
车联网城市交通移动多场景建模仿真及分析①
2019-11-15 07:05王超
计算机系统应用 2019年11期
王 超
(长安大学 信息工程学院,西安 710064)
引言
随着物联网技术的快速发展,近年来城市交通发展正朝着智能化、安全化和高效一体化方向推进.而车载自组织网络(Vehicular Ad Hoc NETworkS,VANETS) 的广泛应用无疑起到了关键的支撑作用,VANETS 作为一种特殊的移动Ad Hoc[1],其原理是通过在车辆上装配相关电子设备,并关联通信范围内的路侧单元(Road Side Unit,RSU),利用无线通信技术实现网络中车与车之间的通信(V2V)和车与基础设施之间的通信(V2I)[2].
当前研究人员针对移动Ad Hoc 类型网络下的协议仿真和节点通信的研究多是基于随机路点移动模型(Random WayPoint mobility model,RWP)、随机方向移动模型(Random Direction Model,RDM)和随机漫步移动模型(Random Walk Mobility model,RWM)等移动模型[3],而此类模型的最大特点就是节点移动的随机性.对比真实场景下的交通流运行状况,上述模型中的节点移动特性不能较为真实地反映实际情况中车辆节点的移动特点[4].当前城市交通中有交叉路口、匝道、潮汐车道以及双向快速四车道等多种移动场景,为了体现场景的通用性和代表性,本文采用VanetMobiSim仿真器构建不同交通场景下的节点移动模型以逼真模拟真实交通流,以此构建交叉路口和双向快速四车道这两种在车辆密度、车速以及拓扑结构上有明显区分度的城市常见交通移动场景.
当前车载自组织网络中所使用的路由协议大部分起源于传统的移动Ad Hoc 网络[5],而基于网络拓扑结构的路由协议是Ad Hoc 网络下最具代表性的一类协议,根据路由的驱动方式又可将该类型的协议分成先应式路由协议(又称表驱动路由协议)和反应式路由协议(又称按需路由协议)[6,7].其中DSDV (Destination-Sequenced Distance-Vector routing)是经典的表驱动路由算法[8],而AODV (Ad Hoc On-demand Distance Vector routing)是经典的源驱动路由算法[9].
所以本文拟在NS2 仿真环境下引入这两种不同类型的协议并在不同应用场景中进行仿真实验,以此对比不同协议在不同移动场景下的通信效果.
1 节点移动模型概述
节点移动模型的作用是描述节点的移动方式,包括其方向、位置、速度及加速度等[10],通过对车辆具体行为的抽象描述,数据化处理节点在每个时钟嘀嗒的行为动作,最终生成相关的车辆行驶信息,而车辆节点通过遍历该信息完成整个移动过程.根据节点的移动特性又可以将节点移动模型划分成独立节点移动模型和具有群组特性的节点移动模型.
独立节点移动模型主要包括随机路点移动模型、随机方向移动模型和随机漫步移动模型.在进行移动Ad Hoc 网络仿真实验时,研究人员经常采用上述的三种移动模型构建相关的移动场景.其中,Maurya AK 等[11]使用随机路点移动模型来设计网络,基于平均端到端延迟,分组投递率,吞吐量和平均抖动率评价移动Ad Hoc 网络下不同协议的性能特性.Gupta P 等[12]基于随机路点移动模型,研究AODV,DSDV,DSR 和OLSR在分组投递率,平均端到端延迟和标准化路由负载方面的性能区别,以此评估节点移动性对路由协议的影响.Carofiglio G 等[13]在引入随机方向移动模型的基础上,研究易受到由节点移动引起链路故障的路由的可用性和持续时间概率,通过考虑研究路由可用性选择最佳路由,提出了一种提高反应路由协议效率的方法.Sharma A 等[14]在随机漫步移动模型下比较了反应式和主动式协议,并讨论了不同类型的协议所适合的网络类型.Mohanborah A 等[15]对移动Ad Hoc 网络下的随机路点移动模型、随机方向移动模型和随机漫步移动模型进行了对比分析,通过调节相关参数对网络的拥塞控制进行研究.
由于真实车载自组织网络下的车辆节点具有群组特性,且受到最大速度、路口方向选择、以及红绿灯等其他因素的影响,而传统仿真过程中使用的上述3 种移动模型存在节点平均速度衰减、稳态分布不均匀以及节点密度波动现象[16],且均没有考虑真实交通场景下如红灯减速、换道超车以及让行等各种行为和限制,进而导致对仿真结果的分析产生很大的误差,所以不适合采用此类模型进行车载自组织网络下的路由协议仿真[4].
通过引入适当的移动模型可以合理评价不同路由协议在不同场景下的性能,为了正确模拟现实网络中的拓扑结构和客观反映车辆节点的移动特性,并真实展现交通场景中的交通流运行状况以及有效对比评估协议通信效果,本文首先针对常见的交通应用场景进行仿真,即建立交通移动场景模型.
2 城市交通场景移动模型构建
通过分析车联网的拓扑结构以及车辆节点的移动特性,本文设计构建了交叉路口和双向快速四车道这两类应用场景的移动模型.
2.1 交通场景移动建模
本文中所构建的交叉路口移动场景和双向快速四车道移动场景均是对IDM (Intelligent Driver Model)模型进行扩展[17],其中双向快速四车道具备超车和多车道功能,而交叉路口场景在此基础上又增加了交叉路口管理功能[18].
双向快速四车道场景可描述为两个相反方向的直行车道各占两条车道,车辆时速为40 km/h-70 km/h,即在城市交通环境中交通流较为通畅的状态.同方向的车道允许车辆间实现换道、超车等行为,而不同方向的车道间不可逾越,并以隔离带的形式分隔开.在车与车之间能够互相通信的前提下,可以通过设置车辆的安全换道时间和礼貌因子对车辆换道行为及驾驶员素质进行描述[19],其中安全换道时间指的是完成换道所要花费的时间,而礼貌因子则描述的是该驾驶员的驾驶素质,若礼貌因子为负则认为驾驶员具有自私行为.通过两者的有机结合可以对车辆的行驶特性进行更为深刻的描述.
交叉路口场景是由交通标志管理和由交通灯管理的交叉路口,交叉路口车辆时速在15 km/h-35 km/h 之间,通常城市交通中交叉口车流量较大,车速较慢.本模型中一旦车辆在停车标志前停止,它就会被告知所有引入该交叉路口的等待通行的车辆的数量.如果数量为零,则该车辆可以通过,否则,需遵循先到先过以及右转弯规则.当车辆驶向红绿灯交叉路口时,如果是绿灯,车辆将以现行的速度驶过交叉路口.如果是红灯,车辆将拒绝通过并且使用类似于停车标志、修改IDM参数的方式使车辆减速最终停在交叉路口前.
当遇到红绿灯时,车辆的行驶动作可以根据红灯到绿灯以及绿灯到红灯的转换而做相应的动态改变.前一种情况下,遇到红灯减速前行的车辆在遇到绿灯亮时,可以再次加速.在后一种情况下,保持现有状态驶向绿灯的车辆,当红灯亮它还没有通过交叉路口时,将会停止前行.由于道路之间车道数量会有所不同,所以靠近交叉路口的车辆会根据VanetMobiSim 的宏移动性得到它将要驶入的道路结构.然而,在车辆驶过交叉路口后,有以下行为方式:如果车辆正在行驶的车道也在它行驶路径的下一条车道上,那么车辆驶过交叉路口后继续在下一条街的相同车道上行驶;如果车辆正在行驶的车道在交叉路口的下条街道上不存在,那么当车辆接近交叉路口时它会驶向街道的右边.如果不能这样行驶,例如车道的右边交通很拥挤,则于交叉路口处等待直到车道空闲.
2.2 模型参数设置
在本文的设定中,在双向快速四车道移动场景下,车辆行驶速度较快,车辆密度较为稀疏,网络拓扑结构变化较快;而与之形成鲜明对比的是交叉路口移动场景下,车辆行驶速度较慢,车辆密度较密集,网络拓扑结构变化较慢;对应上述宏观描述的微观参数设定见表1和表2,交叉路口及双向快速四车道移动场景模型如图1、图2所示.其中舒适减速度指的是当前车辆以某一固定的减速度(m/s2)从当前速度开始减速直至车辆停止,减速过程符合到停车点位置的距离约束,且减速停车的过程缓和,未出现急刹车等影响驾乘体验的减速行为,即整个过程即满足环境和交通约束,也使得车内人员有良好的驾乘体验.

表1 交叉路口移动场景仿真参数设定
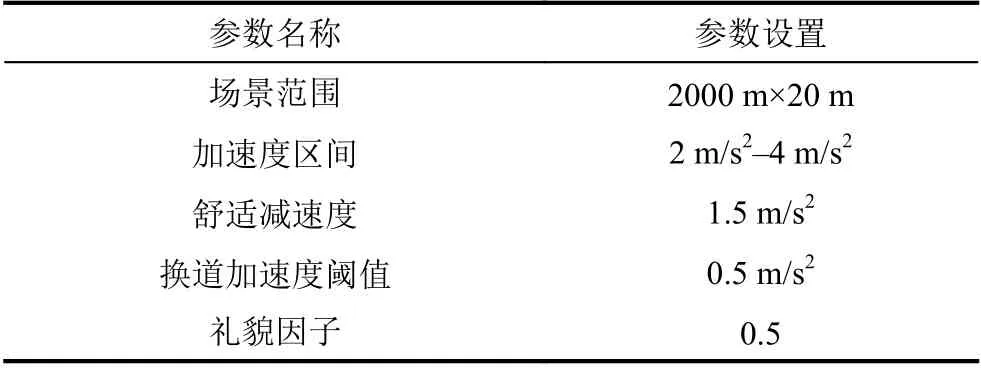
表2 双向快速四车道移动场景仿真参数设定
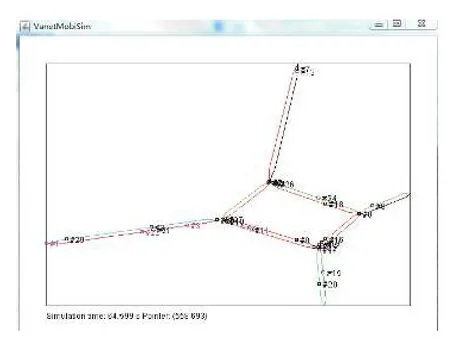
图1 交叉路口移动场景某时刻状态仿真图
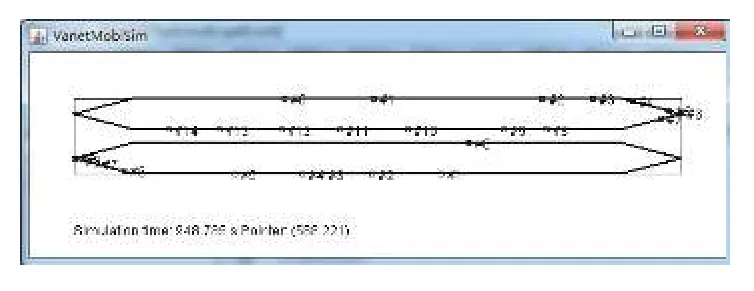
图2 双向快速四车道移动场景某时刻状态仿真图
本文对于交叉路口和双向快速四车道的舒适减速度的设定均是通过采集现实场景中对应场景下的大量实体车辆并作均值计算而设定的.
3 仿真结果与分析
为了模拟车辆节点间的网络数据通信,本文采用NS-2 针对网络通信过程进行仿真.通过向NS-2 中引入VanetMobiSim 仿真器产生的车辆节点行车轨迹数据,实现逼真交通移动场景下的车辆通信联合仿真实验.NS2 仿真器的相关参数设置如表3所示,同时采用时延、开销、抖动率和丢包率4 个常用指标评价协议的性能.
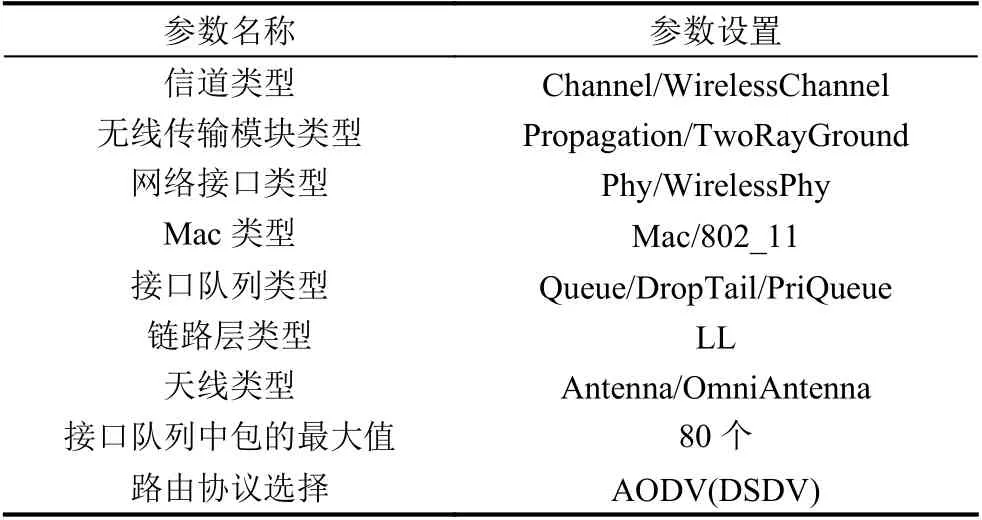
表3 NS2 中移动节点参数设置
3.1 交叉路口场景协议仿真对比
车载自组织网络仿真范围设定为1000 m×1000 m,仿真时间为60 s,交叉口附近的车辆数设定为40 辆,驶入或驶离交叉口的速度维持在15 km/h-35 km/h.
① 端到端时延对比
通过图3和图4两种路由在交叉路口处的端到端时延的表现对比可以发现,AODV 协议的时延区间维持在(0,0.17 s),而DSDV 协议的时延区间维持在(0,0.04 s),且DSDV 协议运行过程中的大部分时间节点处的延迟均比相同时间节点处使用AODV 协议传输的延迟短.
② 协议开销对比
通过图5中两种路由协议在交叉路口处的控制包开销对比可以发现,DSDV 的协议开销高于AODV 的协议开销,且二者皆有增长的趋势,即随着时间增长,DSDV 的协议开销将会远远高于AODV 的协议开销.
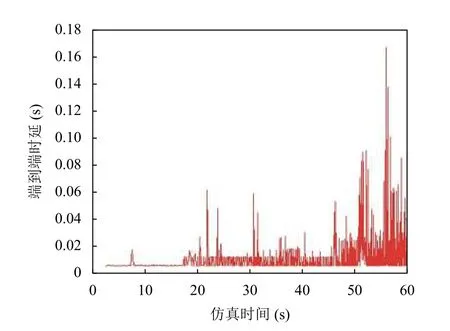
图3 交叉路口场景下时使用AODV 协议的端到端时延
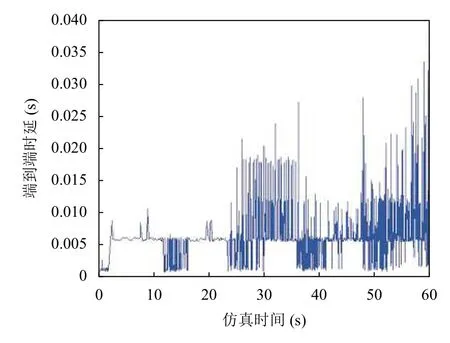
图4 交叉路口场景下时使用DSDV 协议的端到端时延
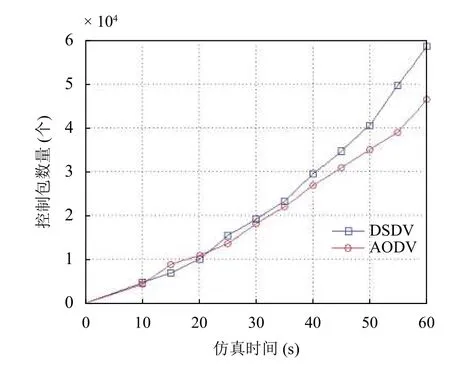
图5 交叉路口场景下协议开销对比
③ 抖动率对比
图6和图7表明,AODV 协议的抖动率区间在(-1,0.7),而DSDV 协议的抖动率区间在(-0.15,0.15),且DSDV 协议运行过程中的大部分时间节点处的抖动率比相同时间节点处使用AODV 协议传输的抖动率小.
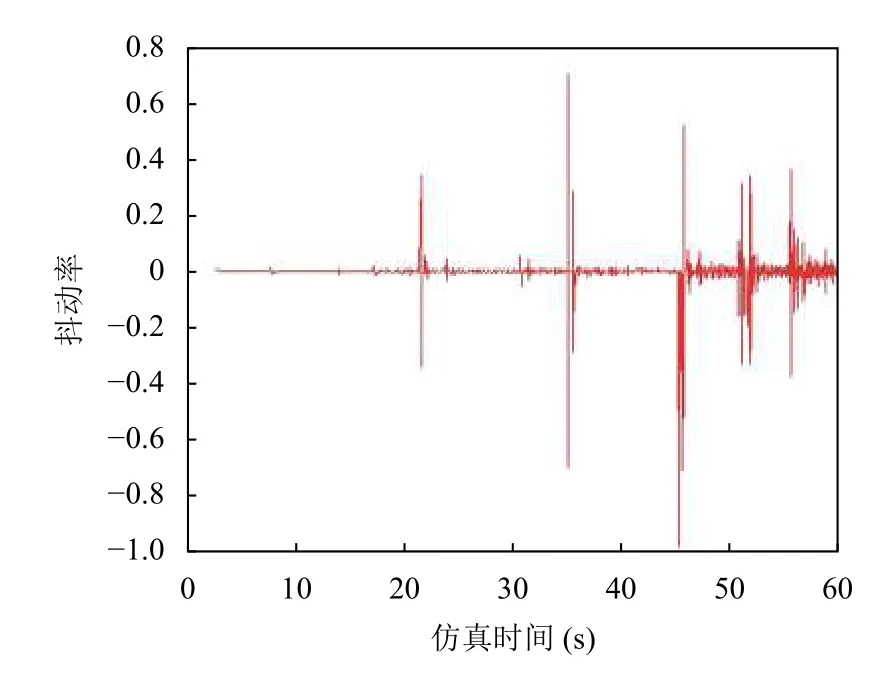
图6 交叉路口场景下时使用AODV 协议的抖动率
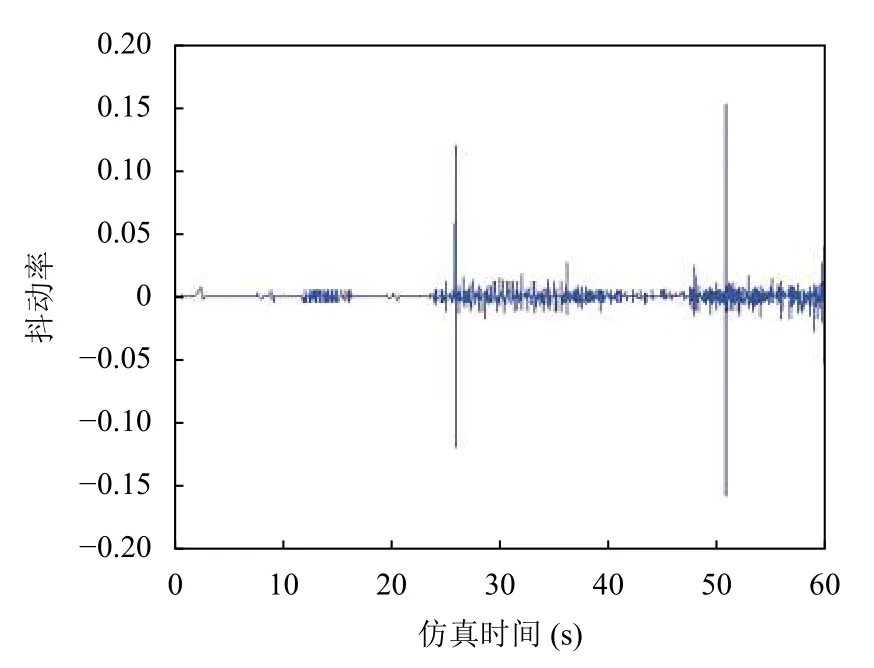
图7 交叉路口场景下时使用DSDV 协议的抖动率
④ 丢包率对比
图8表明,在交叉路口场景下AODV 协议的丢包情况比DSDV 严重,但随着时间的推移,两种协议下的丢包情况均趋向缓和,且有逐渐稳定的趋势.
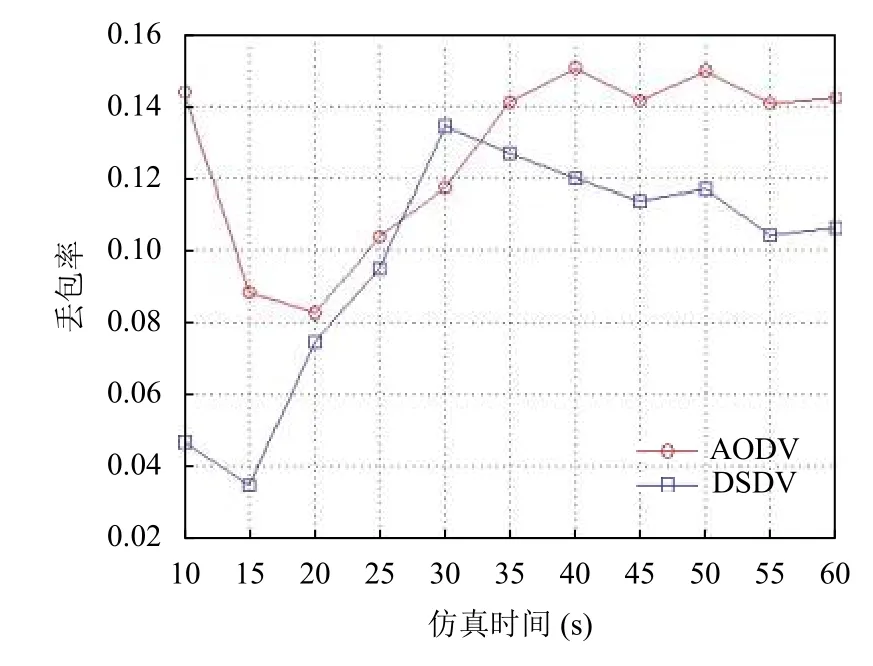
图8 交叉路口场景下协议丢包率对比
3.2 双向快速四车道场景协议仿真对比
仿真范围设定为2000 m×20 m,仿真时间设定为160 s,四车道车辆数为40 辆,车辆行驶速度维持在40 km/h-70 km/h.
① 端到端时延对比
图9和图10表明,随着仿真时间推移,DSDV 端到端时迟有增大的趋势,而AODV 时迟增大趋势较缓.
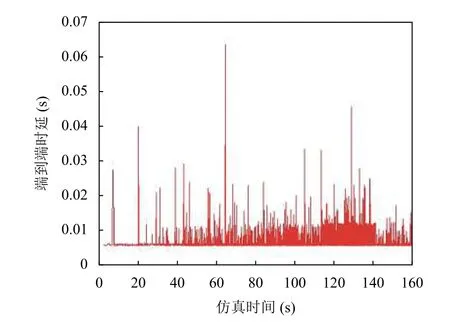
图9 双向快速四车道场景下时使用AODV 协议的端到端时延
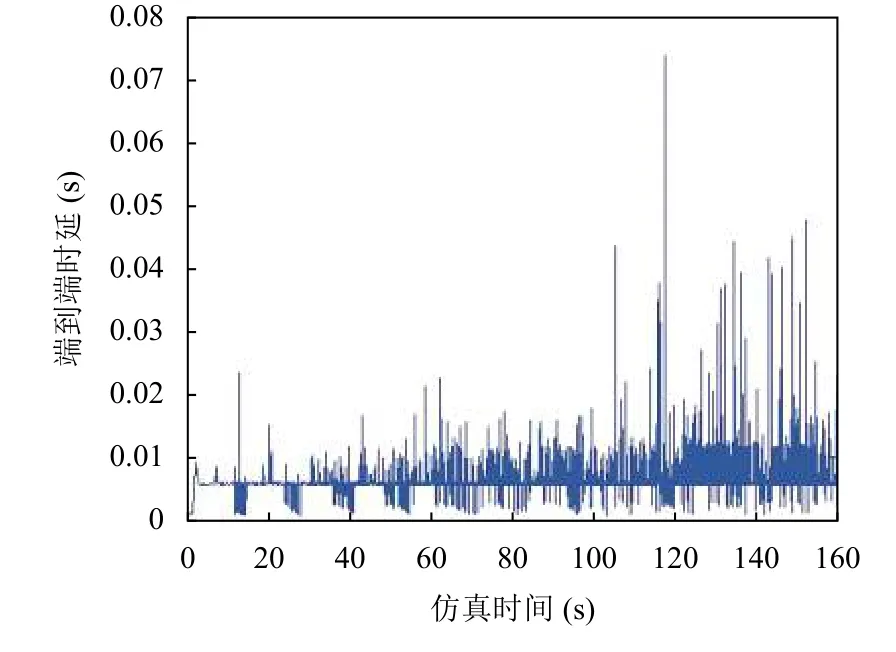
图10 双向快速四车道场景下时使用DSDV 协议的端到端时延
② 协议开销对比
图11表明,DSDV 的协议开销高于AODV 的协议开销,且二者皆有增长的趋势,即随着时间增长,DSDV的协议开销将远远高于AODV 的协议开销.
③ 抖动率对比
图12和图13表明,AODV 和 DSDV 二者在抖动率整体趋势上没有明显差别,但通过对比发现运行AODV 协议的网络的平均抖动率相较于运行DSDV协议的网络平均抖动率小很多.
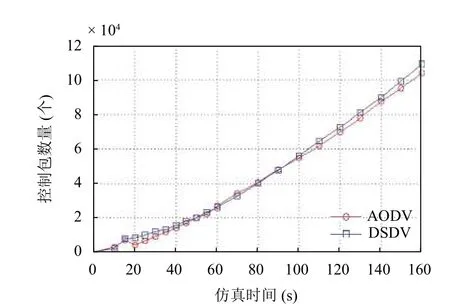
图11 双向快速四车道场景下协议开销对比
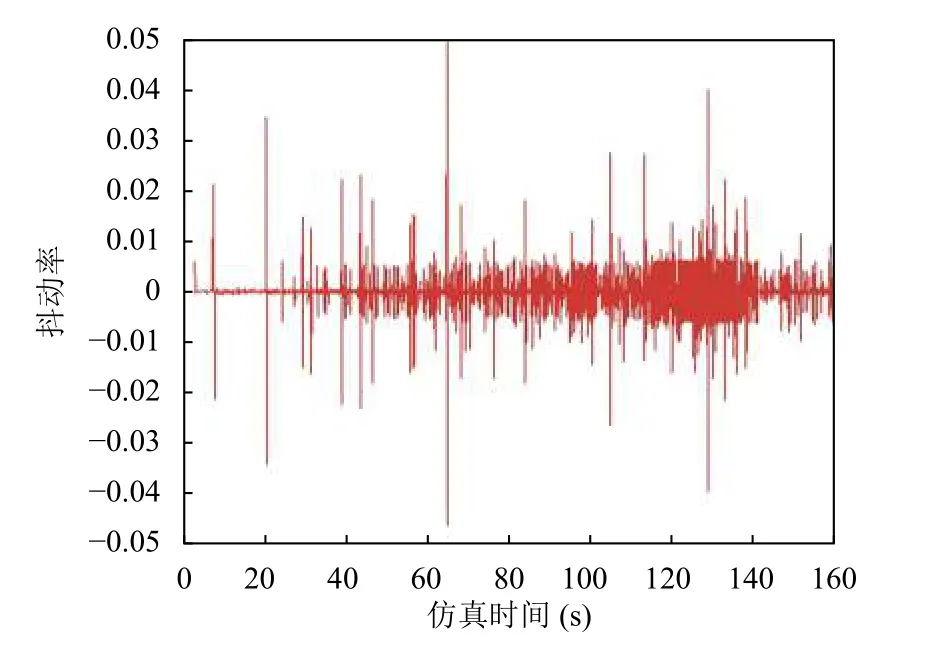
图12 双向快速四车道场景下时使用AODV 协议的抖动率
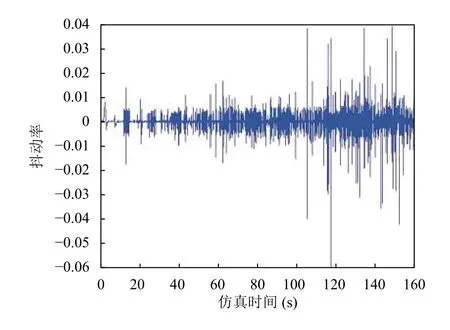
图13 双向快速四车道场景下时使用DSDV 协议的抖动率
④ 丢包率对比
图14表明,AODV 协议的丢包情况比DSDV 严重,但随着时间的推移,两种协议下的丢包情况均有缓和,且均有下降的趋势.但可以看出AODV 协议丢包率下降趋势明显较快.
通过上述时延仿真结果分析发现,AODV 路由协议可以较好地适应双向快速四车道这样的网络拓扑结构变化较为频繁的环境.一旦节点发生移动,只需要更新有发送数据需求的相关路径的路由信息即可,相较于DSDV 这类的先验式路由协议,其自身没有大量的控制消息,所以协议开销较小.对于复杂多变的场景,AODV 表现出较强的适应性和较好的稳定性,在保证时延处于可接受范围内的同时,开销也相对低一些.但由于AODV 缺少路由表进而导致在面对类似交叉路口这类的拥塞场景时,数据传输过程存在较大延迟,且网络传输不太稳定,初始时的丢包率也偏高.而在使用DSDV 协议的过程中,一旦源节点需要发送报文,就可以立即得到到达目的节点的路由,因此该路由的时延较小,但在面对双向多车道这样的网络规模庞大、网络拓扑结构变化较快的场景时,由于存在大量控制报文导致协议开销较大,进而造成传输效率偏低.
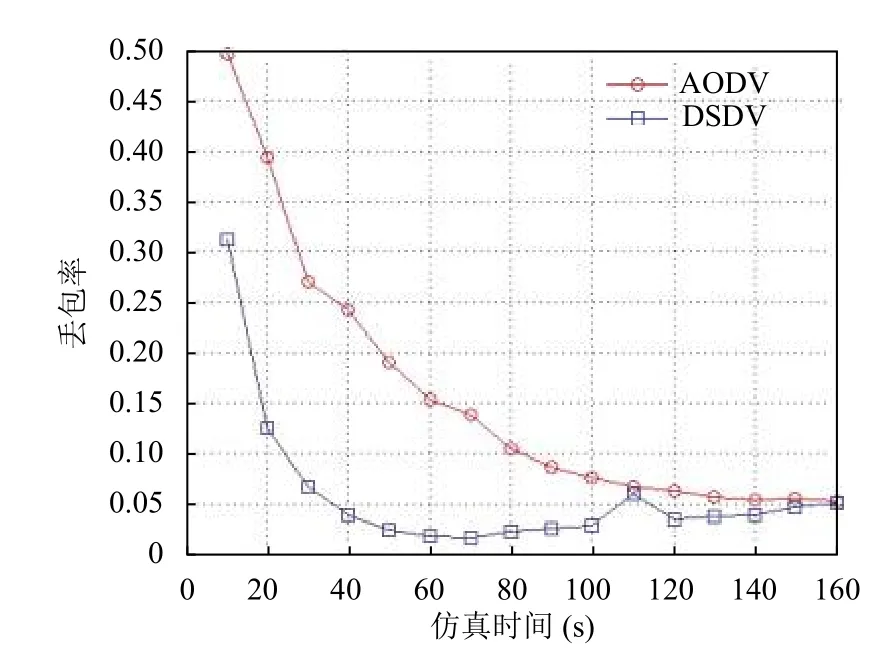
图14 双向快速四车道场景下协议丢包率对比
仿真实验结果表明,在面对复杂多变的交通场景时,AODV 这类的反应式路由协议表现出较好的适应性.通过端到端时延和开销的综合分析评价,可以看出相比于DSDV 这类的先验式路由协议,其在传输效率上有着较为明显的优势.而结合抖动率和丢包率的表现情况来看,AODV 这类的反应式路由协议在消息安全和完整投递方面则受多种环境因素影响,尽管整体趋势逐渐变优,但初期表现不理想且后期效果存在波动.
3.3 环境因子对AODV 协议影响分析
为了进一步研究影响AODV 性能的环境因素,本文决定从网络通信量和拓扑结构变化及复杂程度两大方面入手,以带有交叉口的双向快速四车道的环境为仿真场景,其中网络通信量以车辆节点最大联机数(即产生的数据流数目)和车辆节点发包率(每秒送出的封包数)为变化因子;拓扑结构变化及复杂程度以车辆节点的速度和密度为变化因子,以丢包率为评价标准,对AODV 协议的安全稳定性受影响因素进行分析.
通过图15和图16三维图像的对比可以发现,在维持其他影响因素不变的情况下AODV 协议的安全稳定性受网络拓扑结构变化和复杂性影响程度远远高于受网络通信量影响.因此为了提升AODV 这类的反应式路由协议的安全稳定性,需着眼于网络拓扑变化及复杂程度,通过引入地理位置等信息辅佐路由建立和数据传输,从而提高该协议的性能.
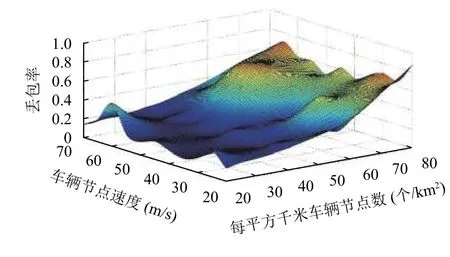
图15 AODV 协议下丢包率随拓扑结构变化快慢及复杂程度变化曲面
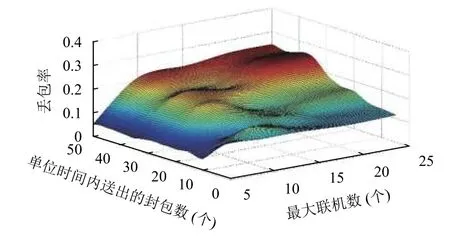
图16 AODV 协议下丢包率随拓扑结构变化快慢及复杂程度变化曲面
4 总结和展望
目前,大多数的路由协议仿真都是基于传统的RWP、RDM 和RWM 等移动模型场景,这种随机移动模型场景不能真实客观地反映真实交通流的移动特性.而本文所构建的交叉路口和双向快速四车道移动的两种模型是典型的群组模型应用,均包含了关于车辆速度和加速度、对车辆队列管理和拥塞管理等因素的描述.其中,交叉路口模型侧重交叉口车辆管理,双向快速四车道集成了一个超车模型以及加减速度管理.在本文的仿真试验中,针对交叉路口采用的是管理智能驾驶模型,分别从端到端时延、协议包开销、抖动率、丢包率4 个方面仿真了AODV 和DSDV 这两种路由协议在不同场景下的性能效果.实验结果表明DSDV 在简单稳定的交通场景下表现出较高的传输效率和稳定性,而AODV 在复杂多变交通场景下表现出良好的适应性.为了分析AODV 受何种因素影响较大,本文再次针对AODV 做了详细分析,发现网络拓扑结构变化频率和复杂程度对AODV 协议的稳定性和安全性影响较大.本文提出的模型,相较于传统的random waypoint 等模型更能贴近实际地描述车辆群体间的协作和共生状态,具有较高的真实性和可信度.
为了实现高效稳定的数据传输,后期作者准备引入地理位置信息,用以辅助合适的协议选择,形成自适应的协议决策推荐系统,并根据周边交通流状况适时调整路由选择和数据传输等动作,以达到不同路段协议适配最优,协议使用过程中建立高效路由并实现数据的稳定传输.
猜你喜欢
汽车实用技术(2022年9期)2022-05-20
今日农业(2021年19期)2021-11-27
建材发展导向(2021年13期)2021-07-28
计算机与网络(2020年9期)2020-07-29
传播力研究(2019年24期)2019-10-21
价值工程(2019年18期)2019-07-25
科技与创新(2018年1期)2018-12-23
人大建设(2018年7期)2018-09-19
世界家苑(2018年6期)2018-07-23
中国房地产业·上旬(2018年3期)2018-05-14
