
磁悬浮轨道几何参数测量方法研究
2019-11-15 02:19张拥军陈勇陈夏平李婷
中国测试 2019年3期
张拥军 陈勇 陈夏平 李婷

摘要:针对国内磁悬浮轨道几何参数测量技术发展滞后、第一代磁悬浮轨检设备量值溯源困难等问题,该文建立一套直接影响磁悬浮列车运行稳定和安全的几何参数评价体系,提出基于激光跟踪仪的磁悬浮轨道几何参数静态标定方法和磁悬浮轨检设备的比对办法。在唐山国家中低速磁浮交通试验基地的现场测量和比对实验表明,激光跟踪仪现场测量的扩展不确定度为0.50mm,基于激光跟踪仪的现场实验比对可以有效地揭示磁悬浮轨检设备的系统误差,为新出现的磁悬浮轨检设备进行整体量值溯源提供新的思路。
关键词:磁悬浮轨道;几何参数;激光跟踪仪;磁悬浮轨检设备;量值溯源
中图分类号:TP394.1
文献标志码:A
文章编号:1674–5124(2019)03–0046–07
Research on the measurement for the geometric parameters of the maglev railway
ZHANG Yongjun, CHEN Yong, CHEN Xiaping, LI Ting (Hunan Institute of Metrology and Test, Changsha 410014, China)
Abstract: Aiming at the problems that the domestic measurement technology for the geometric parameters of the maglev railway lags behind and there is no effective method of quantity traceability for the maglev railway inspection equipments, the paper systematically analyzed the main geometric parameters affecting the operation of maglev train and organized them into a set of evaluation system, then, presented a way of static calibration for the geometric parameters of maglev railway and a method of comparison experiment for the maglev railway inspection equipments based on the laser tracker. The situ measurement implemented in the Tangshan Low/medium-speed Maglev Experimental Line shows that the expanded uncertainty of the laser tracker in the field is 0.50 mm. The comparison based on the laser tracker effectively reveals the systematic deviation of the maglev railway inspection equipments and provides a whole new way of thinking for integrated quantity traceability of the emerging maglev railway inspection equipments.
Keywords: maglev railway; geometric parameters; laser tracker; maglev railway inspection equipments; quantity traceability
0 引言
磁悬浮轨道交通是一种新型的轨道交通方式,磁悬浮列车用磁力悬浮支撑代替了车轮支撑,解决了机械噪音和磨耗问题,从根本上克服了传统列车轮轨粘着限制,是人们梦寐以求的陆路交通工具。德国是现代磁悬浮技术的发源地,德国人早在1934年就申请了磁悬浮列车的发明专利,20世纪60年代以来,以德国和日本为代表的国家先后开始了磁浮铁路的研究,但技术和成本的问题使得高速磁悬浮在全球的推广之路异常坎坷[1-2]。进入到21世纪以后,中低速磁悬浮的发展异军突起,日本于2005年3月在爱知世博会上投入了世界上第1条中低速磁悬浮运营线路[3]。2014年7月,韩国继日本之后成为第2个拥有中低速磁悬浮线路的国家。
在中低速磁悬浮领域,我国历经30多年的探索和研究,已经形成了完全的自主知识产权和应用技术体系,是第3个掌握中低速磁悬浮技术的国家。2016年5月,我国第1条中低速磁悬浮线路长沙磁浮快线正式通车;2017年12月,我国第2条中低速磁悬浮线路北京S1线开通试运营[4]。相比于国家磁浮建设的快速推进,磁浮轨道几何参数测量技术的发展是滞后的,本文以中低速磁悬浮轨道结构为例,研究建立了一套影响列车运行稳定和安全的轨道几何参数评价体系及其测量标定方法,并在唐山磁浮试验线上进行了验证,为磁浮轨道的精密调试和磁浮轨检设备的量值统一提供了溯源依据。
1 中低速磁悬浮轨道的结构形式和几何参数体系
1.1 HSST系统轨道结构形式
中低速磁浮轨道结构形式有多种,其中最具代表性的是日本HSST(high speed surface transport)系統轨道结构,主要由直线电机感应板、F型导轨、轨枕、轨排接头、扣件和轨道承台等组成。轨道的基本结构和技术原理如图1所示,其采用的是常导电磁吸力悬浮模式,通电时,车载电磁铁与F型导磁轨道异性相吸,将列车向上吸起悬浮于轨道上,通过直线电机来牵引列车运行。车载电磁铁与F型导磁轨道之间的悬浮间隙一般为8~10mm,列车通过控制车载电磁铁的励磁电流来保证稳定的悬浮间隙[1]。
HSST轨道结构的核心部件是F型导轨,目前我国莱钢集团已经能够自主生产。F型导轨是承受磁浮列车悬浮力、导向力和牵引力的基础构件,结构如图2所示[5]。
为确保磁浮列车安全、平稳地行驶,F型导轨必须能够有效约束列车悬浮状态,尽可能提供连续、平顺的磁极面,使F型导轨磁极面与悬浮电磁铁磁极面之间形成相对闭合的磁场回路和稳定均匀的悬浮间隙。由此可见,轨道几何状态直接关系到磁浮列车的安全和运行的穩定性。
1.2 F型导轨几何参数体系
影响磁浮列车运行的主要几何状态包括轨距、轨向、高低、水平、轨缝和四磁极面直线度等[6-8]。
1)轨距
磁浮轨道的轨距是指,在左右两侧F型导轨的任意横截面上,悬浮检测面中点连线的距离,用于描述左右F型导轨的横向相对位置关系,如图3所示。轨距参数的大小直接影响磁浮列车与轨道的侧向间隙,会导致电磁吸力的侧向分力和上浮分力发生变化,从而影响列车的运行安全。
2)轨向
磁浮轨道的轨向是指F型导轨沿轨道延伸方向的横向偏差,如图4所示。由于F型导轨有左右之分,轨向亦可分为左轨向和右轨向。轨向的不平顺可导致列车的蛇行、摇摆和振动,影响行车的平稳和舒适。
3)高低
磁浮轨道的高低是指F型导轨沿轨道延伸方向的垂向偏差,由于F型导轨有左右之分,高低也可分为左高低和右高低。如图5所示,直线电机感应板沿轨道延伸方向的垂向偏差为上高低,悬浮检测面沿轨道延伸方向的垂向偏差为下高低;对于长为L的轨道,被测面(直线电机感应板或悬浮检测面)上的最大垂向偏差h即为该段轨道的高低值。高低不平顺会导致磁浮列车浮沉运动,甚至导致列车与轨道发生摩擦和碰撞。
4)水平
磁浮轨道的水平是指F型导轨的横截面上左右两轨的高度差。如图6所示,水平也可用左右两边悬浮检测面中点连线与水平线的夹角θ表示,一定的夹角可以平衡磁浮列车转弯时产生的离心力,保障列车平稳运行,但是异常的水平高差又会妨碍列车安全行驶。
5)轨缝
轨缝是轨道拼接处的缝隙,如图7所示,一般有3种形式:1为了应对温度变化导致的轨道热胀冷缩,施工时在轨道拼接处预留的伸缩缝;2轨道铺设施工时,拼接处高低不平产生的上下错缝;3轨道铺设施工时,拼接处左右不平产生的左右错缝。后面两种形式的轨缝可能会导致磁浮列车经过时发生摩擦和碰撞,影响列车行驶安全,应该尽量避免。
6)四磁极面直线度
四磁极面直线度是指在轨道横截面上左右两轨内外磁极面的共线程度,如图8所示。直线度越好,代表电磁铁和4个磁极面的距离越稳定均匀,产生的电磁吸力也更一致。
2 基于激光跟踪仪的中低速磁悬浮轨道静
态几何参数测量方法跟传统的轮轨列车不同,磁浮列车采用抱轨行驶,因此整个磁浮轨道的上下工作面对于列车同样重要,需要新的方法来精确地测量上述轨道几何状态参数。在试验线上,目前我国主要是利用自动跟踪全站仪和电子水准仪对磁悬浮F型轨道进行有限的静态几何检测,效率低,功能有限。本文采用LeicaAT401激光跟踪仪(测量范围≥320m,MPE:±(15μm+6μm/m)),实现了磁浮轨道的三维测量,全方位的描述了磁浮轨道的空间几何状态。
2.1 轨向的测量方法
首先应在F型导轨外磁极外侧面布点,布点时可以根据需要选择合适的步长,然后用激光跟踪仪测量所布点的空间坐标,再计算出轨向。
假设实验对象是一长度为L的平直轨道,以一水平参考面为XY平面,轨道延伸方向为Y轴,垂直Y方向为X轴建立空间直角坐标系,测得的单侧
点坐标为(x1,y1,z1),(x2,y2,z2),...,(xn,yn,zn),则该段长度为L的轨道轨向测得值:{x1,x2,···,xi}max?{x1,x2,···,xi}min(1)测量时测球可以搭配适当的小夹具以保证所测点的相对位置一致。由于轨向有左轨向和右轨向之分,实际测量中需要左右两边分别设站,为了统一两次设站的坐标系,跳站时选取稳定的基准点以减小误差。
2.2 高低和水平的测量方法
高低包括直线电机感应板的高低(上高低)和悬浮检测面的高低(下高低)。在感应板和悬浮检测面上分别布点,测得各点的空间坐标,再计算出高低值。测量时测球也可以搭配适当的小夹具以保证所测点的相对位置一致。测量高低时左右轨也需要分别设站,为了减少设站次数,单侧轨向和高低可以同时测量。水平不需要单独测量,可以根据测量高低时左右两轨悬浮检测面上的测量点坐标值进行计算,左右两轨悬浮检测面对应测量点的高差即为水平值。
假设在上述2.1建立的直角坐标系中,测得左侧一长度为L的轨道悬浮检测面的坐标值:(xL1,yL1,zL1),(xL2,yL2,zL2),...,(xLn,yLn,zLn);测得对应右侧长度为L的轨道悬浮检测面的坐标值:(xR1,yR1,zR1),(xR2,yR2,zR2),...,(xRn,yRn,zRn),则该段长度为L的轨道高低测得值:
该段长度为L的轨道上第i个截面的水平测得值:
2.3 四磁极面直线度的测量方法
四磁极面直线度本质上就是4个磁极的“水平”。先在F型导轨磁极面上布点,测得各点的空间坐标,再计算出同一截面上4个点的最大高差,即为四磁极面直线度。为了减少设站,可以参照2.2所述的方式,在左边设站时测量左侧轨道所有布点,在右边设站时测量右侧轨道所有布点。
假设在上述2.1建立的直角坐标系中,测得左侧轨道两个磁极面的坐标值分别为:(xa1,ya1,za1),(xa2,ya2,za2),...,(xan,yan,zan)和(xb1,yb1,zb1),(xb2,yb2,zb2),...,(xbn,ybn,zbn);测得右侧轨道两个磁极面的坐标值分别为:(xc1,yc1,zc1),(xc2,yc2,zc2),...,(xcn,ycn,zcn)和(xd1,yd1,zd1),(xd2,yd2,zd2),...,(xdn,ydn,zdn),则第i点的四磁极面直线度测得值:
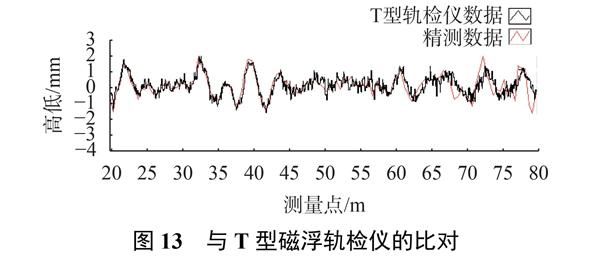
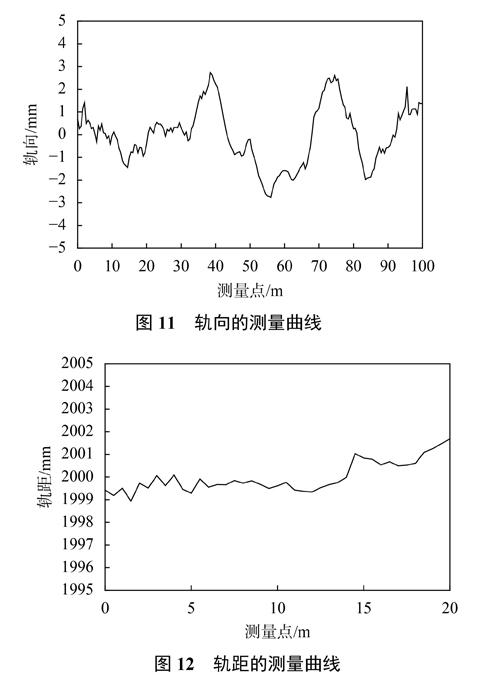
2)提出了基于激光跟踪仪的静态几何参数测量和计算方法,并在唐山国家中低速磁浮交通试验基地进行了现场验证和比对实验。现场测得磁悬浮轨道的轨向、高低和水平的波动基本在–3~3mm之间,轨距的变化基本在–1~1mm之间。以下高低为例,对激光跟踪仪的现场测量进行了不确定度评定,其扩展不确定度为0.50mm,这是由标准不确定度乘以包含因子k=2得到的,对于正态分布来说,对应的包含概率约为95%。就悬浮检测面的高低参数与国防科技大学最新研制的T型磁浮轨检仪进行了比对实验,有效地揭示了T型磁浮轨检仪的系统偏差。
3)随着长沙和北京的中低速磁悬浮列车线路相继进入运营阶段,国内市场上出现了第一代中低速磁悬浮轨道检测设备,磁浮轨检设备基本都是比较大型的系统,把单个的传感器拆分下来单独进行溯源意义不大。本文提出的基于激光跟踪仪的轨道标定和设备比对方法,既能满足磁浮轨检设备整体进行量值溯源的要求,又符合磁浮轨检设备的实际应用工况,可以解决以国防科技大学T型磁浮轨检仪为代表的磁浮轨检设备量值溯源难的突出问题,为正在兴起的磁浮产业保驾护航。
参考文献
[1]魏庆朝,孔永健,时瑾.磁浮铁路系统与技术[M].2版.北京:中国科学技术出版社,2010:25-50.
[2]吳祥明.磁浮列车[M].上海:上海科学技术出版社,2003:4-13.
[3] TEJIMA Y, LIU Z. Commercialization of HSST, an access line for the 2005 world exposition in Aichi, Japan[J]. Converter Technology & Electric Traction, 2005(3): 50-52.
[4]肖飞.中低速磁浮交通的技术经济性分析[J].铁道工程学报,2017(3):100-105.
[5]中低速磁浮交通轨排通用技术条件:CJT413-2012[S].北京:中国质检出版社,2012.
[6] INHO Y, SEUNG Y J, JUN S L. New guideway design for urban maglev in Korea[C]// The 20th International Conference on Magnetically Levitated Systems and Linear Drives: Guideway and Infrastructure, 2008, 20(7): 71-75.
[7] FEDERAL TRANSIT ADMINISTRATION. Assessment of CHSST Maglev for U.S. Urban transportation (final report)[R]. 2002.
[8]胡立峰,应立军,吴志祥.中低速磁悬浮列车轨道几何状态概述[J].企业家天地,2011(1):67-68.
[9]中低速磁浮交通车辆通用技术条件:CJT375-2011[S].北京:商务印书馆,2011.
[10]倪育才.实用测量不确定度评定[M].北京:中国质检出版社,2016:69-112.
[11]周文武,吴峻,李中秀,等.低速磁浮轨道几何参数测量系统[J].国防科技大学学报,2013,35(4):51-55.
(编辑:刘杨)
