立靶精度的关系
固定起控时间tc=3.8 s,单发总冲Pimp分别为4 N·s、8 N·s、16 N·s、32 N·s、64 N·s,仿真弹道如图8所示。
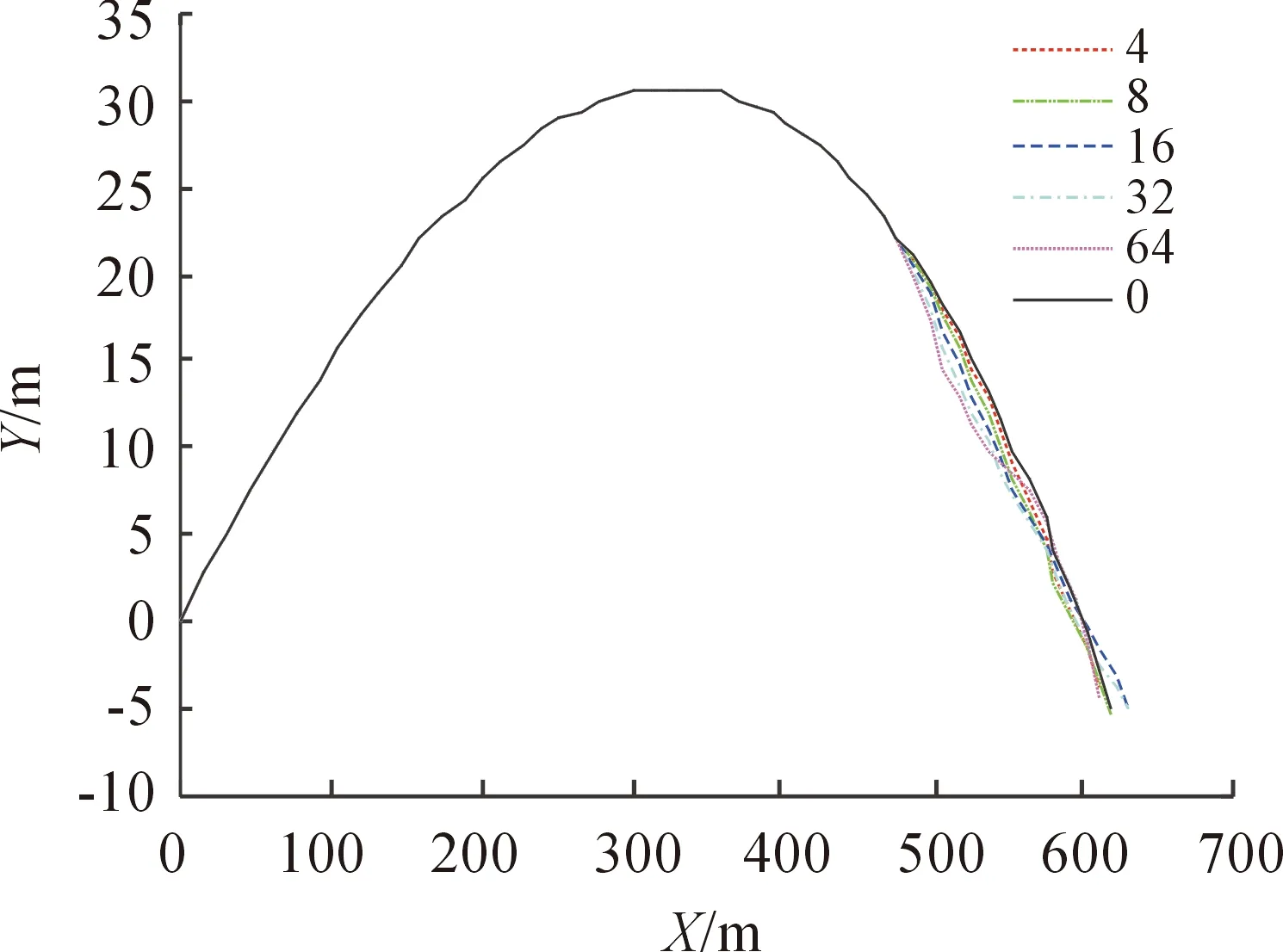
图8 不同推力器总冲的有控弹道
由表2可知,对于相同的起控时间,推力器总冲的不同对命中精度和最大修正能力影响很大。随着推力器总冲的提高,火箭弹的最大修正能力逐渐增强;但火箭弹的立靶精度(R)并不会随推力器总冲的增加而减小,而是存在一个理想区间,可以通过权衡最大修正能力和修正精度进行选择。以脱靶量R作为考核标准,本方案中最佳总冲为16 N·s。
从表1、表2来看,采用通用制导模块进行修正后,弹丸的末端精度相较无控弹精度得到了大幅提升。但是,在采用该项技术时需要综合考虑最大修正量和立靶命中精度之间的匹配关系,根据计算结果,文中选取起控时间3.8 s和单个总冲16 N·s作为最佳匹配值,进行了50次蒙特卡洛打靶试验。

表2 脉冲推力器总冲与立靶精度和最大修正能力的关系
图9为近程末修火箭在初速、射角以及导引头测量误差、推力器输出误差等干扰因素存在的情况下的蒙特卡洛打靶结果。从其中可以看出,经过简易制导模块修正后火箭弹的最终脱靶量小于1.2 m,精度效果较好。

图9 蒙特卡洛打靶结果
另外,通过简易制导飞行试验对仿真结果进行了验证,试验结果与仿真结果一致。图10为火箭弹飞行过程中末修段推力器的工作状态。

图10 单兵末修火箭试验
4 结论
在制导控制方案确定的情况下,合理匹配简易制导火箭的起控时间、脉冲推力器总冲等关键参数,完全能够满足末修火箭弹对命中精度和最大修正能力的要求。在仿真条件下,发射初速误差不大于4 m/s、纵侧向发射角误差分别小于1°范围内时,最终脱靶量小于1.2 m,显著提高近程火箭弹的命中精度,具有良好的工程应用前景。
猜你喜欢
空间控制技术与应用(2021年4期)2021-08-02
空间控制技术与应用(2021年1期)2021-04-25
军民两用技术与产品(2021年10期)2021-03-16
中国空间科学技术(2020年4期)2020-12-01
空天防御(2019年3期)2019-08-23
航空兵器(2018年1期)2018-04-09
软件导刊(2015年8期)2015-09-18
