光纤光栅肘关节角度测量方法
2019-11-16 11:06马晓源路长厚李学勇吕宇翔谷雨撞
中国测试 2019年10期
关键词:可视化
马晓源 路长厚 李学勇 吕宇翔 谷雨撞


摘要:为解决现有关节角度测量装置的不足,提出一种基于多光纤布拉格光栅(fiber Bragg grating,FBG)的关节角度测量方法。该方法将多光纤光栅固定在套袖上,套袖戴在肘关省上,辅以自主设计的基于LabVIEW关节角度计算及数据处理的程序和可视化界面,实现对肘关节角度实时测量并输出可视化数据。该套袖具有柔性化程度高、不受电磁信号干扰、测量效率高、结构简单的优点。对所制作套袖进行测量实验,实验结果表明,该测量方法的误差约为2.88%,重复性误差在4%以下,具有.实际的应用价值。
关键词:关节角度;光纤布拉格光栅;分布式测量;曲线重构;可视化
中图分类号:TH712 文献标志码:A 文章编号:1674-5124(2019)10-0028-06
0 引言
人体关节运动转角的测量对医用康复用品、仿生产品的设计及其相关研究领域有着重要意义[1]。同时,关节角度测量也是人体姿态识别的基础,辅以传感网络、智能算法、先进材料等基本手段,能够将人体多关节信息融合,实现姿态识别,使传感信息全方面、多层次、立体化,对于提高人类的能力极限有着极大意义[2]。
收稿日期:2019-01-09;收到修改稿日期:2019-04-08
基金项目:山东大学基本科研业务费专项资金(2016JC001)
作者简介:马晓源(1994-),男,山东泰安市人,硕士研究生,专业方向为精密机械与仪器。
通信作者:路长厚(1960-),男,山东泰安市人,教授,博士生导师,主要研究方向为精密机械与仪器。
当前来看,对关节角度的测量,大多采用多维摄像系统、惯性传感器等常规传感器作为测量核心传感元件。Favre等[3]根据四元数求解姿态角的方法采用两个惯性传感单元,实现了人体关节角度的测量;Gabrie等[4]将加速度计和陀螺仪组合,采用无迹卡尔曼滤波对数据进行处理,测量得出的角度无噪声影响,精度较高。Jansen等[5]利用3D摄像头捕获动作图像信息,并从中提取出关节运动信息。上述方法所需要的测量环境比较苛刻,传感部件一般较大,对人体约束大,因此不适宜正常情境下人姿态的测量。Park等[6]利用共晶镓锢制作的传感器实现了对下肢三个关节角度的测量,并能够准确地依据下肢关节角度反演步态。除上述成果之外,近年来,用于测量关节角度的光纤传感器也有很大发展,张振海等[7]利用光纤的宏弯损耗特性设计了一种用于捕捉人体关节角度的光纤角度传感器,该传感器线性度好,灵敏度高,适用于外骨骼机器人的角度信号的捕捉。李敏等[8]同样利用光纤宏弯损耗特性设计了用于测腕关节角度的传感器,该传感器多种性能指标优越,但是使用此种传感器需要固定前臂位置。Silva等[9]将光纤与织物结合,用以测量关节弯曲角度,这种方法由于织物和肢体产生相对滑动,因此需要用专门器具标定进行误差补偿后才能够达到理想精度。
为了能够轻便准确地测量肘关节夹角,而又不对测试者运动造成太大限制,本文设计并制作了一种基于多光纤布拉格光栅(fiber Bragg grating,FBG)的“传感套袖”,首先确定适合的多光纤光栅分布式布置方法,然后以此为基础提出了关节角度测量方法,接着利用LabVIEW结合曲线重构算法设计了能够实时反映关节角度和关节处肢体姿态的可视化平台,最后通过实验证明了该方法对测量关节角度有较高的检测精度。
1 光纤布拉格光栅角度测量机理
1.1 肘关节模型分析
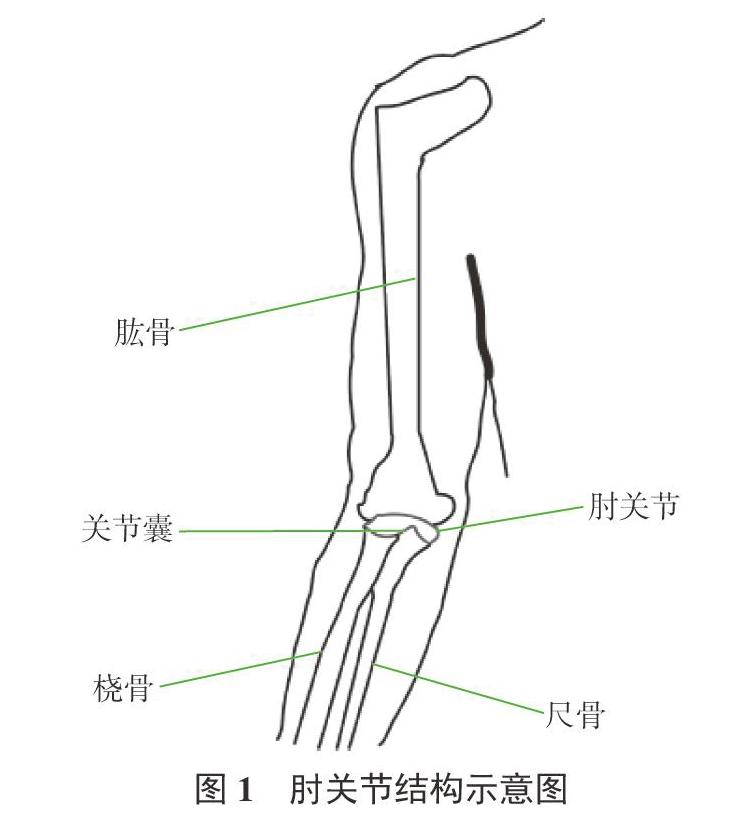
手肘是上臂和前臂相交接的部分,也是应力由手、前臂传导至肩、躯干的重要枢纽。图1为肘关节结构示意图,肘关节由3个骨骼包裹在同一个关节囊内组成。本文以此为研究对象展开原理和实验表述。
1.2 光纤布拉格光栅布置方法
测量肘关节角度的难题在于肘关节弯曲时会产生较大变形,且以关节点变形最大,直接在该处布置FBG,变形量会超出FBG的测量范围;而在其他非关节处布置单一FBG,由于应变与关节角度相关性差,很难建立有效的输入输出关系。为解决以上问题,本文采用4个FBG分布式测量的方法,将4个FBG串联贴在手臂的背侧面,具体位置如图2所示,图中横截面图表示了光纤光柵串在手臂的周向位置,与手臂正背侧夹角为45°。当手臂运动时,关节运动使肌肉发生变形,各FBG处都会产生相应的应变,利用曲线重构的思想,计算每个贴在肘部FBG的相对坐标,进而求得前臂与上臂延长线的夹角,即肘关节角度θ。
每次测量都需要按照图2所示在手臂上粘贴光纤光栅串,这是极为不便的。为此我们将光纤光栅串缝到套袖表面,并将4个FBG按文献[10]所述用强力胶进一步固定。完成的套袖如图3所示。当带上套袖时,肘关节最大屈曲角度不到120°,故本文以肘关节0°~120°为测量范围。测量时,只需带上套袖并调整单个FBG至相应位置,其他FBG即被定位,便可测量关节角度。
2 关节角度测量算法
肘关节在运动时,所制作的套袖弹性优良,能够和手臂相对固定,贴在套袖上的光纤形状则能够反映出肢体的姿态,即使肘关节处有拐点,在套袖的缓冲下也可以将光纤看作光滑曲线,同时肢体轴线也可以看作光滑曲线。4个FBG将肘部上下临近区域的光纤分割。在较小的间距内,肢体轴线可以看作一段圆弧。设r;为第i段轴线曲率半径,αi为第i段轴线圆弧对应的圆心角,则每段轴线的参数方程可以表示为
运动时肢体轴线长度不变,但是贴在套袖的光纤会产生变形,用lire表示第i段光纤弧长,用li表示第i段光纤对应肢体轴线的弧长,h为轴线到光纤的垂直距离,则此时布置在手臂背侧的光纤段长度可以表示为
第i个FBG可以测量粘贴处的应变εi,则光纤的实际长度又可表示为
lire=(1+εi)li(3)
且在温度一定时,第i个FBG处的应变和FBG中心波长λi及其波长变化量△λi有如下关系:式中c为常数,和光纤材料有关,在此c取0.784。则第i段轴线曲率半径ri满足:
所以第i段光纤的曲率半径Ri为
Ri=ri+hsin45°(6)
为了方便对光栅点坐标进行分析计算,建立光纤曲线上Frenet标架如图4所示。
局部坐标系(xi-1,zi-1)到局部坐标系{xi,zi}的变换矩阵Tii-1为
将光栅点Oi+1看作在局部坐标系{xi,zi}中,由几何关系可知,点Oi+1相对于局部坐标系{xi,zi}的坐标Pi+1i为
Pi+1i=[Ri+1sinαi+10 Ri+1(1-cosαi+1)]T
则点O1~O4相对于全局坐标系XO0Z的坐标为其中,P10、P20、P30、P40可以表示4个FBG中心的坐标,以此计算肘关节转角。以P10P20和P30P40分别表示P10P20和P30P40连线的微量,那么向量的夹角即可表示肘关节的角度θ,则θ满足:
3 关节角度测量方法验证
3.1 可视化软件实验平台搭建
在进行实验前,首先需要建立基于LabVIEW的关节角度可视化界面,用户可以由此观察到关节实时角度。该界面包括数据采集、滤波、角度解算和角度修正4部分。图5展示的是包括硬件在内整个系统的结构图,图中除了给出系统组成部分外,还包括连接顺序和数据流向。图6是当测试者戴上套袖肘关节3次弯曲75°时,FBG3滤波前后的输出信号比较图,从中可以看出有良好的周期性。
3.2 角度修正标定
软件各组成部分中,角度修正直接影响到输出准确性所以最为重要,它包括温度补偿和角度标定,本文在此重点介绍。
FBG对温度变化敏感,所以在进行角度测量前需要消除温度影响。为此设置参考FBG(编号为0),参考FBG不受外力作用。解调仪双通道分别连接参考光栅和角度测量套袖,设λ0为参考光栅的中心波长,△T和ε分别表示温度变化量和应变,则套袖上的4个FBG中心波长变化量△λi与参考 FBG中心波长变化量△λ0可以表示为其中K∈=0.784pm/μm,表示FBG应变灵敏度;KT=8.39pm/℃,表示FBG温度灵敏系数。
温度补偿算法原理是,参考FBG承受应变为0,则其波长变化量一定是由温度变化引起的,由解调仪输出的△λ0,代入式(11)得温度变化量△T,然后将△T代回式(10)中,即可得到套袖上每个FBG消除温度变量后的应变εi。
实际上,即使经过温度补偿,测量程序得出的关节角度普遍比实际角度要小。这主要是由于在運动过程中套袖与手臂发生相对滑动引起的。因此需对系统角度输出进行标定,标定器具为可调肘关节固定支架,使用者能够通过调节其角度转盘来调节并固定肘关节角度。
以标定器具为准,对肘关节弯曲角度从0°开始至120°,以15°为步长,记录系统输出的角度,共标定10次。10次实验单组数据拟合优度在0.9522~0.9995之间,说明该方法测量关节角度有良好的线性度。求出每个角度对应的10组数据的平均值,并得到标定角度-测量角度平均值拟合曲线,如图7所示,图中该直线拟合优度为r2=0.9634,其拟合方程为y=0.9129x+0.3877,故角度修正环节提高了测量准确性。
3.3 实验验证
为检测装置的性能指标,搭建测量装置的实验平台,实验过程中平台布置如图8所示,图中包括传感套袖、光纤、解调仪、计算机和关节固定支架。由关节固定支架将关节固定在多个角度,各FBG中心波长经过解调仪和软件程序滤波、运算、角度修正等一系列步骤后,能够输出稳定且准确的角度信号。
实验时,肘关节戴上套袖由001200屈曲进行多次实验,运动过程中观察并记录对应实际角度的测量装置输出角度。表1为其中3次实验关节实际角度与测量角度的对比,经计算,测量装置误差为2.88%,可重复性误差为3.%%。图9表示3次使用套袖测量实验中,输出角度和实际角度拟合曲线,表2给出3次实验对应的拟合曲线方程。此外,对肘关节0°~120°之间每隔15°进行实验,肘关节弯曲120°(进程),然后肘关节弯曲逐渐减小至0°(回程),得到进程和回程过程中波长变化量一角度曲线,如图10所示,可以看出4个FBG均有较好的线性度。0°4 结束语
关节角度测量是实现人体姿态识别的基础,也对医疗护理和各类外骨骼机器人有着重要作用。由于目前关节测量方法柔性化不足且对人体运动约束较严重,为解决这一难题,本文根据肘关节及其附近肢体的运动范围及长度参数,提出4个FBG串联测量关节角度的方法,制作了测量肘关节角度的“传感套袖”,并构建了基于LabVIEW的可视化平台。最后对套袖进行了实验验证,实验结果表明该测量装置的测量误差约为2.88%,重复性误差为3.96%。实现了肘关节高柔性化可穿戴的测量方法。在未来的工作中,需要减少套袖和手臂的相对滑动,探究光纤光栅传递系数对测量结果的影响,还会根据各关节定制不同的光纤光栅,来测量人体多关节的角度,结合肢体运动参数,构建可穿戴的能实现人体姿态识别的传感网络。
参考文献
[1]OFLI F,CHAUDHRY R,KURILLO G,et al.Sequence of themost informative joints(SMIJ):A new representation forhuman skeletal action recognition[J].Journal of VisualCommunication and Image Representation,2014,25(1):24-38.
[2]PARK Y L,RYU S C,BLACK R J,et al.Exoskeletal force-sensing end-effectors with embedded optical fiber-Bragg-grating Sensors[J].IEEE Transactions on Robotics,2010,25(6):1319-1331.
[3]FAVRE J,JOLLES B M,SIEGRIST O,et al.Quaternion-based fusion of gyroscopes and accelerometers to improve 3Dangle measurement[J].Electronics Letters,2006,42(11):612.
[4]GABRIE L JR,BROSTOW J,HODGINS J K,et al.Automatic joint parameter estimation from magnetic motioncapture data[EB/OL].[20]7-04-01].http:hdl.Handle.net/1853/3408.
[5]JANSEN B,DEKLERCK R.Context aware inactivityrecognition for visual fall dection[C]//Pervasive HealthConference and Worksh叩s,IEEE,2006:1-4.
[6]MENGUC Y,PARK Y L,MARTINEZ-VILLALPANDO E,et al.Soft wearable motion sensing suit for lower limbbiomechanics measurements[C]//IEEE InternationalConference on Robotics&Automation.IEEE,2013.
[7]張振海,张小栋,侯育军.用于人体关节角度捕捉的光纤角度传感器的研究[J].科学技术与工程,2012,12(3):535-538.
[8]李敏,何博,徐光华,等.柔性可穿戴的腕关节运动角度传感器[J].西安交通大学学报,2018,58(12):32-35.
[9]SILVA AS,CATARINO A,CORREIA M V,et al.Designand characterization of a wearable macro-bending fiber opticsensor for human joint angle determination[J].OpticalEngineering,2013,52(12):992-999.
[10]郭伟,李新良,宋昊.表面粘贴光纤光栅传感器的应变传递分析[J].计测技术,2011,31(4):1-4.
(编辑:莫婕)
猜你喜欢
工业设计(2022年4期)2022-05-17
江苏教育研究(2022年8期)2022-04-27
中国水运(2022年4期)2022-04-27
小学教学研究(2022年3期)2022-04-08
师道·教研(2022年1期)2022-03-12
物理教学探讨(2022年1期)2022-03-08
现代信息科技(2021年21期)2021-05-07
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
智富时代(2019年6期)2019-07-24