基于Make Block的全地形生命探测机器人验证模型设计
2019-11-30 12:35刘涵茜
科技创新导报 2019年19期
刘涵茜


摘 要:近几年自然灾害、恐怖活动和化工等突发性事件时有发生,它们都具有突发性、紧迫性和危害性。在地震、矿难和化工事故等事件发生时在第一时间掌握环境信息,对于营救被困人员具有重要意义。然而在灾害发生后现场变得十分复杂,救援人员对灾害现场无法做出全面的勘察。本设计利用Make Block 搭建了全地形生命探测机器人验证模型,该模型通过太阳能板和蓄电池进行供电,由红外线遥控器控制机器人的运动方向和速度,利用机器人前方摄像头和人体红外传感器帮助救援人员进行实时监控和探测周围是否存在生命体,机器人后方的超声波传感器帮助机器人躲避后方未知障碍。另外操作者可通过视频模块连接到电脑或手机终端来对机器人进行实时的监控。
关键词:Make Block 全地形生命探测机器人 验证模型
中图分类号:TP242 文献标识码:A 文章编号:1674-098X(2019)07(a)-0077-06
1 概述
从近几年来频繁发生的自然灾害和工厂设施发生的意外事故调查来看,灾后现场通常十分复杂,营救人员对灾害现场无法做出全面的勘察,容易使被困群众错过“黄金救援时间”,并且救援现场可能还会出现二次伤害。面对这种情况,本文设计了一款由Make Block 搭建的全地形生命探测机器人验证模型。该模型能在复杂环境中能灵活移,通过履带式结构能轻松跨越障碍;机器人前端配备了人体红外传感器和二氧化碳气体传感器对生命体进行检测;该机器人模型还装有无线摄像头且支持远距离监控,可以帮助营救人员在安全区域了解灾害现场的实际情况;机器人后端安装了超声波模块,可以有效躲避障碍物;此外考虑到灾害现场的恶劣环境无法提供充电,该机器人还搭载了一块太阳能电池板进行供电和储备电源。
2 系统方案设计
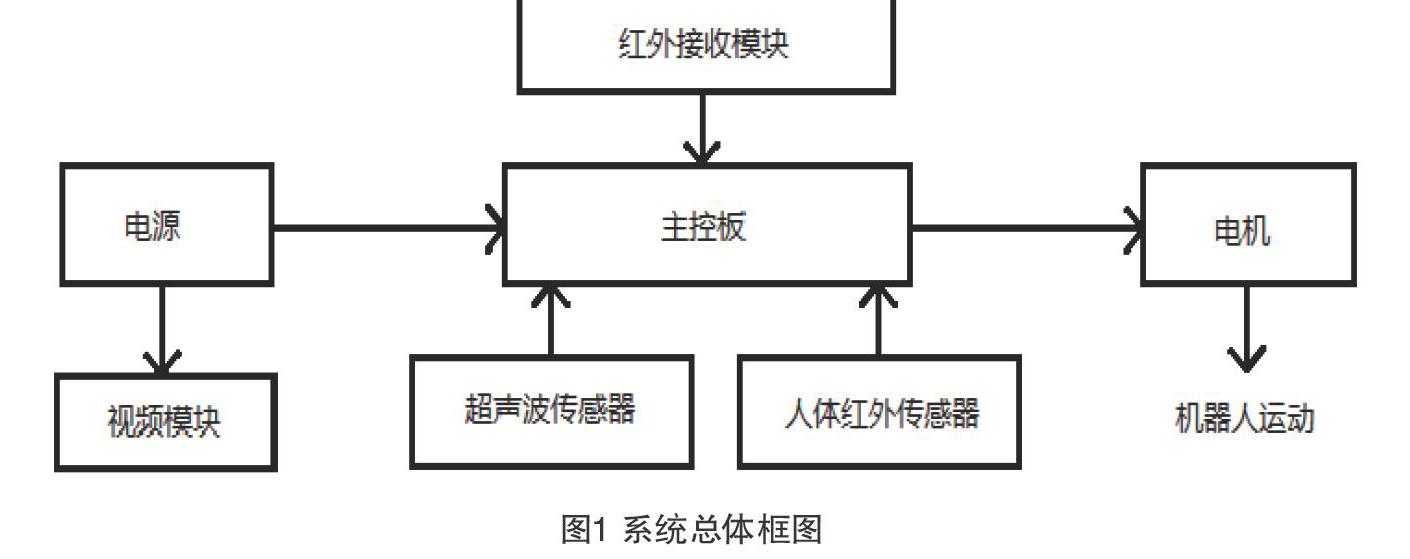
该机器人验证模型系统主要由Make Block主控板、太阳能板、蓄电池、无线摄像头、红外接收器、超声波传感器、人体红外传感器和电机组成,如图2所示。
首先由太阳能电池板将光子收集,由光子将太阳能电池板内的P型硅与N型硅将电子激发出来,再通过电路将电子输入进太阳能控制器,太阳能控制器即可以将电流输入进蓄电池为机器人存储足够的电能,也可以防止电流回流保护电路。当开关打开,电路线路接通,主控板可控制红外接收器、超声波传感器、人体红外传感器和无线摄像头。操控人员通过遥控器向红外接收器发送信号,接收器将信号传递到主控板,再由主控板控制电机的正转与反转。此外,当机器人后方的超声波传感器检测到障碍物时,发出信号至主控板,主控板控制电机将转速降至为零使机器人停止运动;而当人体红外传感器、二氧化碳传感器探测到有生命体也将发出信号至主控板,主控板立即发出报警信息。同时操作人员也可通过无线摄像头视频模块连接至手机或电脑终端勘探周围受灾环境。
3 系统硬件设计
3.1 Make Block Orion主控板
本设计选用的是Make Block Orion的主控板,其技术规格为输出电压5V DC,工作电压6V-12V DC,最大输入电流为3A,通讯模式为UART口,主控芯片为Atmega 328p:主控板3、6接口接超声波感应器,4接口接红外接受模块。VIN、GND接口分别接电池的正负极两端。M1、M2分别接电机两段。主要控制机器人的运动模块,实现机器人的运动、停止和加速,如图3所示。
3.2 太阳能控制器及太阳能板
本设计采用的太阳能控制器系统电压为12V,额定充电和放电电流为30A。在机器人线路连接中太阳能控制器以保护电路的形式将太阳能电池板、蓄电池和主控板通过电线连接的形式连接。其中太阳能控制器在机器人的总控制系统中起到保护电路的作用,即当电路中蓄电池电压高于或低于电路的保护电压时,控制器将自动关闭以保护蓄电池和其他用电器不受损坏,同时也防止蓄电池不会反向对太阳能电池板进行充电,对太阳能电池板造成损坏;在无线遥控侦探报警机器人长时间运行时对蓄电池的温度进行监控,对蓄电池的充放电压进行修正,使蓄电池在安全、理想的状态下工作运行。
太阳能电池板能输出的最大电压为12V,最大功率为1.5W,工作原理是將太阳的辐射能转化为电能,再通过导线将电能存储进蓄电池中,或在蓄电池欠压状态时直接带动机器人进行运动,如图4所示。
3.3 二氧化碳传感器
由于考虑到受困者被困于狭窄的空间内,空气较为浑浊,结合在气体浑浊状态下,二氧化碳的浓度测量值为2000~5000ppm,而人体在呼吸顺畅的状态下,二氧化碳的浓度值为1000~2000ppm。所以结合两组数据设置二氧化碳气体传感器浓度检测范围为1500~5000ppm。
3.4 超声波传感器
超声波传感器利用的是纵向震荡,其工作原理是根据气体、液体和固体之间不同介质中传播频率和反射时间对信号进行反馈,该类型超声波传感器的检测距离为5cm,使机器人在检测到后方障碍物时能及时停止运动以保护机器人的安全运行。
3.5 人体红外传感器
在此模块上有电位器,可以通过其来调节灵敏度。同时可以通过控制Mode引脚的电平来选择工作模式,当Mode引脚为高电平时,允许重复触发,即时感应。当Mode引脚为低电平时,为不可重复触发模式,当有人在量程内移动时,模块被触发并保持一段时间,期间有无人在量程内移动,状态都不会被干扰。
3.6 无线摄像头
该无线摄像头可通过蓝牙与手机获电脑相连接,方便现场营救人员在远程环境下进行探测及监视。
3.7 红外线模块接收模块与遥控器
最大接收距离为10m,默认波特率为9600,在本项目中的作用是控制机器人的基本运动,使机器人进行基本的前进倒退的动作和原地旋转。
4 系统软件部分设计
4.1 控制流程图
当操作者按下遥控器的前进按钮时,无线遥控侦探报警机器人的红外接收模块接受到前进信号后,机器人将高速前进;同理,当操作者按下后退按钮时,机器人将高速后退。当操作者按下遥控器中的左转按钮时,机器人左侧电机转速保持不变、右侧电机将增大转速,使机器人做出左转动作;而当操作者按下右转按钮时,机器人右侧电机转速保持不变,左侧电机将增大转速,使机器人做出右转动作。当机器人倒退时,超声波传感器探测到后方5cm处有障碍物时,机器人将自动停止运行以保护机器人的安全运行。当机器人前方设置的人体红外探测模块探测到前方有生命体时,机器人主控板向操作者发出报警信号,等待操作者进行下一步指令动作。其系统动作流程图如图10所示。
4.2 系统程序设计
4.2.1 变速模块程序设计
图11为变速模块程序设计,实现控制电机的加速与减速控制。开始时设置机器人的速度变量speed为150,若当机器人当前速度小于255时,操作人员按下遥控器编码为68的前进加速鍵机器人速度变量speed的值将逐渐增加10。当机器人当前速度大于100时,操作人员按下遥控器编码为67的后退加速键机器人速度变量speed的值将逐渐减少10(注:作为机器人的安全保护,若机器人的当前速度低于150时,则电机将无法拥有足够的动力驱动侦探机器人进行运动)。
4.2.2 超声波控制模块程序设计
图12为超声波模块程序设计,其超声波传感器连接至机器人主控板6号信号口,当侦探机器人后方遇到障碍物时,机器人车体电机速度变为零,机器人立即停止,当操作人员再按下遥控器编码为64的前进键时,侦探机器人将继续前进。
4.2.3 运动模块程序设计
图13为运动控制模块,当操作人员按下遥控器编码为69的开始/结束键时,机器人中的主控板进入待机或关机模式。按下遥控器编码为64的前进键,机器人车体两侧电机按初设定转速值正转使机器人向前运动,同理按下遥控器编码为25的后退键,机器人车体两侧电机按原设定转速值开始反转使机器人向后倒退。当按下遥控器编码为7的左转按钮时,机器人车体中左侧电机转速保持不变,右侧电机转速将增加100使机器人向左运动,同理当按下遥控器编码为9的右转按钮时,机器人车体中右侧电机转速保持不变,左侧电机转速将增加100使机器人向右运动。按下编码为21的自转按键时,机器人车体左侧电机保持正转转速、右侧电机将按原转速开始倒转使机器人做原地旋转动作。按下编码为12的左后转按键时,机器人车体中左侧电机将在原转速基础上开始倒转、右侧电机在原转速上增加100开始倒转,使机器人实现左后倒转的运动;反之按下编码为24的右后转按键时,机器人车体中右侧电机将在原转速基础上开始倒转、左侧电机在原转速上增加100开始倒转,使机器人实现右后倒转的运动。
4.2.4 人体红外探测模块程序
图14为侦探机器人人体红外探测模块程程序,其人体红外传感器连接至机器人主控板3号信号口,当机器人前方探测出有受困者时,传感器将信息传送至主控板,主控板接收后再将信息发送至远程操控人员的控制终端。
5 结语
通过运行测试证明,该生命探测机器人验证模型结构灵活,可通过远程控制机器人验证模型进行多方向的运动,利用多种传感器对事故现场的生命体进行探测,利用无线摄像头获得事故现场的环境情况并实时传输到手机或电脑屏幕,有利于营救人员直观、准确的做出判断。
参考文献
[1] 高力,王庭有.基于STM32的无线实时监控智能履带小车设计[J].新技术新工艺,2016(8):12-14.
[2] 张涛然,陈小军.道路清障小车的结构设计[J].科技风,2017(26):18.
[3] 王玉成,王有庭,徐丽娟.遥控履带小车视频监控系统设计[J].新技术新工艺,2010(9):39-42.