基于神经网络的接触悬挂装置多目标定位算法研究
2019-12-02 05:35董建明
工程建设与设计 2019年22期
董建明
(北京市轨道交通运营管理有限公司,北京100000)
1 引言
随着我国高速铁路事业的快速发展,为满足其运营品质需求,对弓网系统的安全运行提出了更高的要求。其中,接触线通过一些悬挂支撑装置实现与受电弓接触,来达到为列车提供电能的目的。接触网悬挂装置一旦出现该情况,会影响受流质量,严重情况下甚至会造成交通事故。因此,有必要对接触网的支持与悬挂装置进行状态检测,这对于列车的安全运营具有十分重要的意义[1]。
采用非接触式检测技术对接触网的支持与悬挂装置进行检测,首要的环节需要对各子部件进行准确的定位。目前,采用传统的图像处理技术对其进行检测的研究较多,如文献[2]结合光射特点和模板匹配技术,完成对绝缘子支撑装置的定位。通过模板匹配实现对于旋转双耳的定位,进而来分析耳断裂故障。文献[3]将提取的HOG 特征经支持向量机,来判定候选区域是否包含线夹部分。但这些方法主要对某一单一部件进行定位检测,且定位算法的准确率较低,此外,这些算法步骤冗余,算法的运行效率较低。而随着深度学习的出现,具有高效率、普适性和可塑性强等特点的方法出现,可有效解决上述不足。
本文介绍了一种基于Faster R-CNN 模型的接触网悬挂装置多目标定位方法。首先,分别采用卷积神经网络完成对于候选框的确定和各部件特征图谱的获取,然后,利用Softmax完成各部件识别定位,完成Faster R-CNN 模型的构建。最后将训练集和测试集输入Faster R-CNN 模型完成定位模型的训练和测试。
2 基于Fas t er R-CNN的接触网支撑与悬挂装置多目标定位
2.1 Fas t er R-CNN
Ross Girshick 团队在R-CNN 和Fast R-CNN 的基础上进行优化提出了Faster R-CNN 算[4],基于R-CNN,其将候选框映射值CNN 提取特征的特征图上,进而避免重复计算,同时,采用CNN 替代SVM 来实现分类的作用[5]。并且,Faster R-CNN将候选框提取由区域建议网络(RPN)完成,RPN 采用卷积核为3×3 的卷积层在特征图上滑窗操作,来确定候选框的位置。Faster R-CNN 整个计算步骤如图1 所示。
2.2 定位原理
采用基于Faster R-CNN 模型对接触网支撑和悬挂部件进行定位。首先,将待检测图像输入CNN 网络获得特征图谱,并输入至RPN 网络,将获取的备选区域连接至ROI 池化层,并将获取的特征图谱输入全连接层。最后采用多任务分类器实现特征分类和边界框的定位。

图1 计算步骤
2.3 训练策略的确定
Faster R-CNN 算法需要训练两种不同任务的训练模型。
交替训练首先训练RPN 网络,然后将训练好的参数作为Fast R-CNN 的初始参数,并将RPN 的输出作为Fast R-CNN的输入,通过不断迭代来训练网络。
不同交替训练模式,近似联合训练模式,将RPN 和Faster R-CNN 融合于一个网络。由于每次随机梯度下降迭代时,前向传播时,RPN 产生的proposal 是固定的,可提前计算,来训练Faster R-CNN 网络。
近似联合训练模式使用内存较少,会缩短训练时间,本文采用近似联合训练模式来对定位模型进行训练。
3 实验和分析
3.1 定位目标
根据接触网缺陷的故障率和部件的重要度,本文定位了6个部件,分别为承力索支座、定位器支座、套管双耳、绝缘子、斜/平腕壁底座和线夹。
3.2 样本来源和预处理
本文采用某铁路线段4C 高清图像作为训练样本,共计1500 张,同时将3 条线路采集各150 张图片作为测试样本。基于此,首先利用LabelImg 软件对图像的6 个区域做定位框标注处理。
3.3 结果分析
采用150 张测试集输入构建的定位模型,测试定位算法的结果,定位效果如图2 所示。
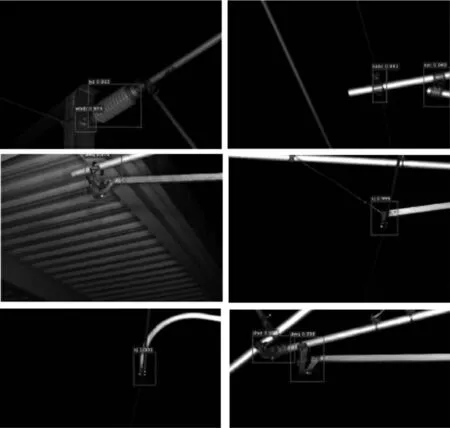
图2 定位结果
卷积层和池化层可视为一个特征提取网络,本文实现主流的VGGNet-16、ResNet-101、MobileNet 3 种特征提取网络,获得结果如表1 所示。
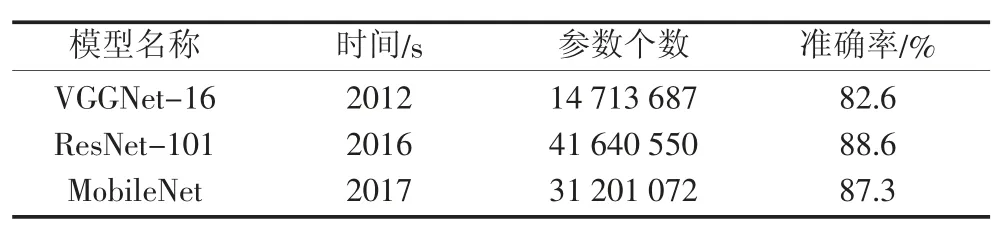
表1 不同特征模型下的定位结果
如表1 所示,由于ResNet-101 网络深度较高,为此,其准确率最高。MobileNet 由于采用了卷积分解思想,在准确率超过VGGNet-16 情况下,真个模型大小仅为ResNet-101 的1/12。综合考虑运行效率和准确率等因素,本文选取特征网络为MobileNet。
在特征网络选取MobileNet 后,将本文算法同应用广泛的YOLO、SSD 目标检测算法进行了对比,获得如表2 所示。
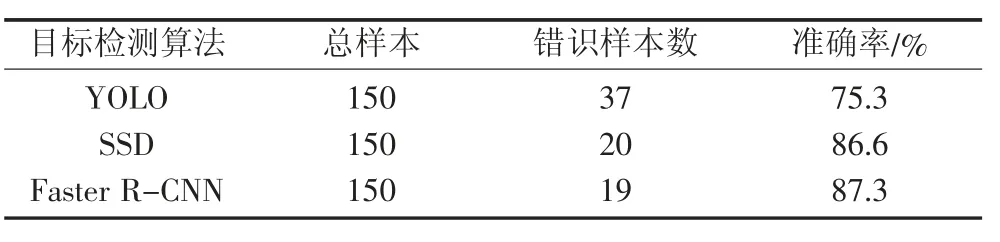
表2 不同检测算法下的定位结果
从表2 可以看出,本文采用的算法相比YOLO 有大幅度提升,相比SSD 算法,准确率也有略微的提升,体现了本文算法的优越性。
为验证本文算法的通用性,对京广线、杭长线、和京九线150 张标注样本进行了测试,将预测结果和标注结果对比,如表3 所示。
根据表3 所示,杭长线和京广线具有较好的检测准确性,而对于吐库线具有较差的检测准确性。原因在于杭长线和京广线地处内陆,吐库线地处边疆,由于防风要求不同,杭长线和京广线采用德式接触网结构,吐库线采用日式腕臂结构。由于其结构具有较大差距,造成吐库线的定位准确性较差。

表3 不同线路下定位结果
整体而言,采用京广线采集图像作为训练集情况下,杭长线具有较好的准确性,相比京广线定位结果,下降幅度不是很多。说明本文所介绍的定位检测算法具有良好的普适性。而吐库线由于采用日式刚腕臂结构,可单独训练一个使用日式刚腕臂结构定位识别模型,来实现其准确定位。
4 结论
本文介绍了一种基于Faster R-CNN 模型的接触网悬挂装置多目标定位方法。测试结果表明,相比YOLO 和SSD 目标检测算法,基于Faster R-CNN 模型的目标检测算法定位精度分别提高了12%和0.7%,具有较好的准确性和运行效率,同时,针对不同线路的采集图像进行测试,检测结果表明,不同线路下本文方法均能较好定位六大区域部件,具有较好的通用性。
猜你喜欢
云南画报(2021年10期)2021-11-24
装备制造技术(2020年4期)2020-12-25
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
制造技术与机床(2018年9期)2018-09-19
知识经济·中国直销(2018年3期)2018-04-12
海外华文教育(2017年6期)2017-08-07
西南交通大学学报(2016年3期)2016-06-15
现代工业经济和信息化(2016年4期)2016-05-17
铁路技术创新(2015年3期)2015-12-21