
便携式跟踪光伏发电装置设计及其跟踪效果分析
2019-11-29 02:16张锡鑫刘德利宋鹏飞田文涛
发电设备 2019年6期
张锡鑫, 杨 帆, 刘德利, 殷 谦, 宋鹏飞, 田文涛
(东南大学 能源与环境学院, 南京 210096)
太阳能具有储量丰富、利用方便的特点,近年来发展十分迅速。据国家能源局的数据,2016年全球光伏新增装机量76 GW,其中我国新增装机量占45.5%,达34.5 GW[1]。为提高设备对太阳能的利用效率,可利用太阳能跟踪系统使光伏电池板受光面始终朝向太阳,从而提高电池板的太阳能接收率,采用了太阳能跟踪系统的太阳能利用设备最高可提升30%以上的利用效率[2-3]。近年来,随着移动智能设备、电动汽车的广泛使用,以及应急、野外发电方面的需求,移动式光伏设备具有广阔的发展空间。
目前常见的太阳跟踪方式主要有闭环的光电或图像传感器跟踪、开环的视日运动跟踪及开闭环相结合的跟踪模式[4]。王金平等[5]设计了一种基于可编程编辑控制器(PLC)的槽式太阳能集热器视日运动跟踪系统,成本较低,采用的算法精度与国际上较先进的高精度太阳位置的计算算法相当;王红睿等[6]设计了一种开环视日运动跟踪及闭环视觉伺服控制相结合的跟踪系统,提出了基于图像信息的跟踪系统切换方法;李相俊[7]提出了一种基于Arduino控制器的闭环光电太阳跟踪系统,可实现物联网功能。
目前的研究均针对固定式的太阳能利用设备,体积较大且成本较高。因此,笔者设计了一种便携移动式、开闭环相结合、低成本的双轴太阳能跟踪系统,并针对该系统进行了相关的模拟分析。
1 整体方案
笔者所设计的移动双轴跟踪系统整体结构见图1,具体的系统三维设计见图2。
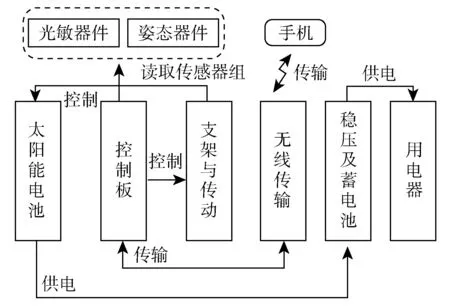
图1 系统整体结构示意图


1—稳压器及电压电流传感器;2—舵机;3—支架;4—实时时钟;5—控制板;6—姿态传感器;7—温湿度传感器;8—蓝牙无线传输模块;9—光敏二极管模块;10—光敏电阻模块;11—光伏电池板;12—蓄电池
图2 系统三维设计图
该系统主要由太阳能电池、控制板、传感器组、支架与传动、无线传输、稳压及蓄电池和用电器部分组成。控制板通过读取传感器组中各组件的数据,经处理后通过控制支架传动器件以实现电池板跟踪太阳的目的;同时控制器可将电池板角度、电压、电流、环境温度及湿度等数据通过无线传输部分传输至用户手机,或者接收手机发出的控制指令;光伏电池板产生的电能则经稳压及蓄电池稳定处理后,供给用电器使用。
2 软硬件的设计
2.1 软件设计
闭环太阳跟踪系统设备灵敏度高,设计比较简单,但受天气及其他因素影响较大,可能发生误动;开环太阳跟踪系统的设计制造比较简单,但不够灵活[8]。若可以将两者优势恰当地结合在一起,避免其中的缺陷,辅以稳定系统,则可以进一步提升跟踪的精度及设备的安全性。相比基于图像传感器的闭环太阳能跟踪模式,光电传感器组成本较低。综上,笔者设计的系统采用了闭环光电跟踪模式及开环视日运动跟踪相结合的跟踪模式,并实现了智能切换,以最大程度提升跟踪的精度,防止因误动带来的能量损耗及设备损坏。
系统工作于闭环跟踪模式时,控制板可分别读取设于电池板4个角上的光敏二极管的数据,将数据划分成上、下、左、右4组,分别对四周不同方向上的光强比较,并在未超限状态下通过水平及垂直方向的舵机控制太阳能电池板向光强一侧移动。另外,传感器数据相差较大时,使用较高速度移动,较低时以低速精确移动。这里的光敏传感器使用光敏二极管,这是由于光敏二极管方向性较好、响应速度快,可精确感受该方向的光强变化。
当处于云量较多或阴天等太阳光线较弱的天气状况时,不同方向上的光敏电阻差异过大,控制板会自动将跟踪模式调整到按实时时钟时间数据计算太阳位置运行的开环跟踪模式,从而保证跟踪的效果,防止出现误动等异常情况。光敏电阻可感受的范围较大,可更为迅速地感受到周围环境光强的变化,因此选用了光敏电阻。
为防止系统频繁切换工作模式而造成不必要的能量损耗及安全问题,控制板内有延时程序,当环境光照变化时间超过一定限值时,才会允许跟踪模式进行切换。跟踪控制部分的程序流程见图3。

图3 跟踪控制程序流程图
为了保证跟踪精度,开环跟踪模式采用的太阳方位计算公式如下[8],其中所需的时间数据可通过读取实时时钟芯片获得。
(1)
αs=arcsin(sinφ·sinδ+cosφ·cosδ·cosω)
(2)
γs=arccot(sinφ·cotω-cosφ·tanδ·cscω)
(3)
ω=(t-12)·15
式中:δ为太阳赤纬角,(°);αs为太阳高度角,(°);γs为太阳方位角,分别以地平线及正南方向为0°,(°);n为当日日期在该年内的序号;φ为当地纬度,(°);ω为太阳时角,当时间为上午(即太阳位置在东南方向时)符号为正,(°);t为当地时刻。
2.2 硬件设计及选型
2.2.1 控制器的选型
为了满足系统的控制要求,控制器选用了Arduino NANO v3。Arduino NANO v3采用一块贴片式ATmega328P 8位处理器作为主控芯片,尺寸较小且本身电流只有19 mA,但引脚最高可输出200 mA电流,可以驱动舵机。Arduino NANO v3共有22个可用引脚,其中6个数字引脚具有输出脉冲宽度调制(PWM)信号的功能,能够用于控制舵机,所具有的8个模拟输入引脚可以方便地连接光敏器件。而采用Arduino IDE编辑控制程序可以节省编制程序所需的时间以提升效率[9]。
2.2.2 驱动电动机的设计及选型
与步进电动机相比,舵机具有反应快速、精度较高且功耗较小等特点。同时,每台步进电动机往往需要4个或更多的I/O口用于控制,而舵机仅需1个具有输出PWM信号功能的I/O口即可控制,可以节省I/O口资源,因此该系统选择舵机作为跟踪支架传动装置。为了对舵机进行选型,还须要对各个方向上舵机所需要的扭矩进行计算。
该系统发电所用的单晶硅太阳能光伏电池板质量为230 g,多功能支架质量分别为42 g、38 g,稳压器及其他器件质量约250 g,电池板距舵机约5 cm。为保证装置正常工作,舵机所需提供的扭矩可按下式计算[6]。
T=ε·m1·d
(4)
式中:T为舵机所需扭矩,kg·cm;ε为安全系数,取2;m1为需要运载的质量,kg;d为距舵机的距离,cm。
经计算可得,垂直方向上运载电池板及支架需要5.22 kg·cm以上的扭矩,而水平方向上扭矩与舵机质量有关,估算舵机质量为60 g,可得需扭矩约5.42 kg·cm。因此,可以选用MG996R型质量为55 g的舵机,标称扭矩为9.4 kg·cm。
2.2.3 稳定系统设计
开环控制模式不具备反馈调节功能,因此运行误差会逐步累积,造成精度下降[10];而在太阳能光伏跟踪系统中,风、振动等因素都会造成误差。为防止系统在长时间的开环跟踪状态下误差过大,导致跟踪失效,该系统使用姿态传感器读取太阳能电池板姿态数据,发送到控制板,辅以PID控制来减少运行误差。稳定控制系统结构见图4。
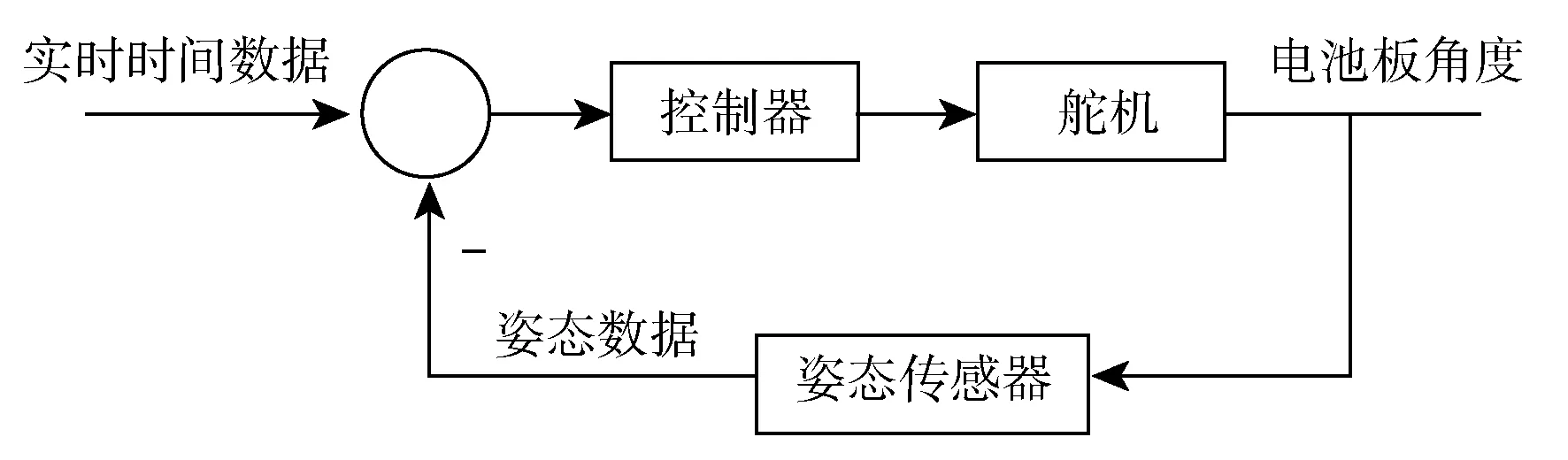
图4 开环模式稳定控制系统结构图
2.3 辅助手机应用设计
为了提高系统的易用性,方便用户实时掌握光伏发电装置的工作及环境状态,该系统使用蓝牙无线通信模块以实现与用户手机连接。开发了专用的安卓手机应用,简单易用,进一步提升了操作界面的友好性,并以此为基础建立手机-发电设备间的物联网连接。
应用程序的功能可分为:
(1) 连接,用于建立或断开与光伏装置间的无线传输。
(2) 状态监控,可对装置的工作角度、环境温度、环境湿度、实时电压、实时电流及跟踪模式进行无线监控,并具有更为直观图形化界面。
(3) 数据记录,可将每秒接收的工作数据记录并输出文件,方便进行设备性能或故障分析。
(4) 遥控控制,手机应用可控制设备的垂直、水平角度及各个方向上的运动上下限,方便某些特殊情况的应用及测试。
(5) 系统校准,可使用手机应用对设备上的实时时钟进行校准,防止因时钟不准而造成的工作误差,使用地点及纬度的不同也会影响开环视日轨迹跟踪的精度,因此手机应用可以通过GPS定位数据对设备位置信息进行校准。
(6) 天气预报,当手机联网时,可通过定位信息获取当地的实时天气预报,并对设备运行状况进行预测。
具体的手机应用程序流程见图5。

图5 手机应用程序流程图
3 模拟及分析
为验证系统的太阳跟踪效果及适用的地域范围,笔者使用MATLAB软件并结合相应公式,对不同纬度下采用了双轴跟踪的光伏发电系统相比其他单轴或未跟踪系统的效率提升程度及理论发电量进行了理论模拟分析。
3.1 跟踪模型的建立
根据相关文献资料,对于某一平面上接收的太阳能量可以分为直射、散射及反射[11],具体的计算见下式。
(5)
IH=IB+ID
(6)
式中:ΦT为任意平面上接收的太阳能量,W;IB为处在平均日地距离时的太阳辐照强度,取1 367 W/m2;Pm为大气透明度,与各地辐射观测值有关,通常取大气光学质量m为2时的值;A为平面面积,m2;θ为太阳入射角,(°);ID为太阳散射辐射强度,W/m2;β为平面在垂直方向的倾斜角,(°),假设为45°;ρ为地面反射率,取0.2;IH为太阳总辐照强度,W/m2。
由于对实际当地太阳直接辐照强度的计算须要对大量数据进行收集与分析,具有一定的困难及复杂性,为了方便分析并贴近实际情况,笔者在模拟过程中使用了由美国国家宇航局提供的22年间平均太阳直接辐照强度观测数据。太阳能光伏电池板的理论实际发电量与电池板的转化效率有关,具体关系见下式。
QS=τ·ΦT·ηd
(7)
式中:QS为设备理论发电量,J;τ为发电时间,s;ηd为电池板的转化效率,%。
该系统所采用的单晶硅太阳能光伏电池板面积为0.046 75 m2,转化效率约为17%。
某一平面上太阳入射角可以定义为阳光入射线与平面法线间的夹角[12]。对于双轴系统而言,该夹角可认为是0°[2],但对于面向南方的任意倾斜平面有下式关系。
cosθ=sin(φ-β)·sinδ+cos(φ-β)·
cosδ·cosω
(8)
对于水平单轴跟踪系统,可采用下式计算太阳入射角[11]。
cosθ=sinβ·sinα+cosβ·cosα·
cos(γs-γn)
(9)
式中:γn为任意平面的方向角,即任意倾斜平面的法线在水平面上的投影与正南方向线之间的夹角,在水平跟踪模式下,可认为γn与γs的差值为0°,(°)。
对于垂直单轴跟踪系统,可认为β为太阳高度角αs的余角,再代入式(8)进行计算,模拟中假设水平方向为面向正南方向。
不同跟踪系统的跟踪效果可以利用cosθ进行比较,并定义采用不同跟踪方式接收太阳能量与双轴跟踪方式间接收太阳能量的比值为η。
3.2 模拟结果与分析
通过对不同纬度下采用不同跟踪模式的系统理论发电量、接收太阳能量比值进行模拟计算,所得结果见图6。
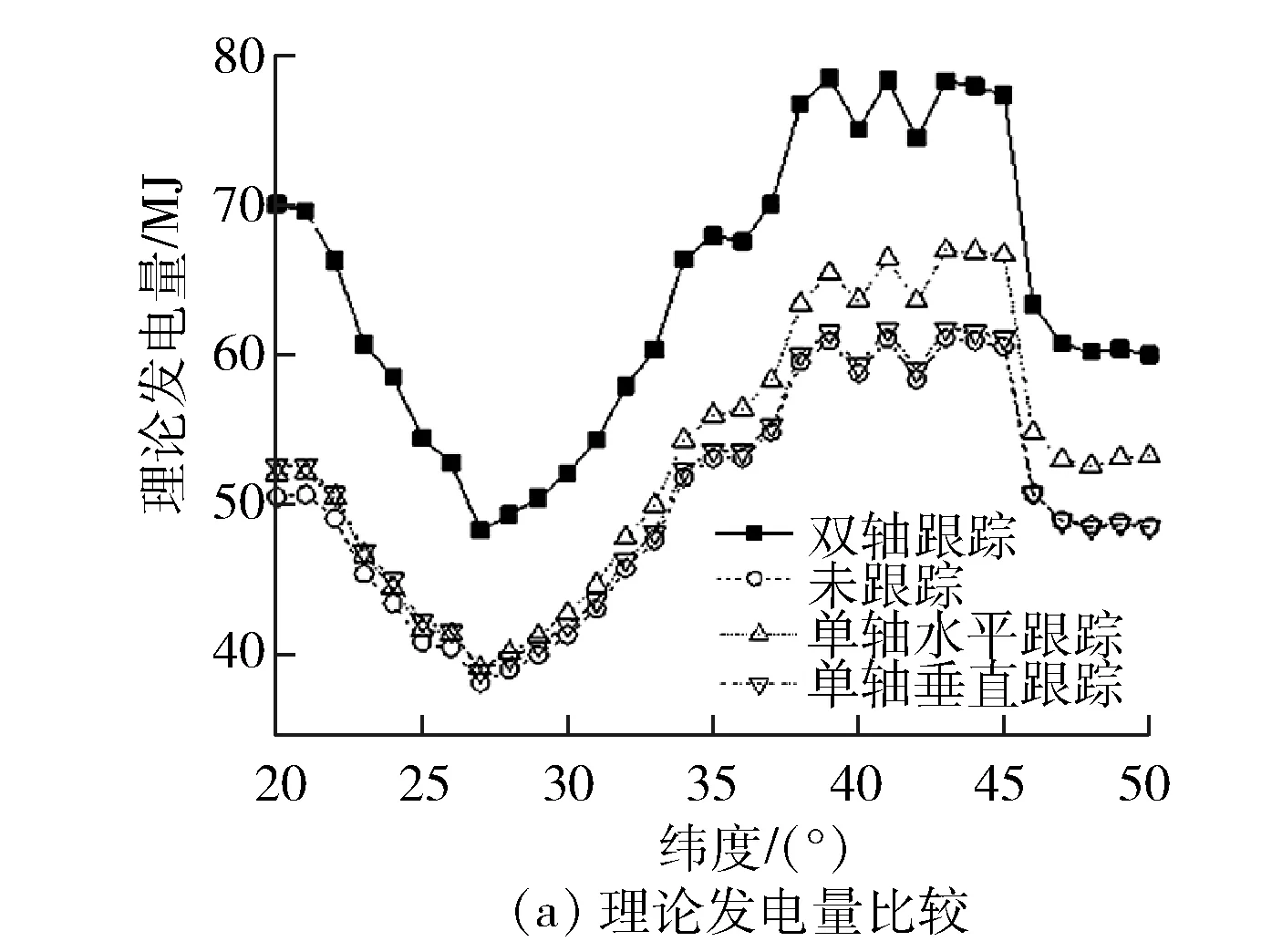

图6 不同纬度下系统的模拟计算结果
表1为不同跟踪模式下系统接收太阳能量对比。

表1 不同跟踪模式η平均值对比
从图6(a)可知:各种跟踪模式理论发电量与纬度间的关系曲线形状大致相同,纬度主要通过影响当地实际太阳直接辐照强度来影响太阳能光伏电池板的发电量,采用同一跟踪模式时纬度间跟踪效果差异较小。综合表1结果可知:不论采用何种跟踪方式都可以提升电池板的发电量,但双轴跟踪模式的跟踪效果要显著高于单轴跟踪模式,在不同纬度上的效果提升在18%~27%。表1所得结果与文献[13]所得结果接近,验证了模型的有效性。
从图6(b)可知:电池板接收的太阳能量理论比值随着纬度的上升而逐渐缓慢上升,即相比双轴跟踪的跟踪效果提升程度在缓慢下降,这与非跟踪模式下选择的垂直方向倾角有关。结合公式分析可知:每一纬度下均存在一最佳垂直倾角,处于该倾角下的非跟踪太阳能电池板发电量最高,且这一倾角与纬度相近。由于45°倾角较大,因此采用倾角的非跟踪太阳能光伏电池板在较高的纬度下性能更佳。
综上,采用双轴跟踪的太阳能光伏发电系统可以使发电效率得到明显提升,同时纬度对发电效率提升的影响有限,可见双轴跟踪系统具有广泛的适用纬度范围。
3.3 实际跟踪效果的验证
为了验证所设计系统的实际工作效果,笔者对完成的装置实物进行了跟踪效果测试,测试时间为夏至,结果见表2、表3。

表2 双轴垂直跟踪效果测试结果
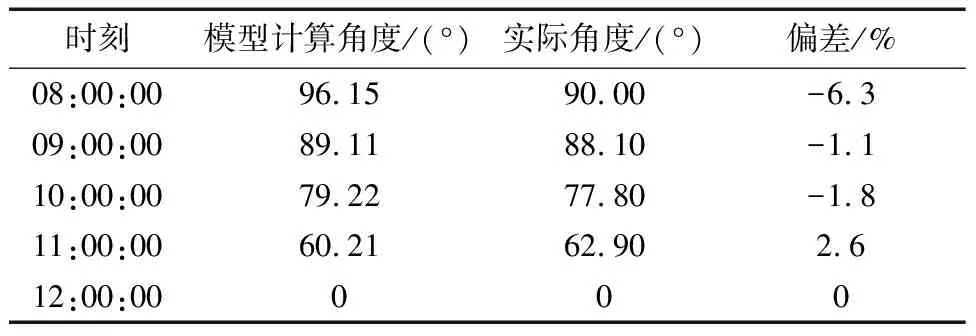
表3 双轴水平跟踪效果测试结果
由表2、表3数据可知:双轴跟踪系统与计算所得结果间误差大多在5%以下,符合光伏跟踪系统的精度要求;而在08:00:00时双轴水平跟踪效果的误差大于5%,与所选用的舵机最大运动角度有关。
4 结语
采用跟踪系统的太阳能光伏系统发电效果相比非跟踪系统具有明显的提升。针对移动智能设备充电、应急和野外供电需求,笔者设计了一种采用闭环光电传感器跟踪及开环视日轨迹跟踪相结合跟踪模式的双轴太阳能光伏发电系统,可根据运行环境状况实现两种模式间的转换。为了提高系统的易用性,还设计了专门的手机应用,可方便地对运行状况进行监控及记录。
为了验证该跟踪系统的有效性及适用范围,笔者对采用跟踪及未跟踪两种模式下光伏电池板的理论发电量及比值进行了模拟计算。双轴跟踪模式的跟踪效果要显著高于单轴跟踪模式,在不同纬度上的效果提升在18%~27%,实际测试也说明跟踪系统符合设计的要求。
猜你喜欢
铝加工(2021年5期)2021-12-02
军事文摘(2021年18期)2021-12-02
测绘学报(2019年4期)2019-06-10
电子制作(2018年12期)2018-08-01
知识就是力量(2017年12期)2018-01-15
制造技术与机床(2017年8期)2017-11-27
凿岩机械气动工具(2017年3期)2017-11-22
齐鲁周刊(2017年29期)2017-08-08
照明工程学报(2016年3期)2016-06-01
焊接(2015年9期)2015-07-18
