锚泊安全视域下的锚链振动特征检测实验研究
2019-11-16 11:06王涌韩东苑志江蒋晓刚
中国测试 2019年10期
王涌 韩东 苑志江 蒋晓刚

摘要:锚链振动特征检测研究旨在解决舰船走锚预警问题。利用专门实验装置模拟舰船走锚过程,实时检测锚链振动加速度,并采用Matlab编制的专用程序对进行耦合计算等处理,进而得到锚链振动特征值并输出相应的曲线图形。实验结果表明:在锚链绷紧、锚翻出底土、跳锚、走锚等状态下,锚链振动频率会发生突变。相同锚泊环境下,底质、船重一锚重比、链重均对锚链振动特征有影响:锚链振动频率突变极值越大巨次数越多时,舰船越难走锚;泥沙底的突变频率平均极值为砂砾底的1.1~1.4倍;随着链重的增加,锚链振动平均频率和突变频率平均极值均随之增大,舰船从正常锚泊演变到走锚的时间变长,锚链振动频率突变的次数也越多。结论可为舰船锚泊安全状态监测及走锚预警深入研究提供参考依据。
关键词:安全;舰船;锚泊;走锚;振动频率
中图分类号:U675.92 文献标志码:A 文章编号:1674-5124(2019)10-0159-05
收稿日期:2018-10-23;收到修改稿日期:2018-12-24
作者简介:王涌(1974-),女,山东潍坊市人,讲师,博士,主要从事军事航海安全保障方面的研究。
通信作者:苑志江(1983-),男,河北邢台市人,讲师,博士,主要从事舰船安全防护方面的研究。
0 引言
舰船锚泊安全受风、浪、流等海洋环境因素的综合影响,在恶劣海况条件下走锚风险通常显著增大。如值班人员不能准确判断和及时发现走锚,极易引发碰撞、触礁、搁浅等次生事故,因而走锚的判断和预警始终是锚泊安全领域研究的热点[1-6]。锚链作为锚泊系统的重要组成部分,其底端所受锚泊力和顶端所受舰船外力间的平衡状态直接影响舰船锚泊安全。诸多学者从这一视角开展了走锚判断及预警研究[2,6-7],但海洋环境要素影响的动态性和复杂性,使得实时获取精确应力信息的难度加大,现有研究多局限于理论分析和模拟仿真层面,难以付诸实际工程应用。鉴于锚链所受应力变化将外化为其振动频率等的变化[8-9],本文拟开展锚链振动特征的检测实验,并探究其与舰船走锚的关系,以期用于锚泊安全状态监测。
1 实验原理
锚链两端分别连接着锚和船体,按其状态通常可分为铺底段和悬链段两部分。铺底段是指直接铺放在海底与锚连接的锚链,其摩擦力和锚抓力共同提供了舰船锚泊力[10]。悬链段是指悬垂于海水中的锚链,舰船所受外力作用于其顶端,在风浪流等海洋环境要素的作用下,其所受应力呈现动态变化[11]。悬链段与铺底段的分界点将随舰船所受外力、锚链涡激升力、水深和海流流速等的改变而改变。
舰船正常锚泊时,悬链段通常呈自然悬垂状态,其振动主要因海流的涡激升力而产生。当舰船所受外力增大时,悬链段所受应力随之增大因而不断张紧,可能将铺底段前端拉起而成为悬链段的一部分,进而引起铺底段应力的相应变化。当铺底段长度减小为零时,整个锚链被神直呈现绷紧状态并伴随剧烈抖动,此时将发生跳锚、拖锚、走锚等现象。这一演变过程中,锚链因所受应力变化而呈现出从自然悬垂→拉伸抻直→绷紧抖动的状态变化,本文拟借助技术手段检测锚链的振动频率和幅值变化,进而探究锚链振动特征与舰船锚泊状态的对应关系。
2 实验环境的构建
为开展锚链振动特征检测实验,设计制作了原理性实验装置,主要包括模拟锚泊环境、实验船模及模拟锚设备、振动特征检测装置三部分。
2.1 模拟锚泊环境
模拟锚泊环境由锚泊水域、模拟流场和模拟风场三部分构成。
锚泊水域采用6.0m×0.4m×0.5m的循环水池构成,在其底部沉入2.5m×0.36m×0.1m的铁皮槽,用于盛装泥沙等来模拟锚地底质。
模拟流场由定向流场和湍流场混合而成。定向流场借由循环水池的自身功能获得,即通过调节水池进水和出水速度以获得不同的流速。湍流场借由水池内适当位置安放的潜水泵形成,其与定向流场相混合,模拟出较为接近实际海况的流场。
模拟风场时,将电风扇置于循环水池附近的合适高度,以提供风速恒定风向规律变化的风场,同时配合使用1600r/min的大功率电吹风形成特定风向的瞬时强风。
2.2 实验船模及模拟锚设备
实验船模及模拟锚设备的选取需要考虑锚的类型、船模尺度缩比、船重:一锚重比、锚重一链重比等因素的影响。
目前舰船配置的锚主要有霍尔锚、斯贝克锚、AC-14锚等类型。鉴于霍尔锚抓重比相对较小、工艺简单、结构合理等特点,定制了两个分别重100g和40g的模型用于实验。
限于水池条件等,实验船模难以同时满足船模尺度缩比和船重、锚重、链重之间的比例关系。实验中,选取缩比为1:115的遥控驱逐舰模作为船模,并通过加载配重来调整船重。根据水池的深度,确定了统一的锚链长度,通过选用不同材质来改变锚链质量,并配合不同质量的霍尔锚模型,以探究船重一锚重比对舰船走锚的影响。同时,考虑到船模受风面积较小,在船模前部加装挡风板增大其受风面积,以实现走锚的模拟。
2.3 振动特征检测装置
振动特征检测装置主要包括数据采集模块和数据处理模块。
数据采集模块由传感器模块、单片机模块和LCD显示屏三部分组成。传感器模块的主要部件是ADXL345B三轴加速度传感器[12],经防水处理后安装于悬链段顶端,用于实时采集X、Y、Z3个轴的运动加速度。传感器采集到的数据通过I2C数据传输协议传给单片机模块,再由单片机控制LCD显示数据,并转换成串口信号无线发送给数据处理模块。为减小传感器自身质量对锚链振动特征的影响,对传感器数据线做了延伸加长处理,使测量芯片相对独立于传感器模块直接与锚链接触。
數据处理模块主要包括USB转换模块、上位机程序和输出装置。实验采集到的数据通过专用的USB转换模块输入上位机,利用Matlab编制的专用程序可对三轴振动加速度进行耦合等处理,从而输出锚链振动特征曲线图形。
此外,还设置图像采集系统:一部摄像机用于全程拍摄舰船从正常锚泊到走锚的状态变化,一个镜头用于专门监测锚的位置变化等情况,以配合后续的实验结果分析。
3 检测实验结果
3.1 实验方法
实验中模拟了泥沙底和砂砾底两种常见锚地底质。按照船重与锚重的比例关系,实验船模设置两组:裸船模(1360g)配合小霍尔锚(40g)模型、配重船模(1760g)配合大霍尔锚(100g)模型。限于水深条件,锚链长度确定为2.3m,与40g锚匹配的锚链质量分别为70g、105g、155g,与100g锚匹配的锚链质量分别为155g、325g、475g。
为探究底质、船重、链重等因素对舰船锚泊安全的影响,按底质和实验船模的不同组合为4个实验系列,每个系列又因锚链质量不同分为3组。每组实验重复进行,直至有效数据达到10次。
3.2 实验数据处理
为方便分析锚链振动特征与走锚的关系,对各组数据取平均值,获得以下参数:正常锚泊状态下的平均耦合加速度和平均频率、走锚过程中的频率特征变化极值和频率平均极值、正常锚泊与走锚时的频率差等,具体结果如表1~表4所示,由表1~表4的数据计算对应工况下的泥沙底与砂砾底的突变频率平均极值之比,并分别求取裸船模和配重船模两种实验条件下的平均值,可知泥沙底的突变频率平均极值为砂砾底的1.1~1.4倍。
4 分析与讨论
4.1 总体规律
根据某组实验的耦合加速度与振动频率,绘制了图1,其横坐标为时间(s),纵坐标分别为耦合加速度(m/s2)和频率(Hz)。由图1可知,该组实验共发生了四次加速度和振动频率的显著变化,且二者有高度一致的对应关系。结合实验时采集的视频资料分析发现:前两次显著变化发生在锚链绷紧状态时,第三次显著变化时锚发生了微小位移但并未走锚,第四次显著变化对应着锚翻出底土,此后船模进入走锚漂移阶段。实验结果表明,从正常锚泊状态到走锚的过程中,锚链的振动加速度和振动频率在特定状态下会发生显著变化,初步验证了基于锚链振动特征监测舰船锚泊安全状态这一技术思想的可行性。
4.2 底质的影响
选取裸船模~40g锚~105g链组合,比对砂砾底和泥沙底两种底质下的实验结果。
由表5可知:各项数据值均表现为泥沙底大于砂砾底。泥沙底时,正常锚泊平均频率为0.2799Hz,走锚频率平均极值是其1.62倍;砂砾底时,正常锚泊平均频率0.2123Hz,走锚频率平均极值是其1.34倍。其主要原因在于泥沙底提供的锚抓力和链摩擦力均大于砂砾底,从而构成相对较大的锚泊力,相应地要打破这种平衡状态就需要相对较大的悬垂段锚链应力,由此引起的平均振动频率及走锚频率极值也随之相应增大。
由图2、图3可知:砂砾底锚泊的舰船更易发生走锚。相对于砂砾底而言,泥沙底锚泊的舰船从正常锚泊到走锚状态持续的时间更长,走锚之前锚链的绷紧次数较多,振动频率极值较大。
4.3 船重~锚重比的影响
为分析船重一锚重比的影响,选取泥沙底~155g链条件下的两组数据进行比对:一组为配重船模~100g锚,一组为裸船模~40g锚,相应地分别称之为大船、小船。
由表6可知:大船的各项数据值均大于小船。其主要原因在于:舰船的锚重通常依其与船重的比例配置,大船配置的锚重必然大于小船,相同锚泊情况下其提供的锚泊力相对较大,打破平衡状态所需的锚链应力也相对较大。进一步计算发现,无论大船还是小船,走锚频率平均极值与正常锚泊平均频率之比均为1.73,若以此值作为走锚预警的阈值,后续研究可忽略船型的影响。
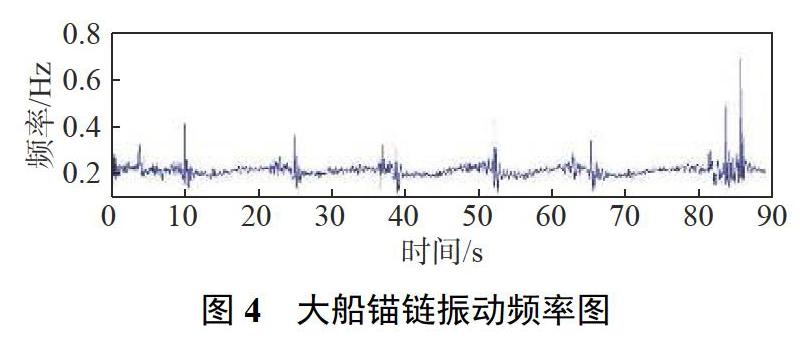
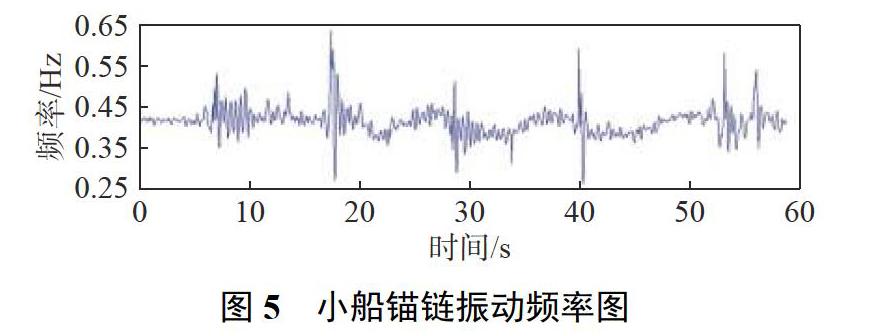
由图4、图5可知,相同锚泊环境下小船更易走锚。小船从正常锚泊到走锚状态持续的时间较短,锚链绷紧次数较少。值得注意的是,此组实验中大、小船的锚重~链重比分别为1.55和3.875,即大船组合配置的是最轻锚链,而小船组合配置的是最重锚链,仍然出现了小船更易走锚的现象。
4.4 链重的影响
为分析链重对锚链振动频率和走锚的影响,选取配重船模~100g锚~砂砾底组合,分析比对155g、325g、475g3种不同链重时的实验结果。
由图6~图8可知,链重对锚链振动频率有显著影响,随着链重的增加,锚链振动平均频率和频率平均极值均随之增大[13]。进一步观察图6一图g可知,随着链重的增加,舰船从正常锚泊演变到走锚状态持续的时间越长,锚链振动频率发生显著变化的次数也越多。采用155g锚链时,锚链振动频率显著变化3次即进入走锚漂不刻犬态,持续时间不到40s。采用325g锚链时,锚链振动频率第5次显著变化后锚翻出底土并发生位移,第6次显著变化后进入走锚漂移状态,持续时间近60s。采用475g锚链时,锚链振动频率第g次显著变化时,锚才翻出底土发生位移,此后继续受强风影响发生拖锚,150s后舰船仍未达到走锚漂移状态。其主要原因在于:链重增大时其铺底段提供的摩擦力较大,锚泊力也相应随之增大,因而增加了走锚的难度。
5 结束语
本文采用专门设计的原理性实验装置,模拟了舰船由正常锚泊过渡到走锚状态的整个过程并全程检测了锚链的振动特征。通过改变底质、船重一锚重比、链重等实验条件,研究了各因素对走锚及锚链振动频率的影响。结果表明:舰船由正常锚泊到走锚状态的演变过程中,锚链振动频率会发生若干次显著变化,且与锚链的绷紧、翻出底土、走锚等状态变化相对应。锚地底质、船重、链重等对舰船锚泊安全均有影响。相同锚泊环境下,泥沙底比砂砾底更为安全,舰船锚重越大越难走锚,锚链越重也越难走锚,且難于走锚情况下的锚链振动频率幅值通常大于易于走锚的情况,但并未发现数值上的明显规律。后续将从原理上深入分析锚链振动频率变化的深层原因,并进一步确定走锚预警的阈值,以期通过锚链振动特征实现舰船锚泊安全状态监测和走锚预警。
参考文献
[1]熊振南,林庆武,周少雄.提高GPS锚位监测报警可靠性的探讨[J].集美大学学报(自然科学版),2000,5(4):53-58.
[2]李伟,于洋,刘贤朋.基于锚链状态监测的锚泊安全评估团.大连海事大学学报(自然科学版),2004,30(1):55-57.
[3]薛仕中.雷达在船舶走锚判断中的应用[J].船海工程,2010,39(3):162-165.
[4]吴卫兵,尹建川.准确判断船舶走锚方法[J].中国航海,2012,35(4):124-127.
[5]何庆华,曹玉墀.利用ECDIS判断船舶走锚探析[J].航海技术,2013(5):40-42.
[6]孙大铭,洪碧光,李强,等.单锚泊船舶走锚预警系统的研究团.航海技术,2010(5):2-4.
[7]OKAZAKI T,HIRAI Y.Development of a support system topredict dragging anchor phenomenon for mariner[C]//Intern-ational Conference on System of Systems Engineering.IEEE.2011:185-90.
[8]LU Y,BAI C.Dragging anchor event and theoreticalverification of single mooring ship[C]//International Confe-rence on Frontier of Computer Science&Technology,IEEE.2015:209-213.
[9]張聪,金良安,王涌.舰船走锚报警技术研究现状与展望团.舰船电子工程,2017,37(5):1-4.
[10]LIU H.Recent study of drag embedment plate anchors inChina[J].Journal of Marine Science and Application,2012,11(4):393-401.
[11]于洋,蒋治强.海流对深水锚泊船锚链静力特性的影响[J].中国航海,2013,36(1):101-104.
[12]徐明,王涌,徐敬.基于ARM Cortex-M3的舰用无线振动检测系统[J].舰船电子工程,2014,34(9):129-132.
[13]金良安,张聪,王涌.锚泊时锚链的振动频率与质量关系实验研究[J].科学技术与工程,2017,17(24):294-298.
(编辑:徐柳)